四足爬行仿真动态.gif
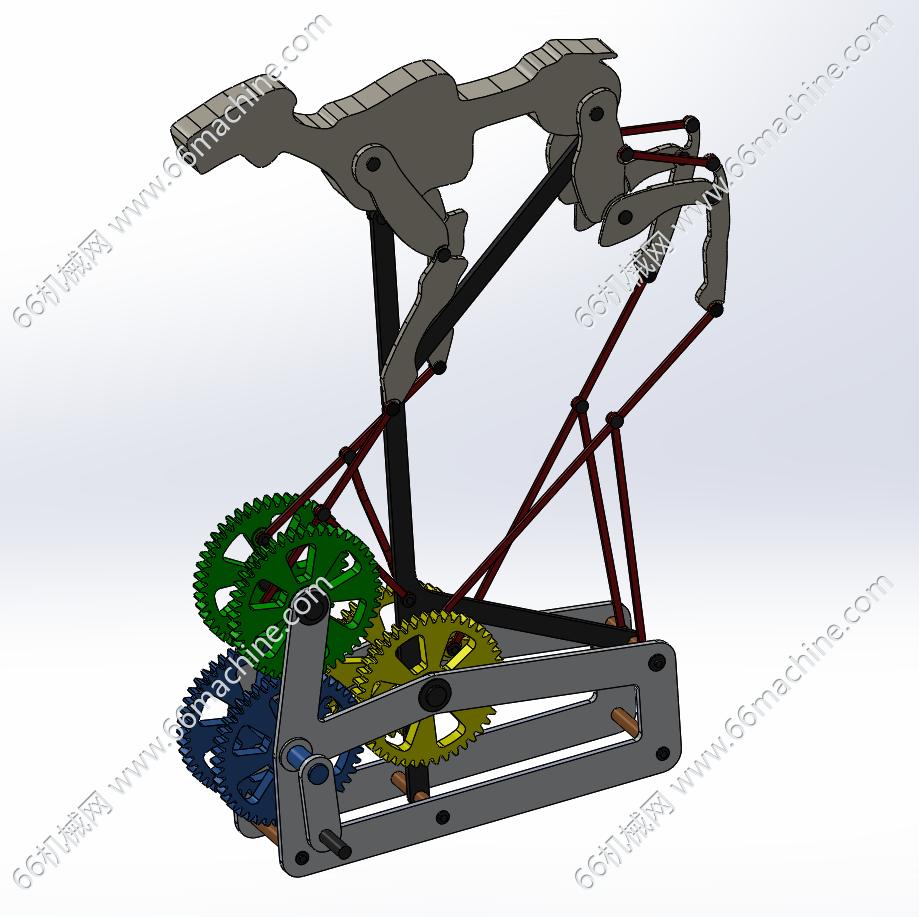
四足爬行机构仿真.png
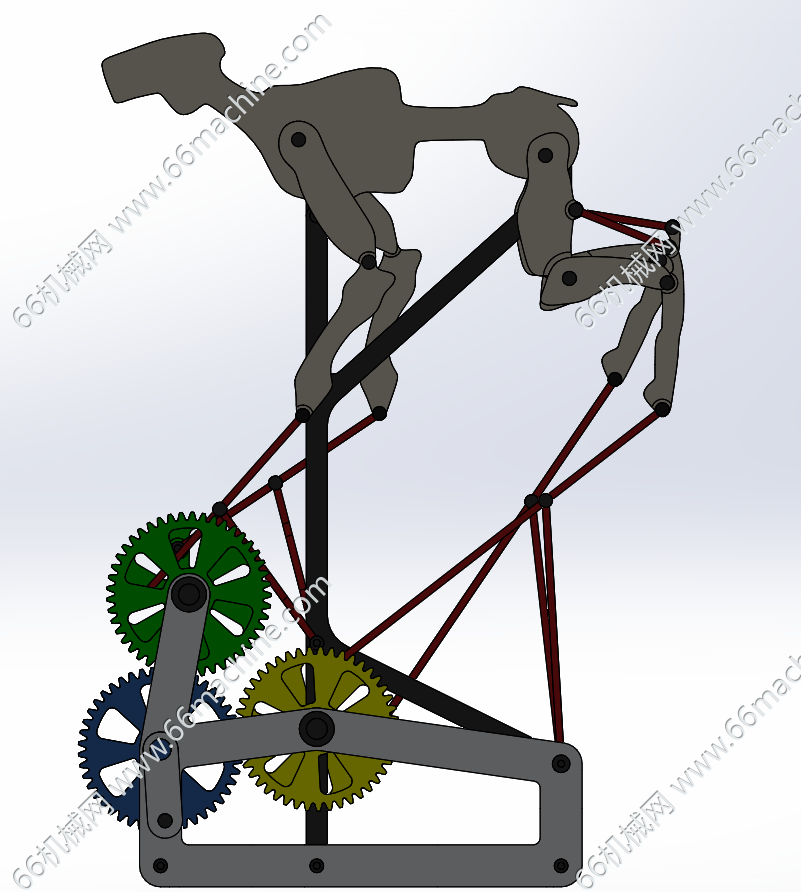
四足爬行机构仿真主视图.png
四足爬行机构仿真侧视图.png
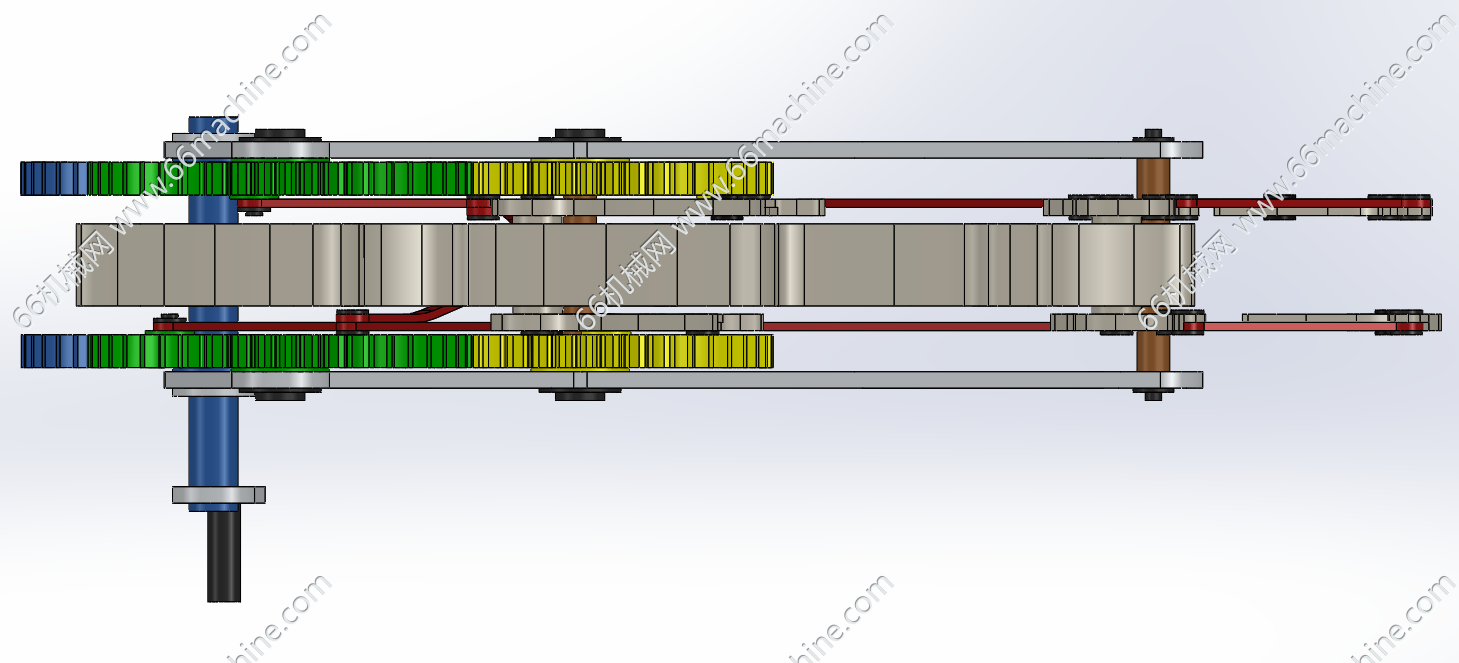
四足爬行机构仿真俯视图.png
本模型为四足爬行机构仿真,采用手柄输入动力驱动齿轮系转动,齿轮带动连杆协同动作进而实现四足的爬行动作,本模型为UG版本,另含x-t通用格式,欢迎参考!
持之以恒
图纸ID: 315092070404591927
图纸格式:x_t、prt、msg、rad、rmd、rplt、sim
图纸版本:NX 1847
文件大小:7.85MB
所需积分:20机械币
可否编辑: 可进行编辑,不包含参数
关注人数:0人