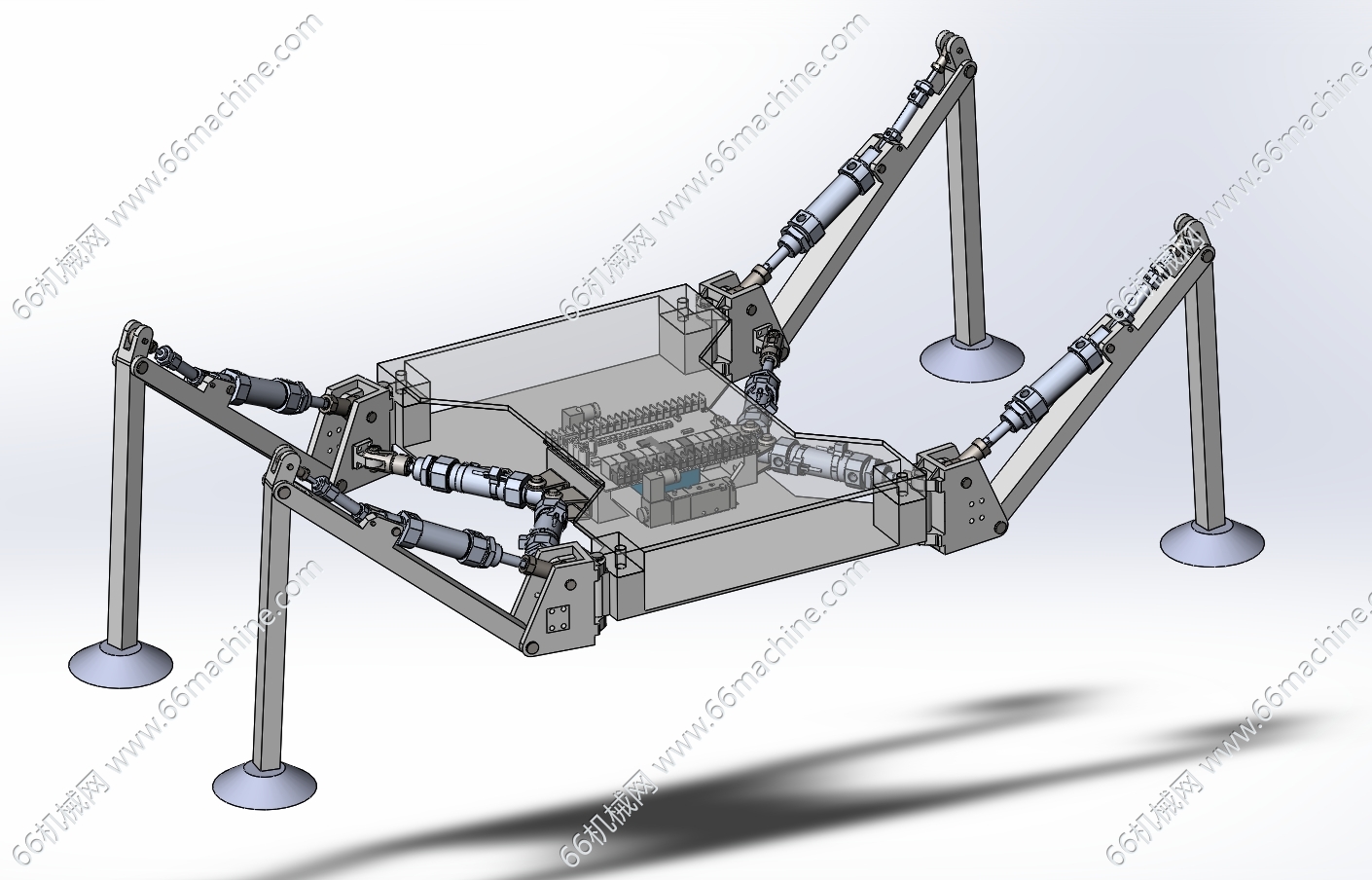
仿生四足机器人.png
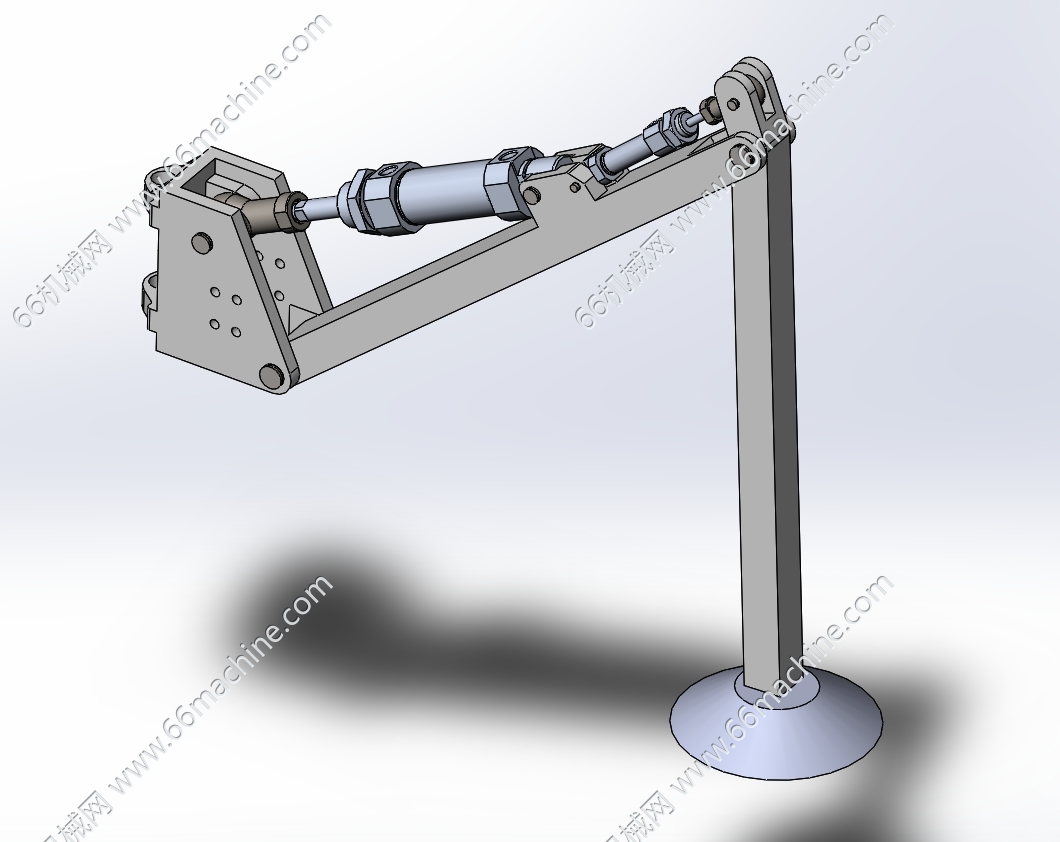
腿单元.png
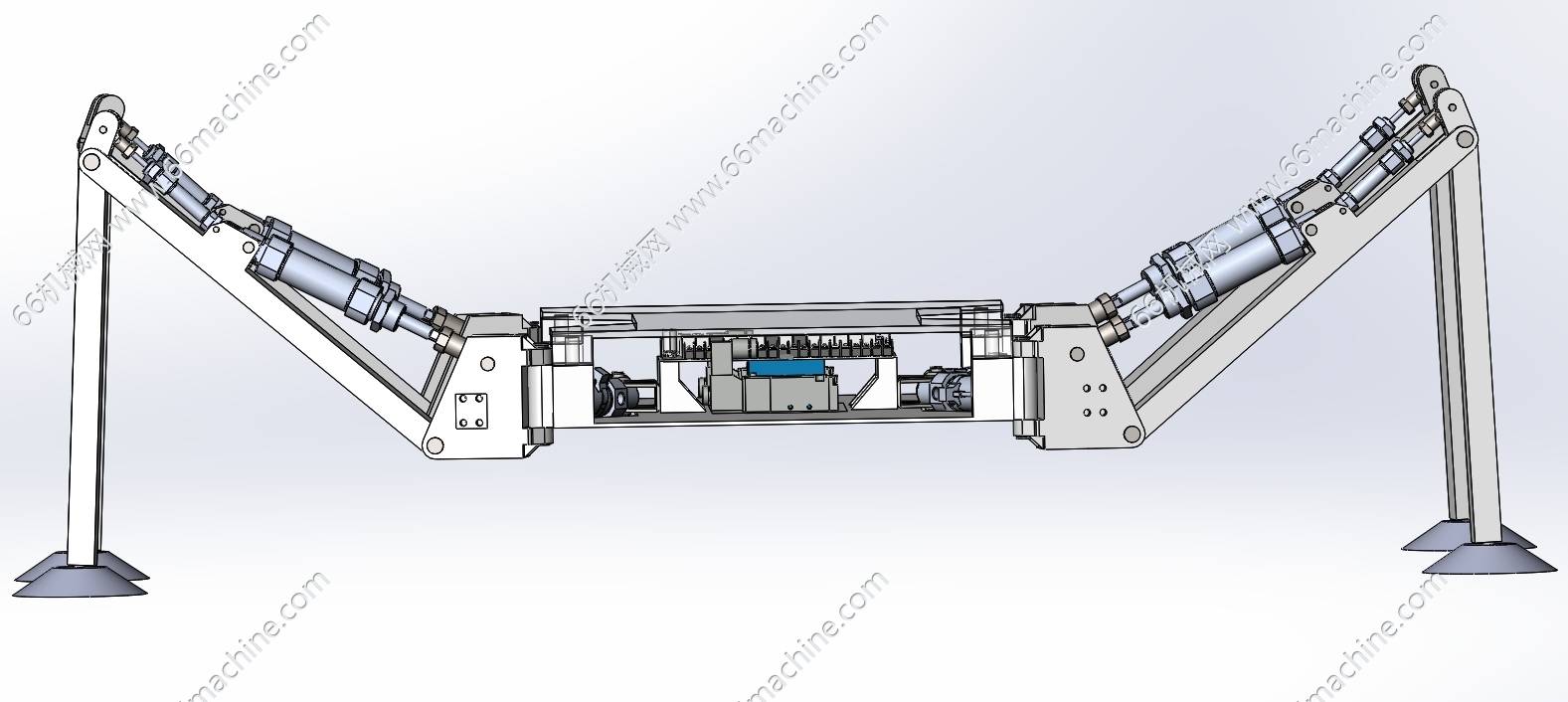
仿生四足机器人主视图.png
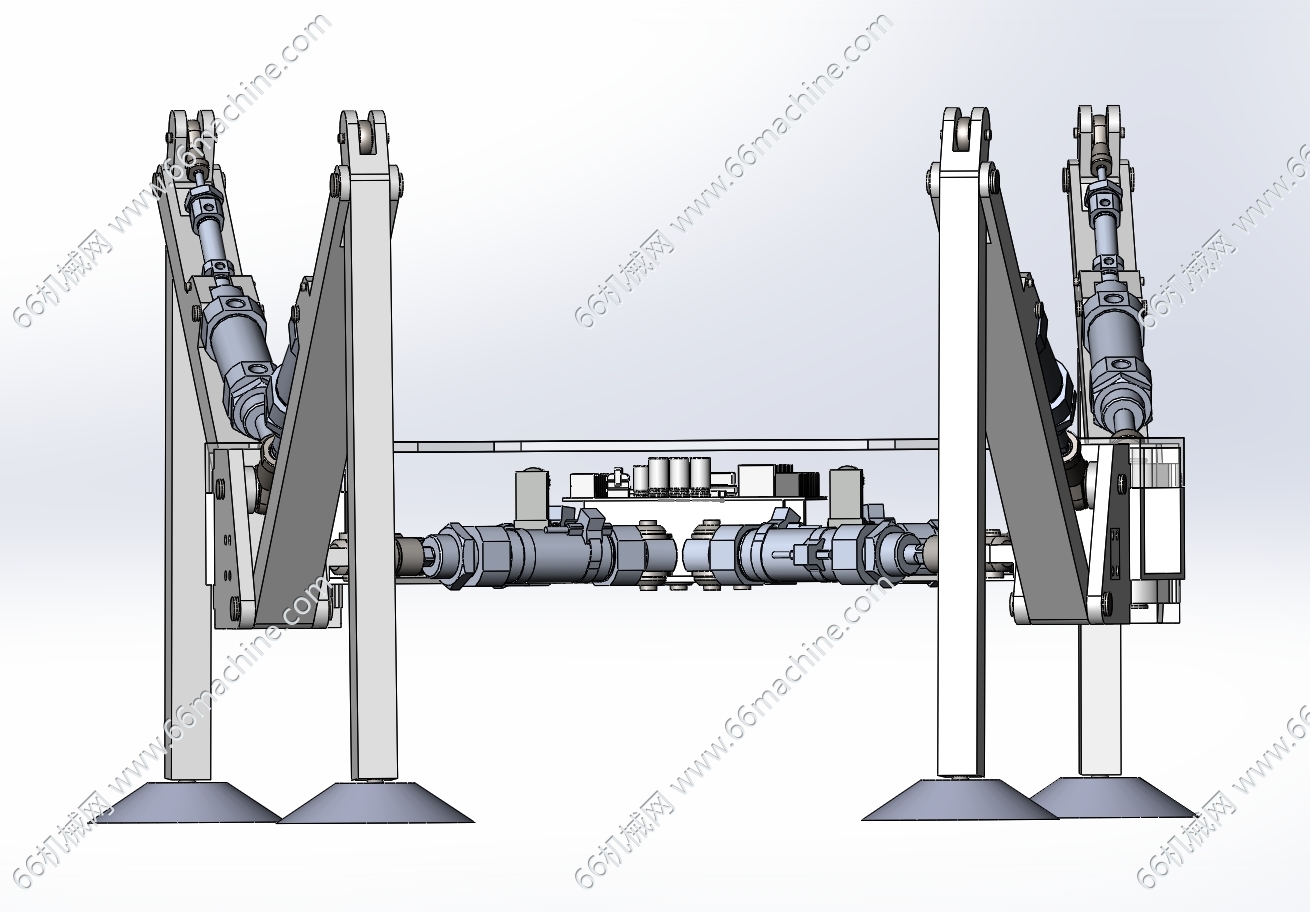
仿生四足机器人侧视图.png
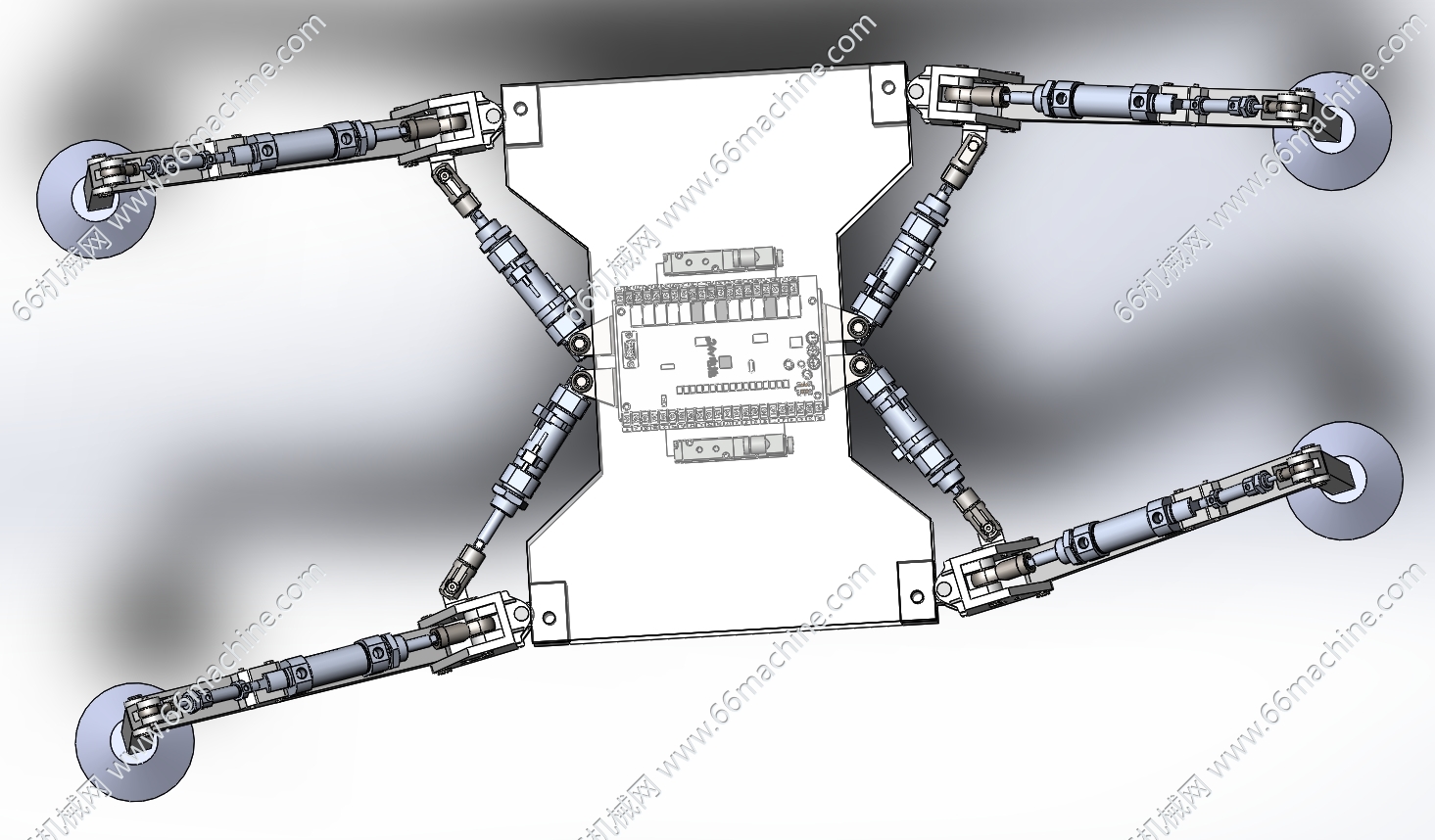
仿生四足机器人俯视图.png
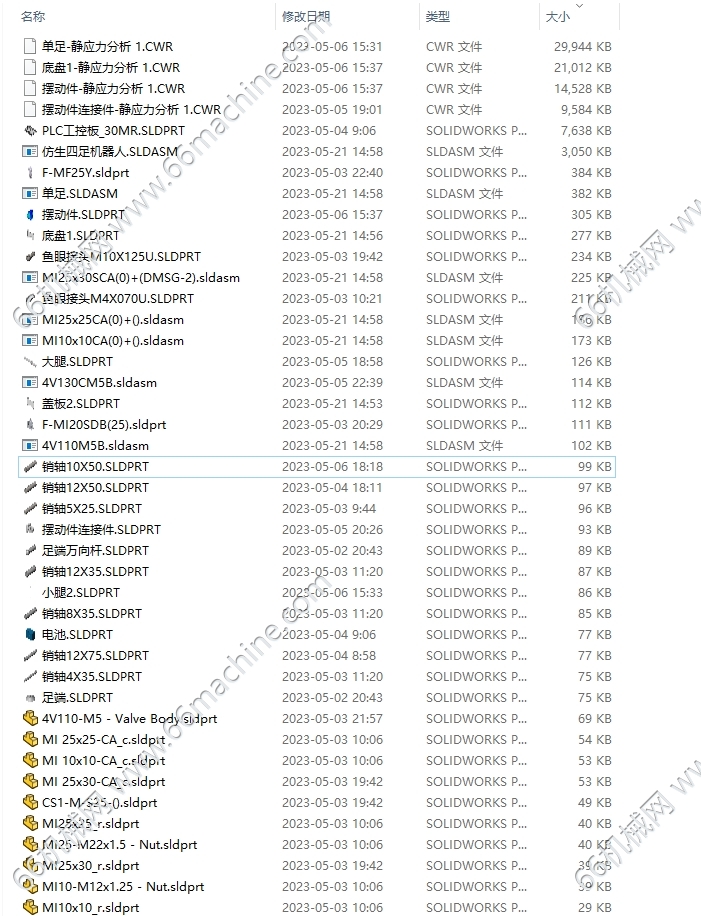
源文件及静力分析.png
仿生四足机器人是一种模仿动物四足运动机理的智能机器人,具有出色的运动灵活性和环境适应性。通过先进的传感器、驱动系统和控制算法,它能实现行走、奔跑、跳跃甚至爬坡等复杂动作,适用于复杂地形勘探、救援任务、物流运输等领域。其高动态平衡能力和节能设计,使其在军事、工业和科研领域具有广泛应用前景,代表了机器人技术的前沿发展方向。
持之以恒
图纸ID: 315092070400399404
图纸格式:sldprt、sldasm、SLDPRT、SLDASM、CWR
图纸版本:Solidworks2019
文件大小:57.94MB
所需积分:35机械币
可否编辑: 可进行编辑,包含特征参数
关注人数:0人