六轴机器人.png
夹爪(手爪).png
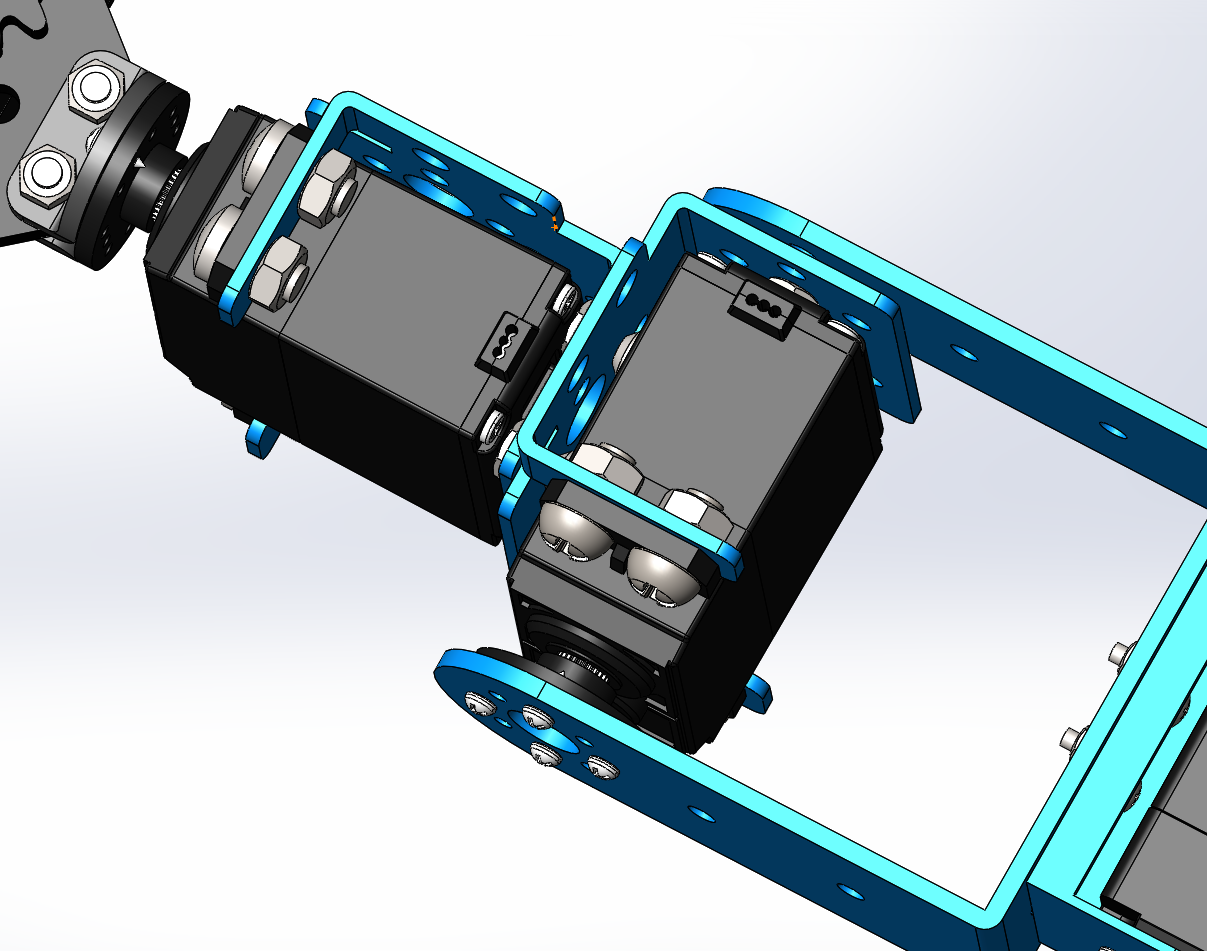
夹爪腕部细节图.png
六轴机器人轴测图.png
六轴机器人主视图.png
六轴机器人侧视图.png
六轴机器人俯视图.png
本模型为六轴机器人,采用5组伺服电机驱动完成6自由度运动,夹爪采用伺服电机驱动齿轮+平行连杆结构实现夹取物品,适用于抓取管件物品,可供大家参考!
持之以恒
图纸ID: 53447637529137563
图纸格式:sldprt、SLDPRT、sldasm、SLDASM
图纸版本:Solidworks2016
文件大小:10.60MB
所需积分:35机械币
可否编辑: 可进行编辑,不包含参数
关注人数:0人