采摘机器人(车)轴测图.png
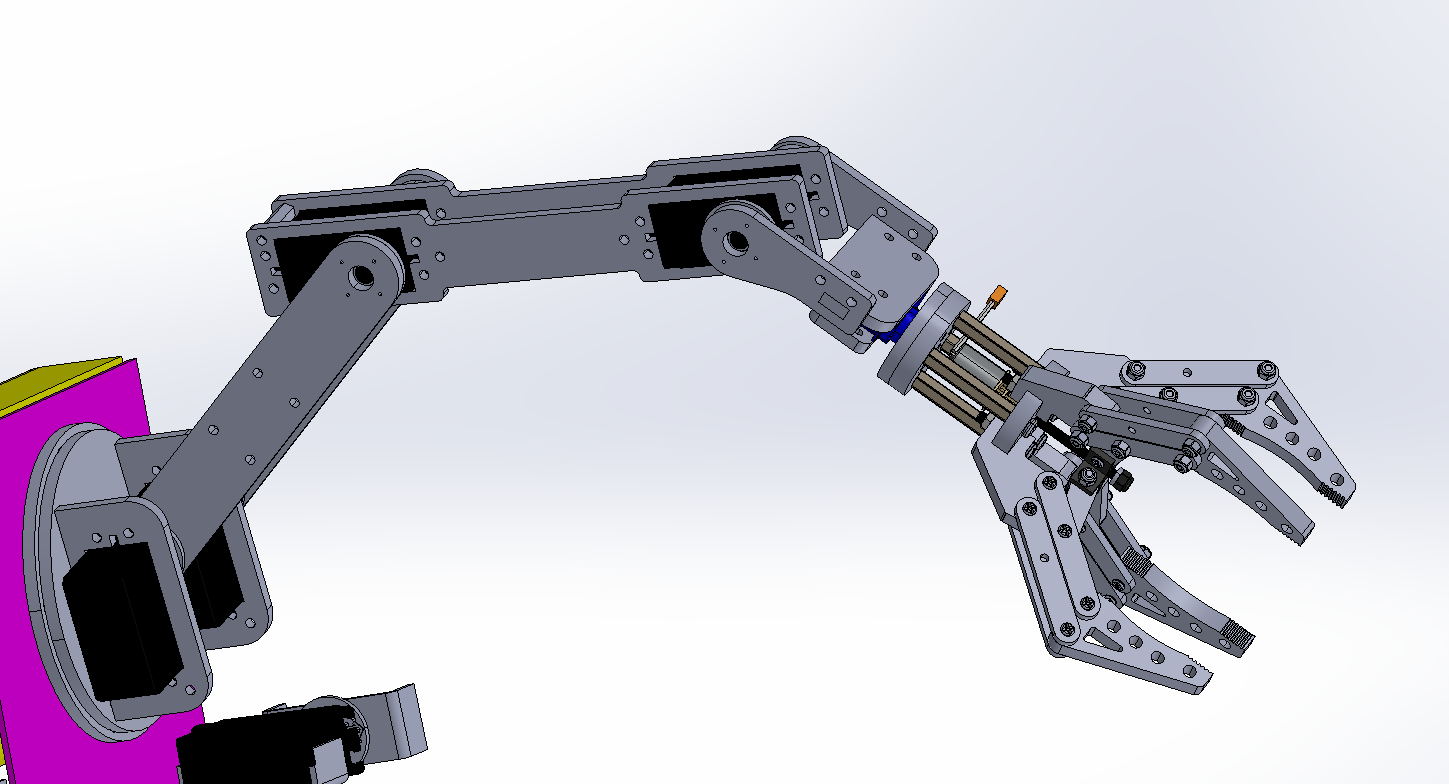
采摘机械手.png
麦克纳姆轮.png
采摘机器人(车).png
本模型为基于麦克纳姆轮的双臂采摘机器人(车),采用麦克纳姆轮可以实现前行、横移、斜行、旋转及其组合等运动,设有双臂和四爪抓取机构,提高采摘效率,可摘水果(如西瓜、苹果、梨等)、蔬菜等各种形状的农作物,建模精巧,可供大家参考!
持之以恒
图纸ID: 53447637529137526
图纸格式:STEP
图纸版本:其它模型软件
文件大小:2.03MB
所需积分:20机械币
可否编辑: 可进行编辑,不包含参数
关注人数:0人