双夹爪PPU机械手
发布时间:2026-03-17
-
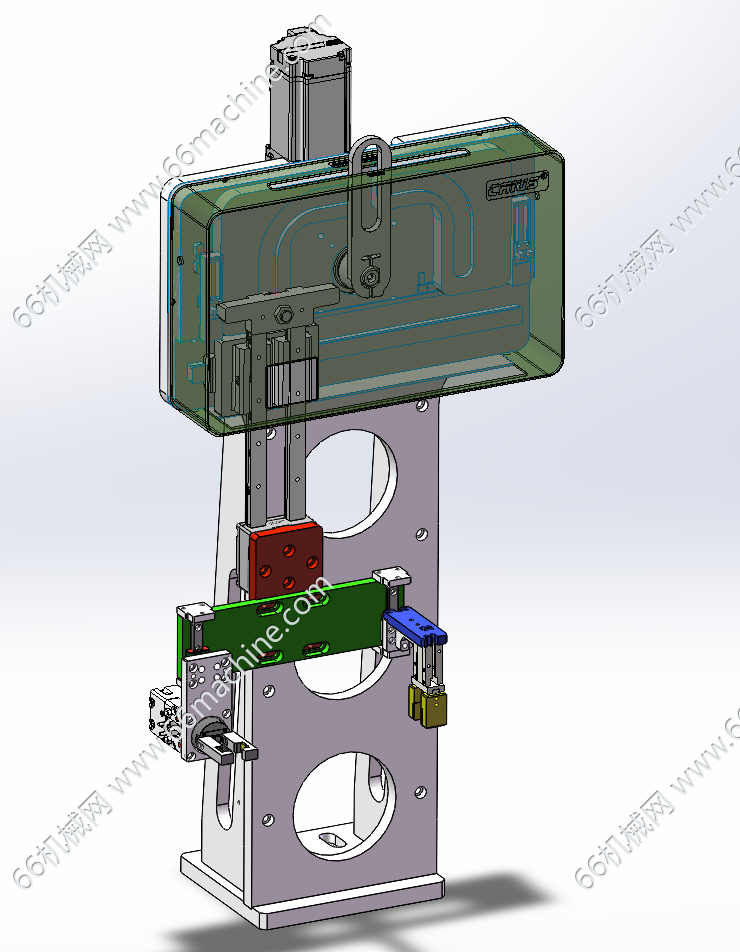
双夹爪PPU机械手.png
-
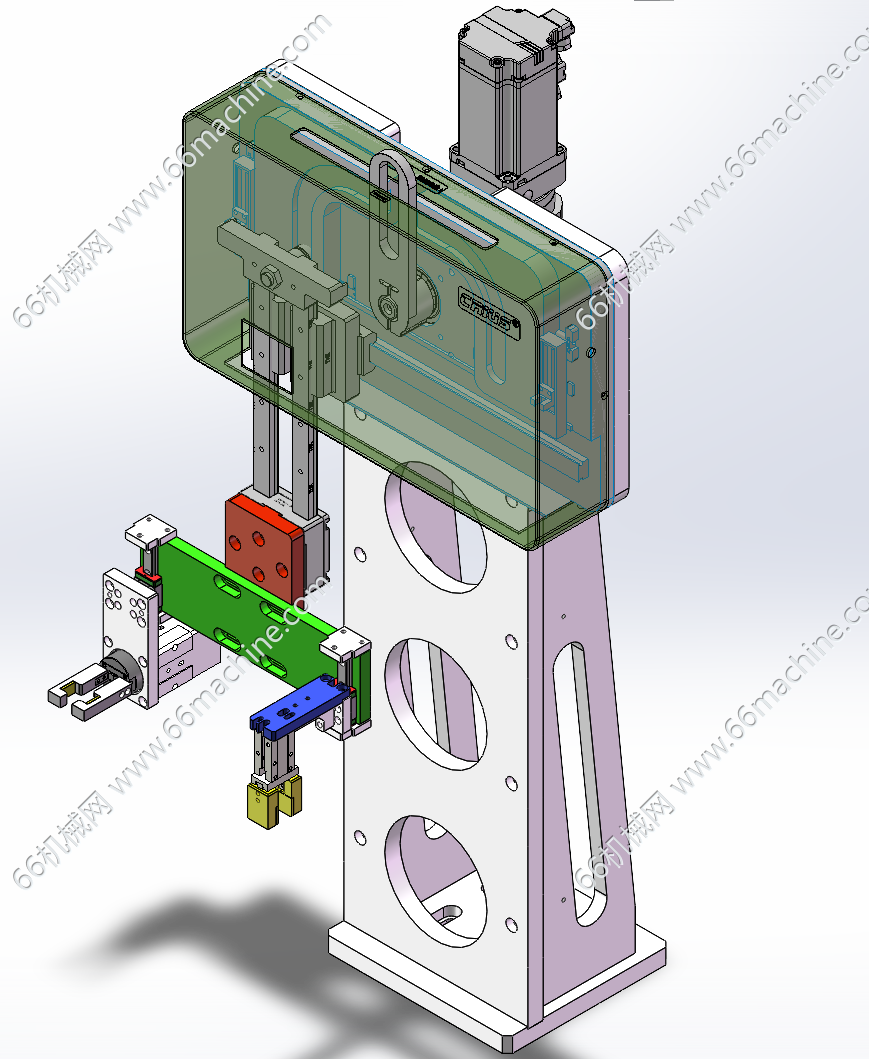
双夹爪PPU机械手轴测图.png
-
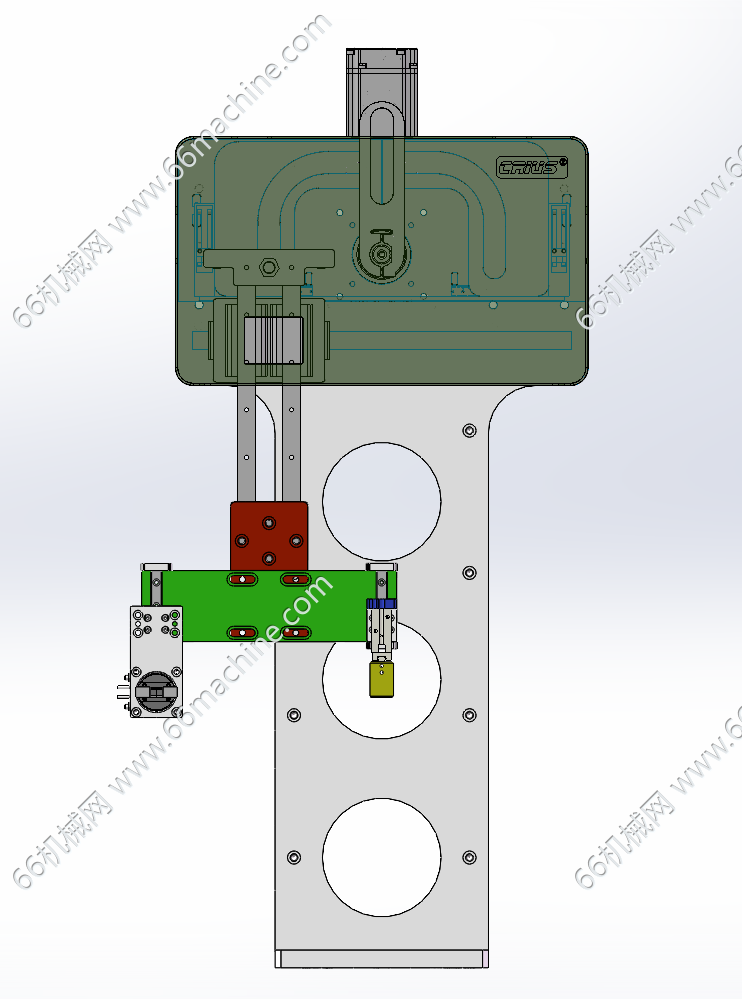
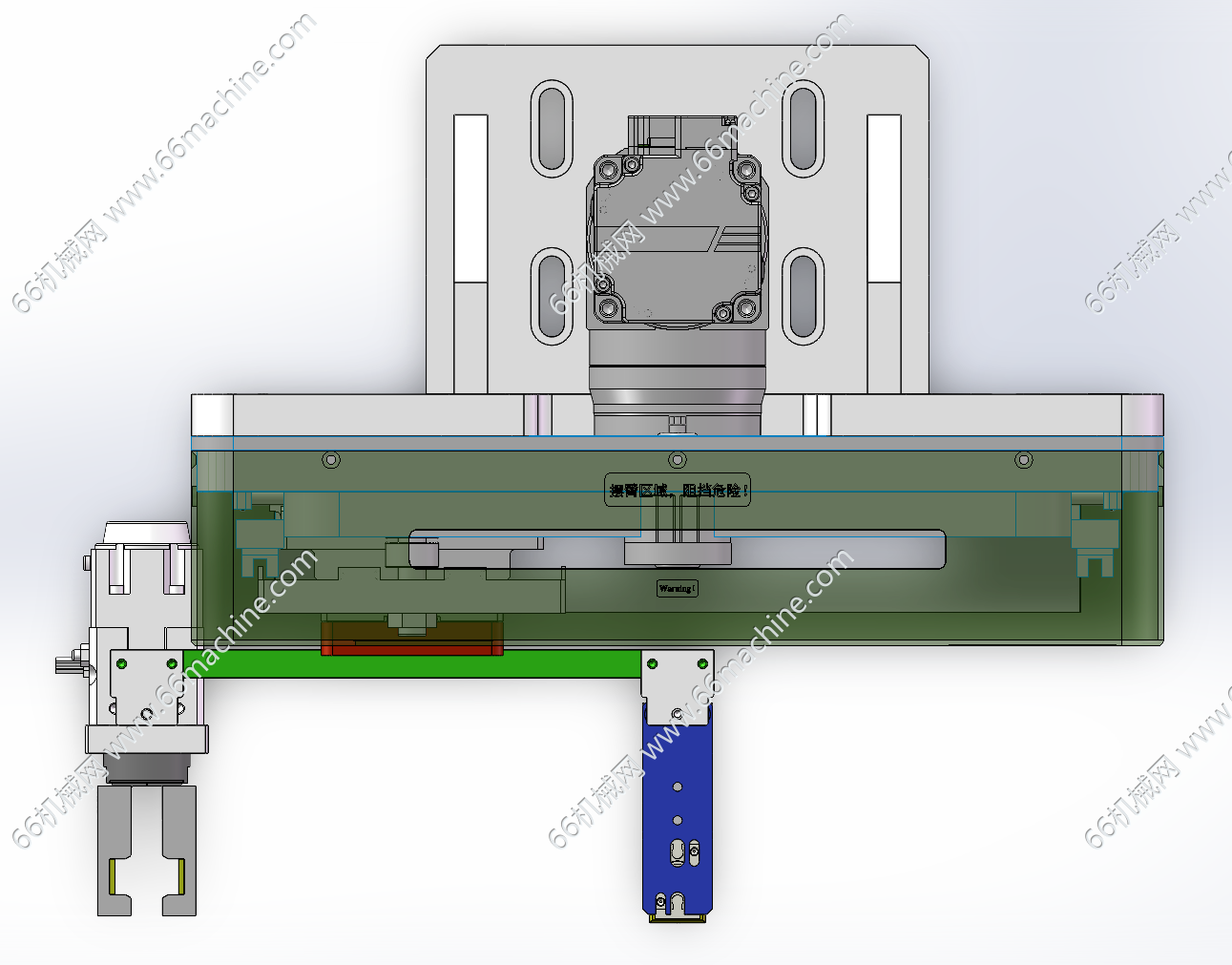
双夹爪PPU机械手主视图.png
-
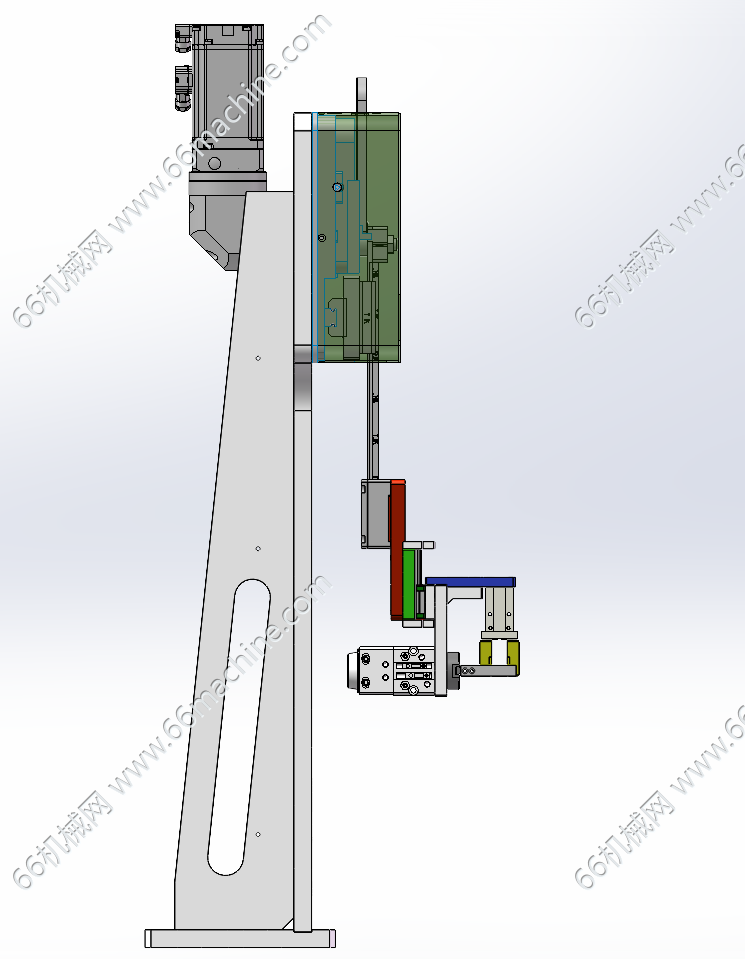
双夹爪PPU机械手侧视图.png
-
双夹爪PPU机械手俯视图.png
图纸描述
本模型为双夹爪PPU机械手,PPU:取(pick)和放(place)的单元(unit),为纯凸轮结构移栽机械手,是基于圆柱凸轮运动原理,设计凸轮滑槽,并约束在直线进给机构中,采用伺服电机驱动。具有高速稳定、结构紧凑、安装调试方便、循环时间短的特点,广泛用于自动化快速上下料中,可供大家参考!
