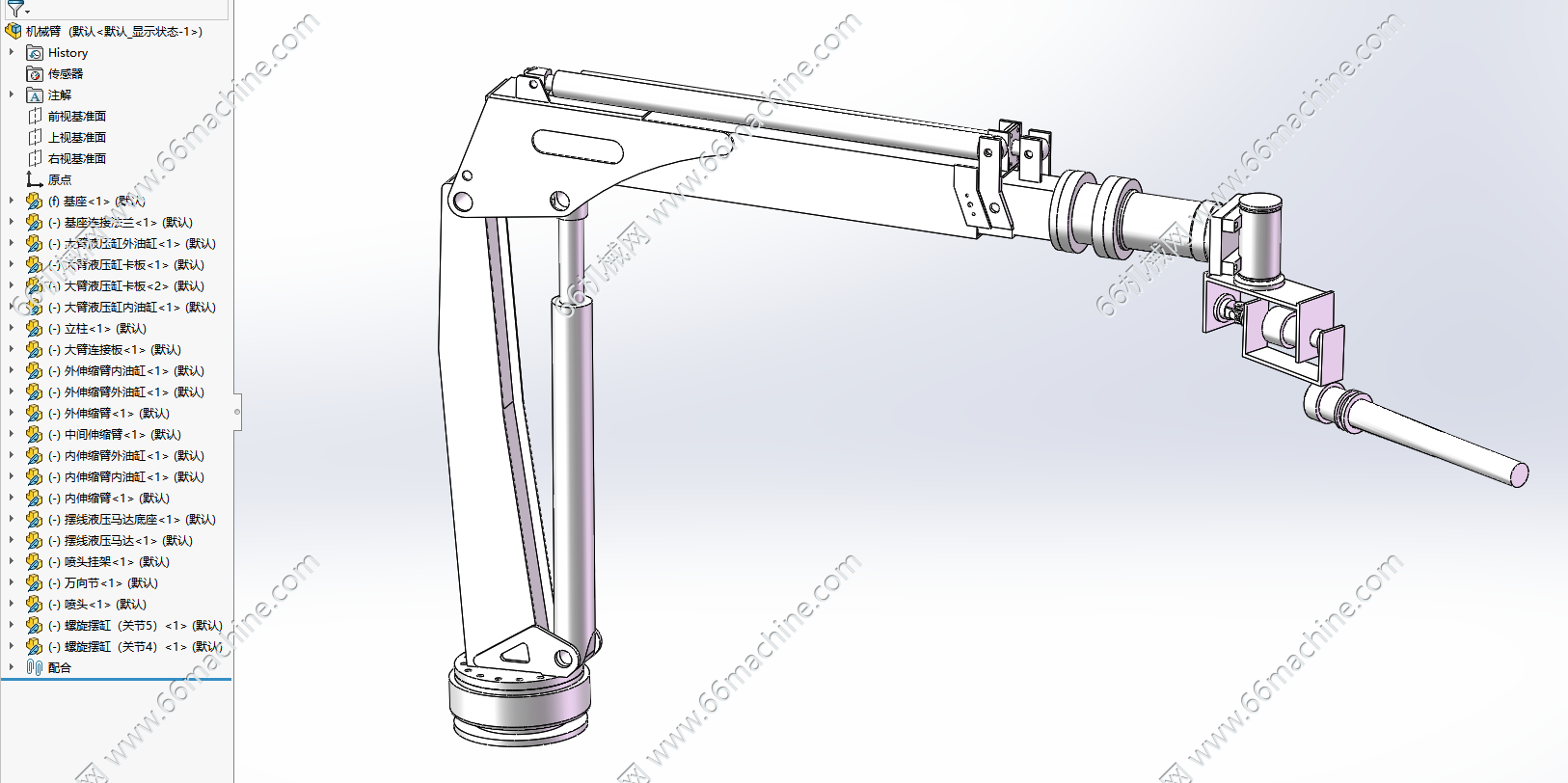
六自由度串联液压机械臂.png
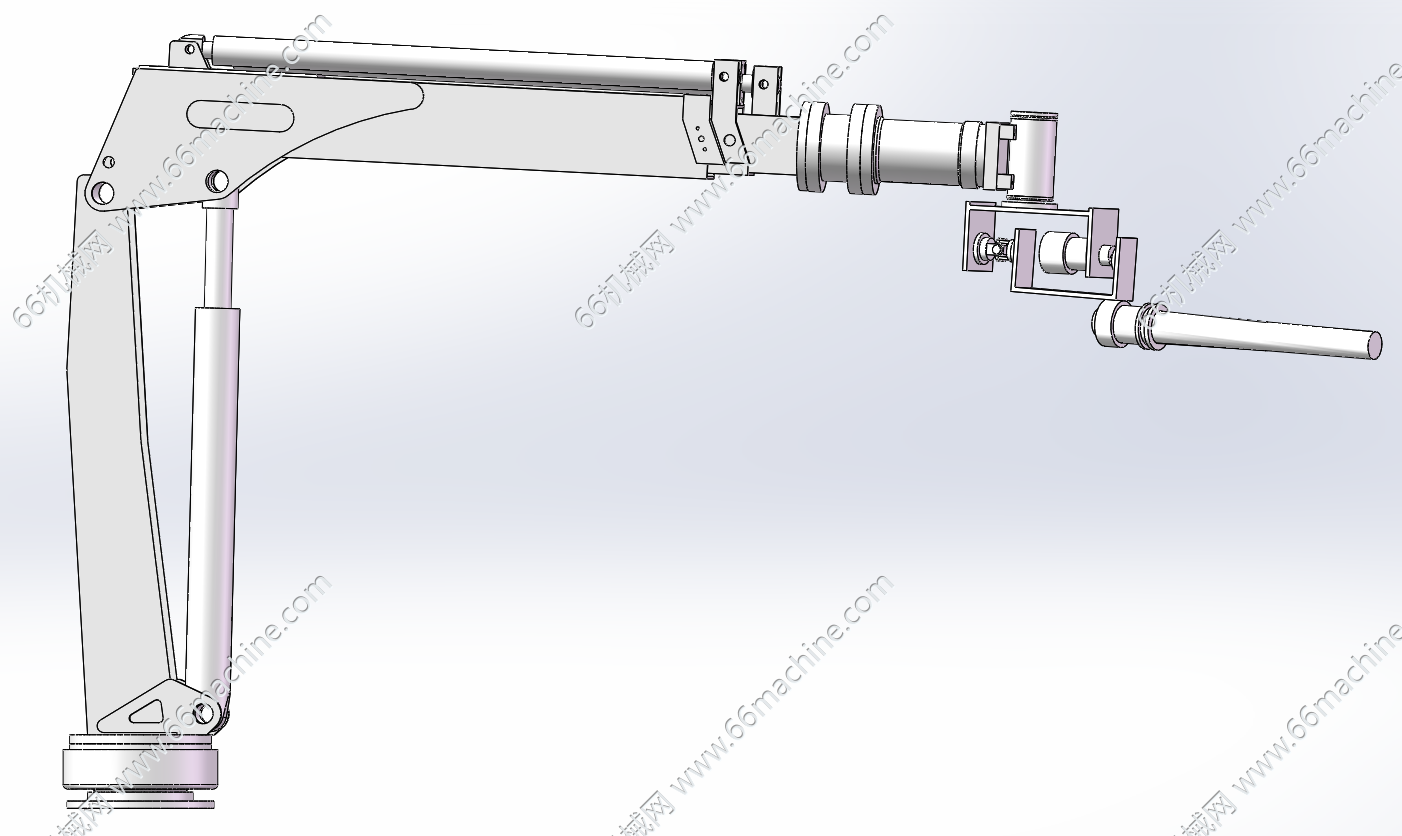
六自由度串联液压机械臂主视图.png
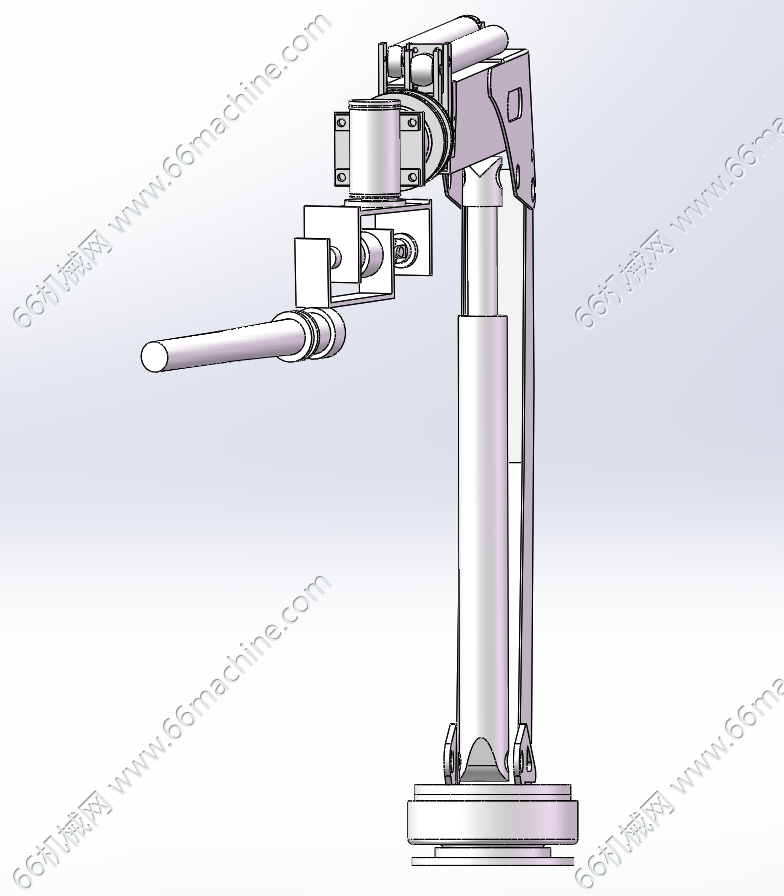
六自由度串联液压机械臂侧视图.png
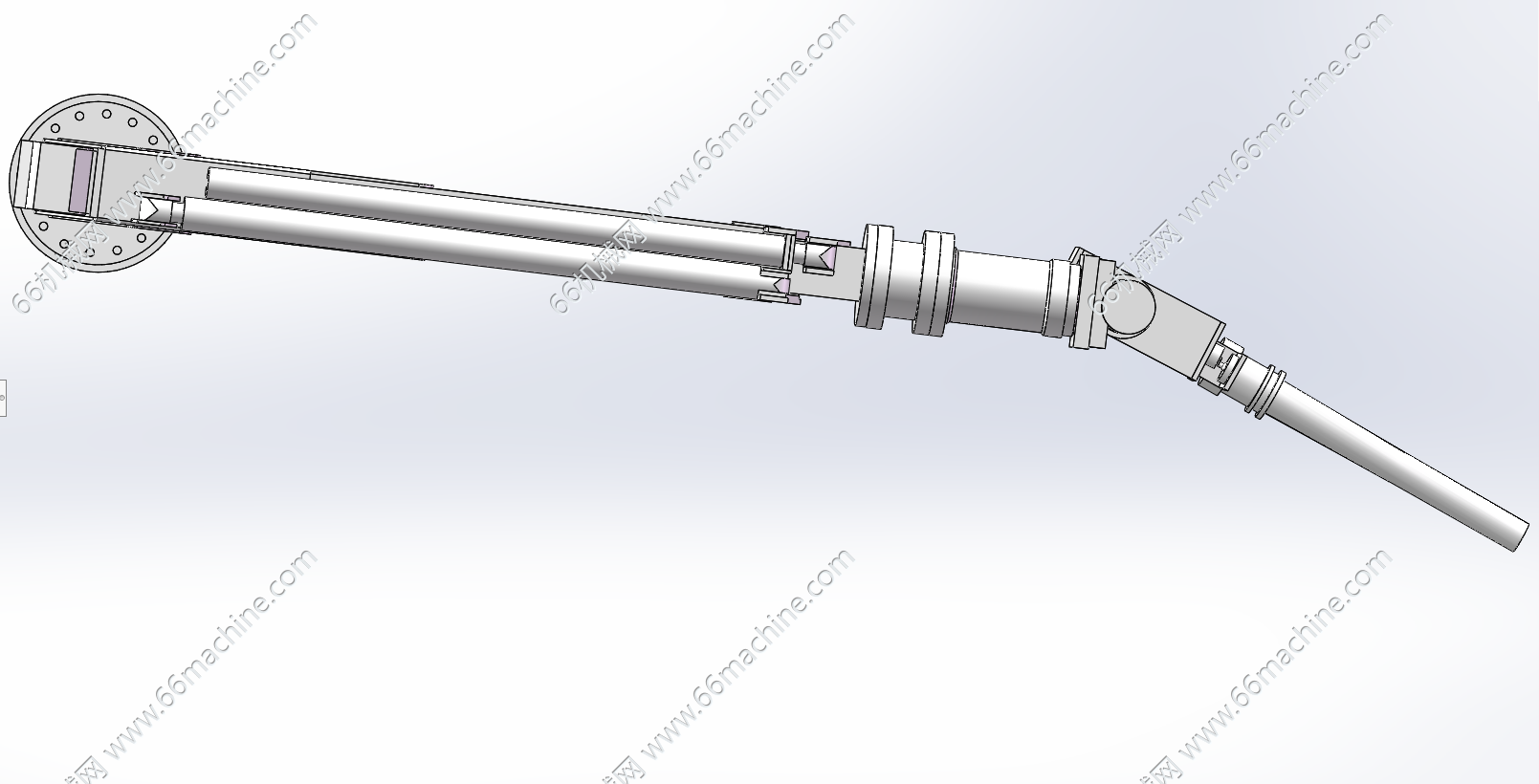
六自由度串联液压机械臂俯视图.png
源文件.png
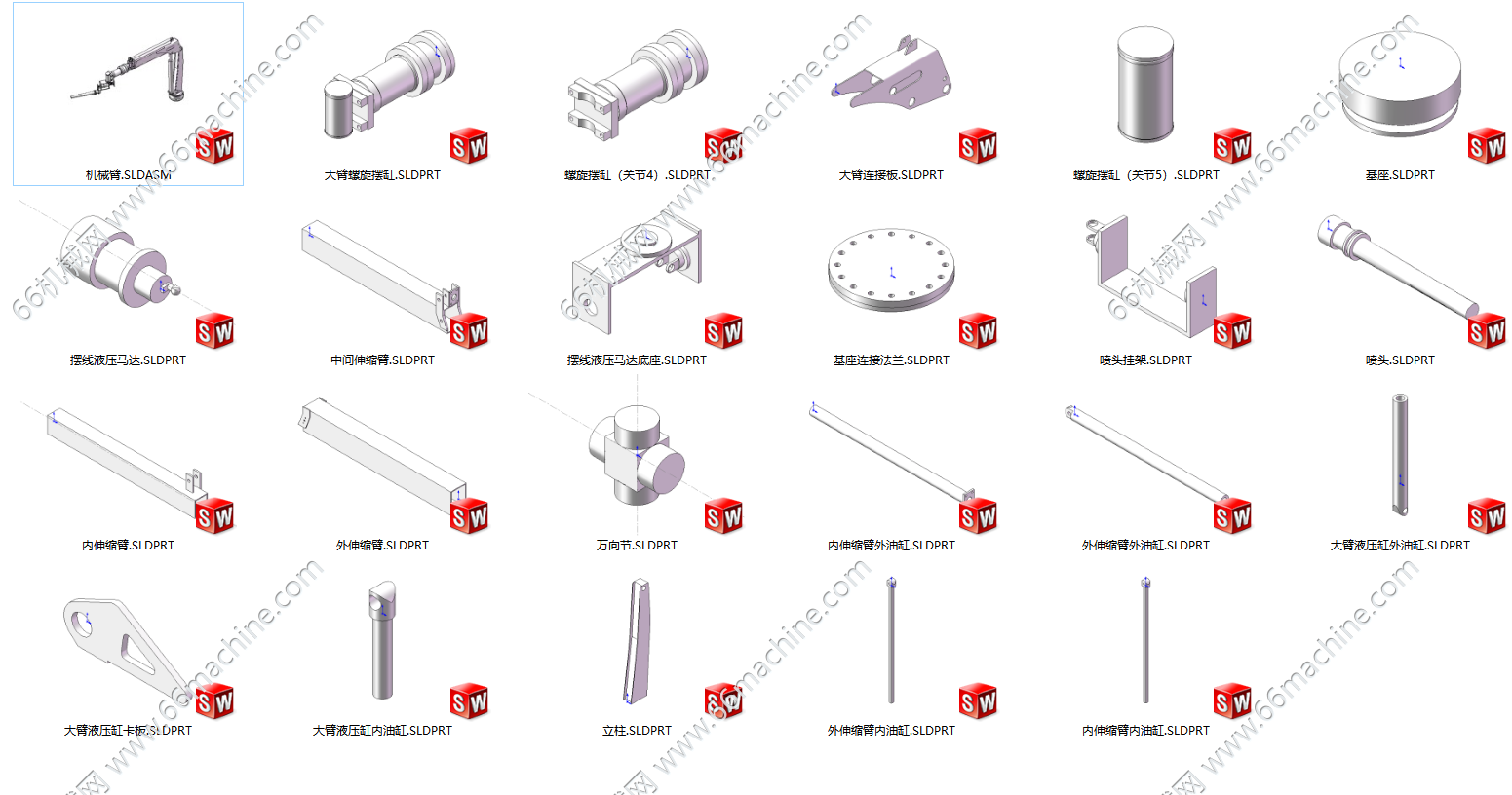
机械臂采用阀控液压执行器作为驱动单元,其中机械臂第2、3关节需要支撑较大的负载,采用阀控单伸出直线液压缸,与连杆机构协同作用实现关节移动和旋转;机械臂第1、4、5、6关节采用旋转液压缸作为驱动,实现关节旋转。
持之以恒
图纸ID: 315092070400397458
图纸格式:SLDPRT、SLDASM
图纸版本:Solidworks2020
文件大小:2.45MB
所需积分:20机械币
可否编辑: 可进行编辑,包含特征参数
关注人数:0人