某企业康复辅助机器人
发布时间:2023-07-03
-

康复机器人模型.png
-

康复机器人轴测图.png
-

康复机器人主视图.png
-
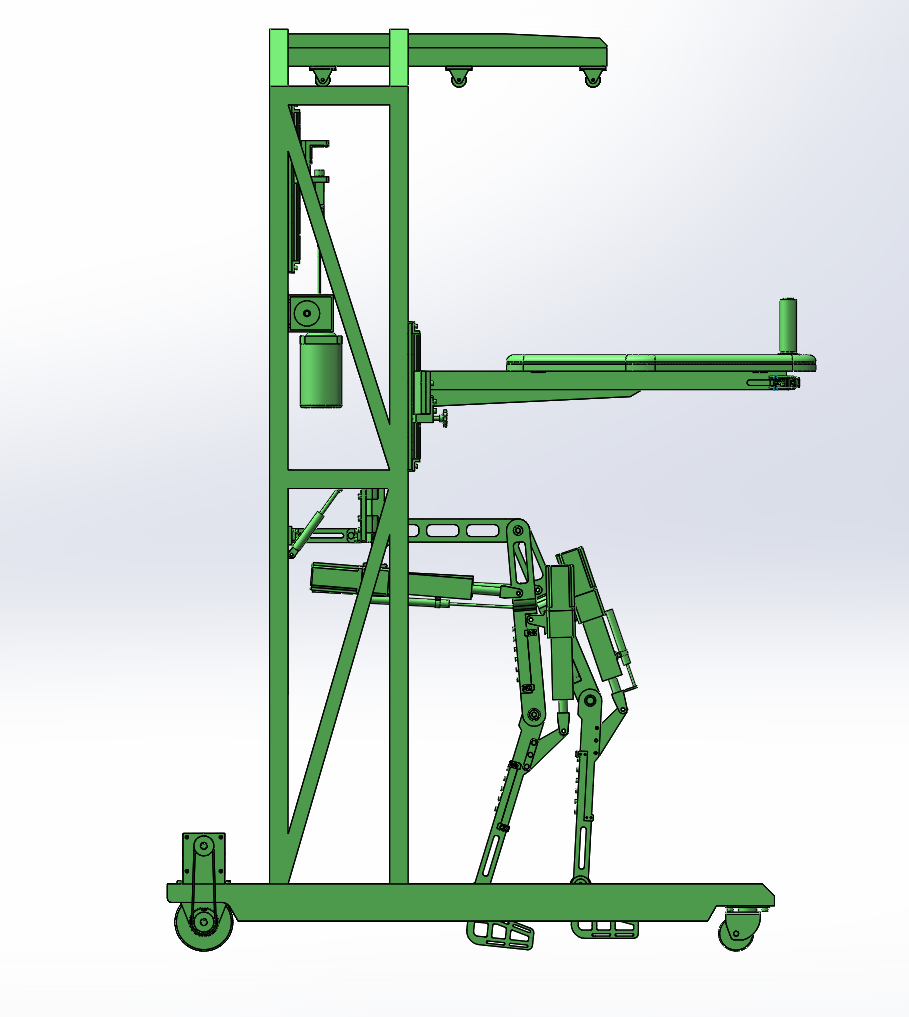
康复机器人侧视图.png
-

康复机器人俯视图.png
-

sw源文件及step.png
-

UG源文件.png
图纸描述
康复机器人是研制用于辅助偏瘫或其他运动障碍的患者的基于神经肌肉电刺激的两点悬臂绳牵引式的上肢康复训练的机器人及其配套的控制系统。初步的目的是研制一款可以引导患肢进行多关节、大范围的和柔性连接的主动与被动结合运动训练的机器人,并能采集训练数据。其中采用了三根可上下收缩的绳索控制上肢的上下运动,其余控制上肢水平运动。 上肢康复运动训练,大概包括:1、肩关节屈伸运动训练2、肩关节外展、内收运动训练3、肩关节内外旋运动训练。本模型建模精巧,NX8.5 【可编辑、含参数】,另含sw2018格式及stp通用格式,可供大家参考!
