管道内爬行机器人(可以搭载超声波检测装置或工业相机等视觉组件)
发布时间:2024-03-20
-

管道内爬行机器人.png
-

管道内爬行机器人渲染图.jpg
-
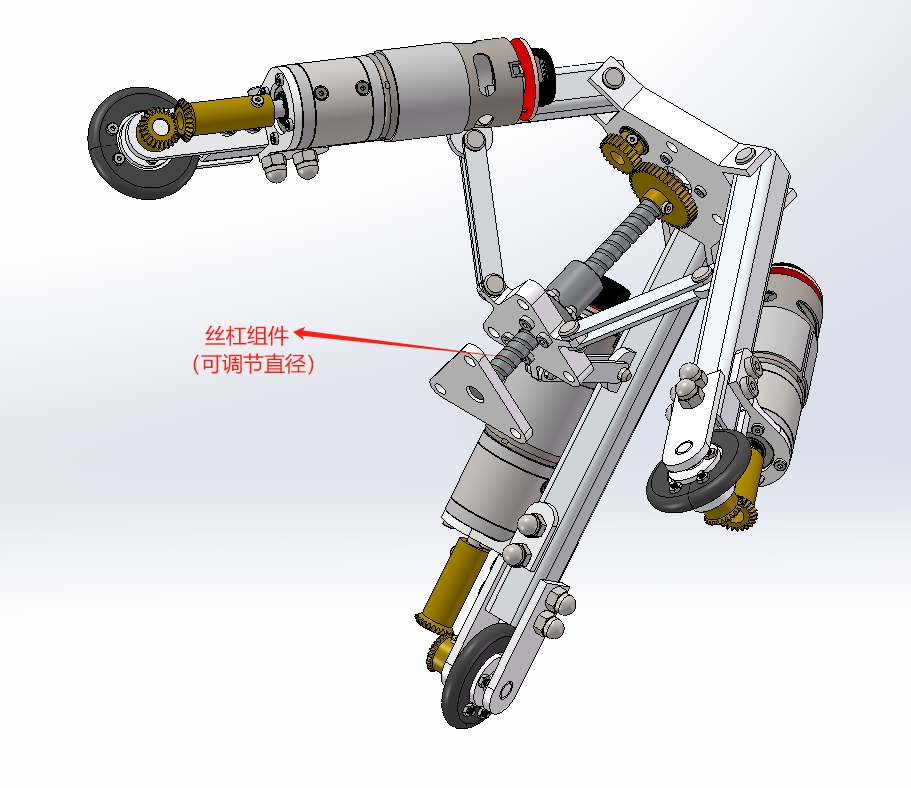
可变径动力部.png
-

管道内爬行机器人主视图.png
-

管道内爬行机器人侧视图.png
图纸描述
圆形管道在各种流体传输中得到大量应用,管道在使用的过程中会不可避免的产生各种问题,需要进到管道内部进行无损探测。设计了一 种可沿管道内部自主移动的爬行机构,该机构可以在内径600mm(误差在±10mm以内)的管道内定位,能沿平缓地形中(坡度不超过15度)的弯曲管道(弯曲半径不小于10米)轴线前后运动,可以搭载超声波检测装置或工业相机等视觉组件,可供大家参考!
