基于麦克纳姆轮的智能取物料机器人
发布时间:2024-04-25
-

智能取物料机器人.png
-

机械手.png
-
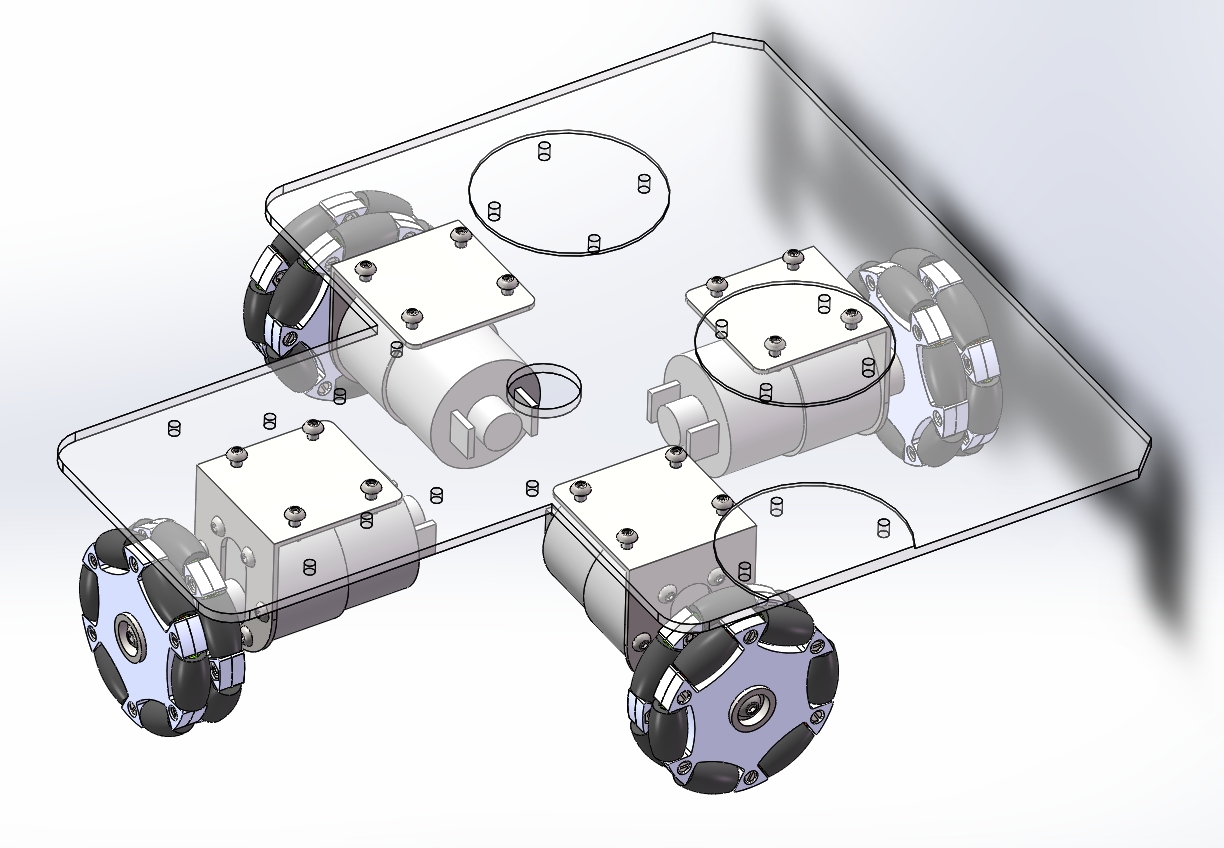
四驱底盘.png
-

麦克纳姆轮及其驱动电机.png
-

智能取物料机器人轴测图.png
-

智能取物料机器人主视图.png
-

智能取物料机器人侧视图.png
-

智能取物料机器人俯视图.png
图纸描述
本模型为基于麦克纳姆轮的智能取物料机器人,机器人移动取料是一种智能化生产方式,其原理基于机器人视觉技术和自主移动技术。机器人通过搭载摄像头和图像识别算法,可以自主识别工作区域中的物料,并在自身移动的同时将其取出。机器人还可以通过对环境的观测和感知,自动避免碰撞和障碍物,实现高效安全的取料操作。
