带钻头及夹爪的蛇形机器人3D+工程图
发布时间:2025-07-10
-
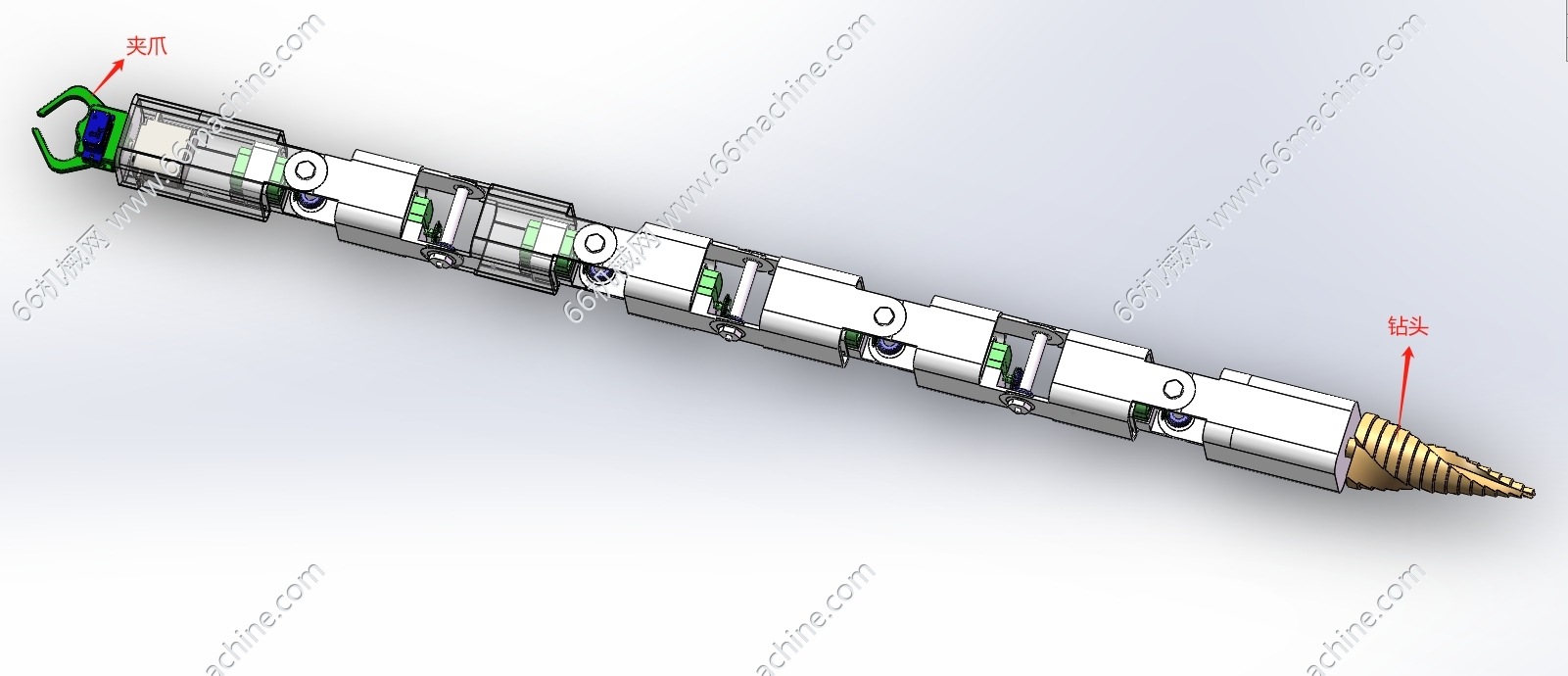
带钻头及夹爪的蛇形机器人.png
-
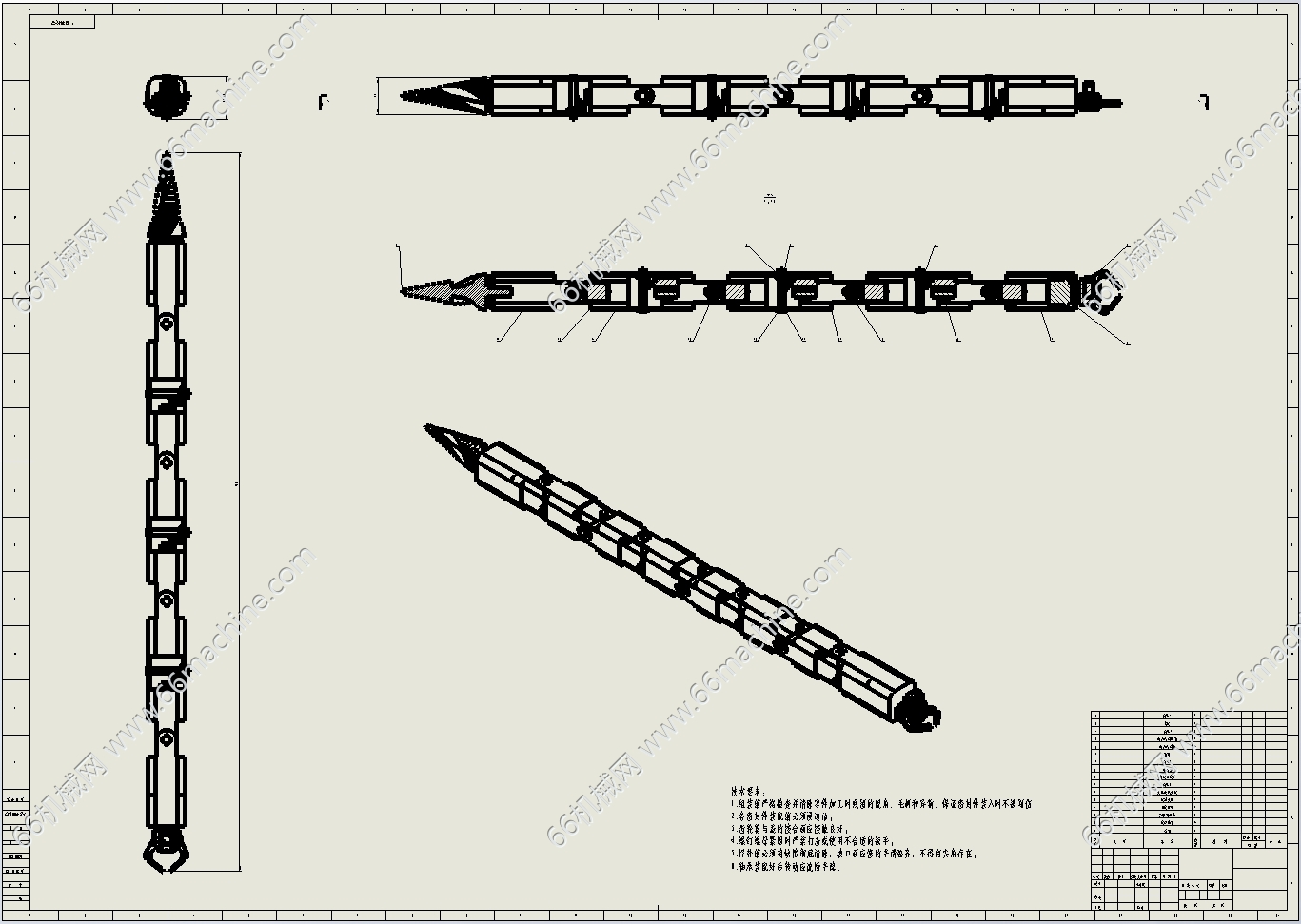
带钻头及夹爪的蛇形机器人工程图.png
-
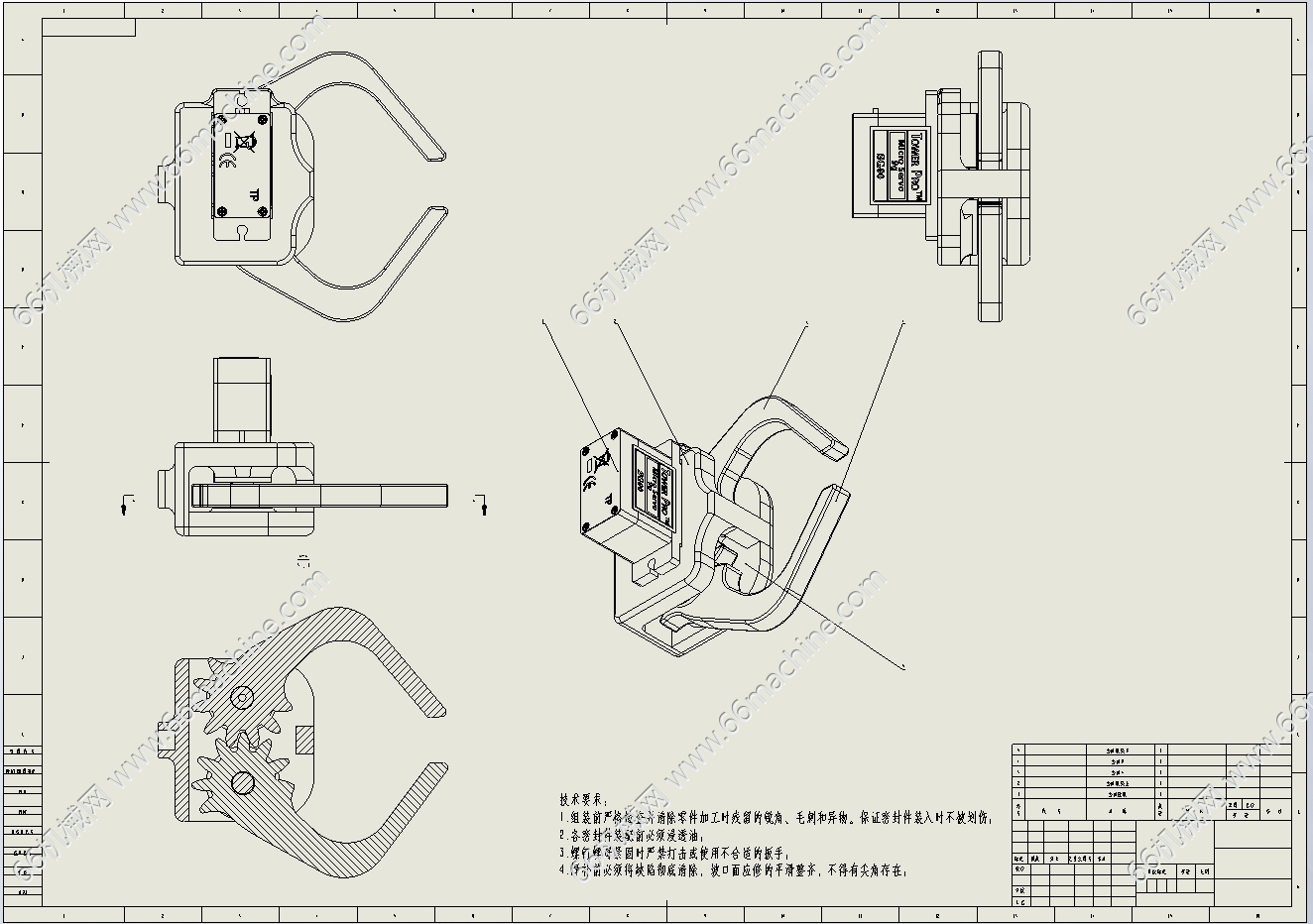
夹爪工程图.png
-
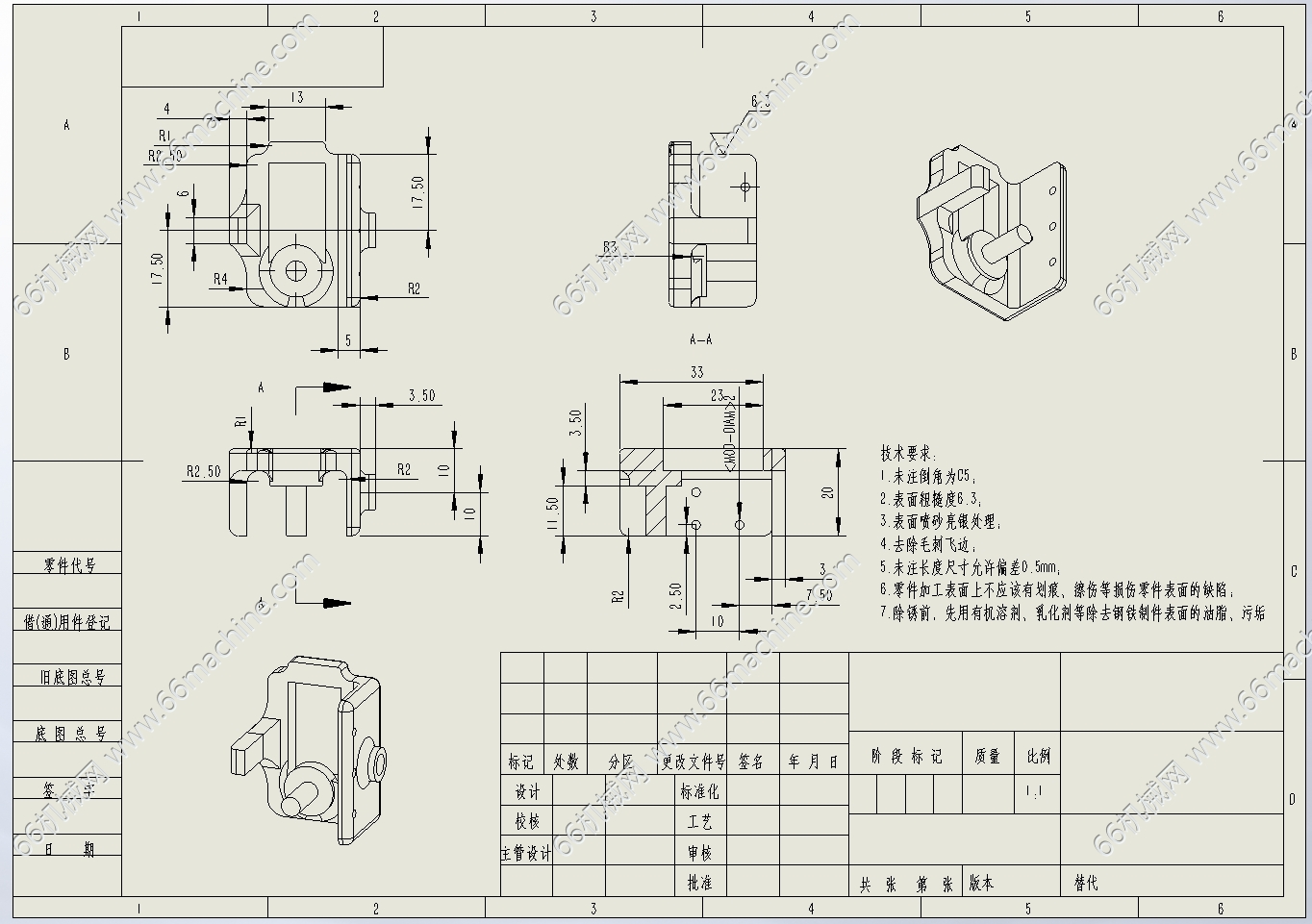
夹爪固定座上.png
-
源文件.png
-
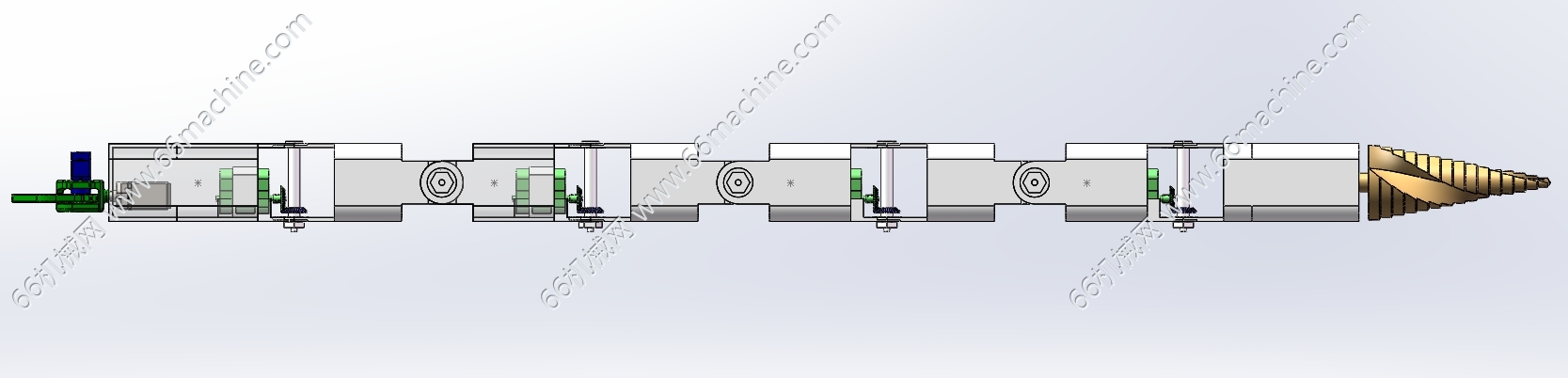
带钻头及夹爪的蛇形机器人主视图.png
-
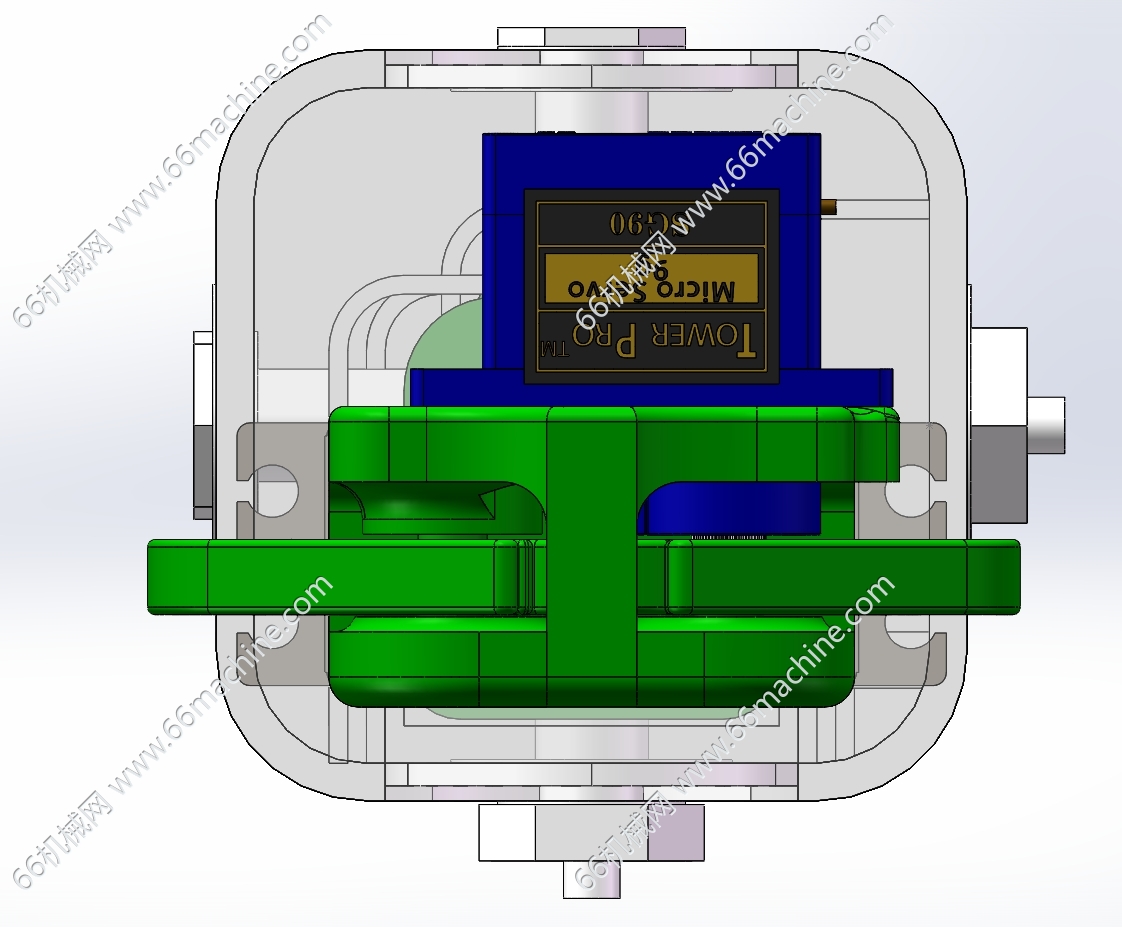
带钻头及夹爪的蛇形机器人侧视图.png
-
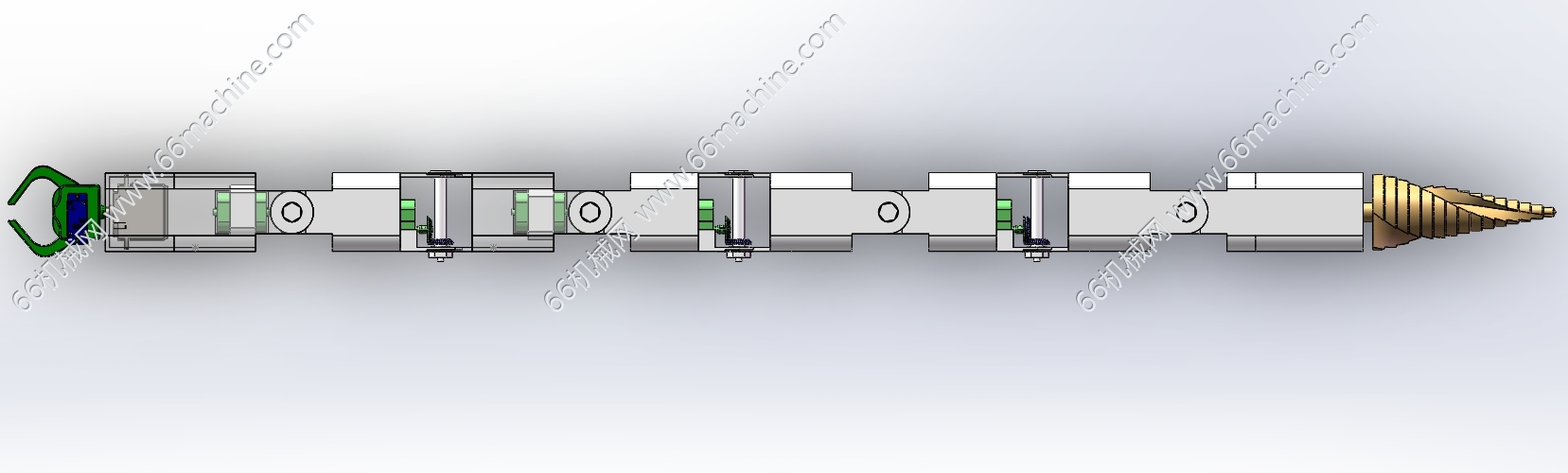
带钻头及夹爪的蛇形机器人俯视图.png
图纸描述
本模型为带钻头及夹爪的蛇形机器人,1、采用模块化关节:串联多个刚性单元,各含双舵机(±90°俯仰/偏航)实现3D运动。2.驱动方式:直流伺服电机+谐波减速器,扭矩≥5N•m,IP65防护。3.联动控制:基于ROS的CPG(中枢模式发生器)算法协调关节波浪运动。4.功能集成:头部搭载双目视觉/LiDAR,关节间走线内置;硅胶鳞片增强地面摩擦。本蛇形机器人适应管道/废墟等非结构化地形,运动模式可切换(侧移、攀爬、缠绕)。欢迎下载参考!
