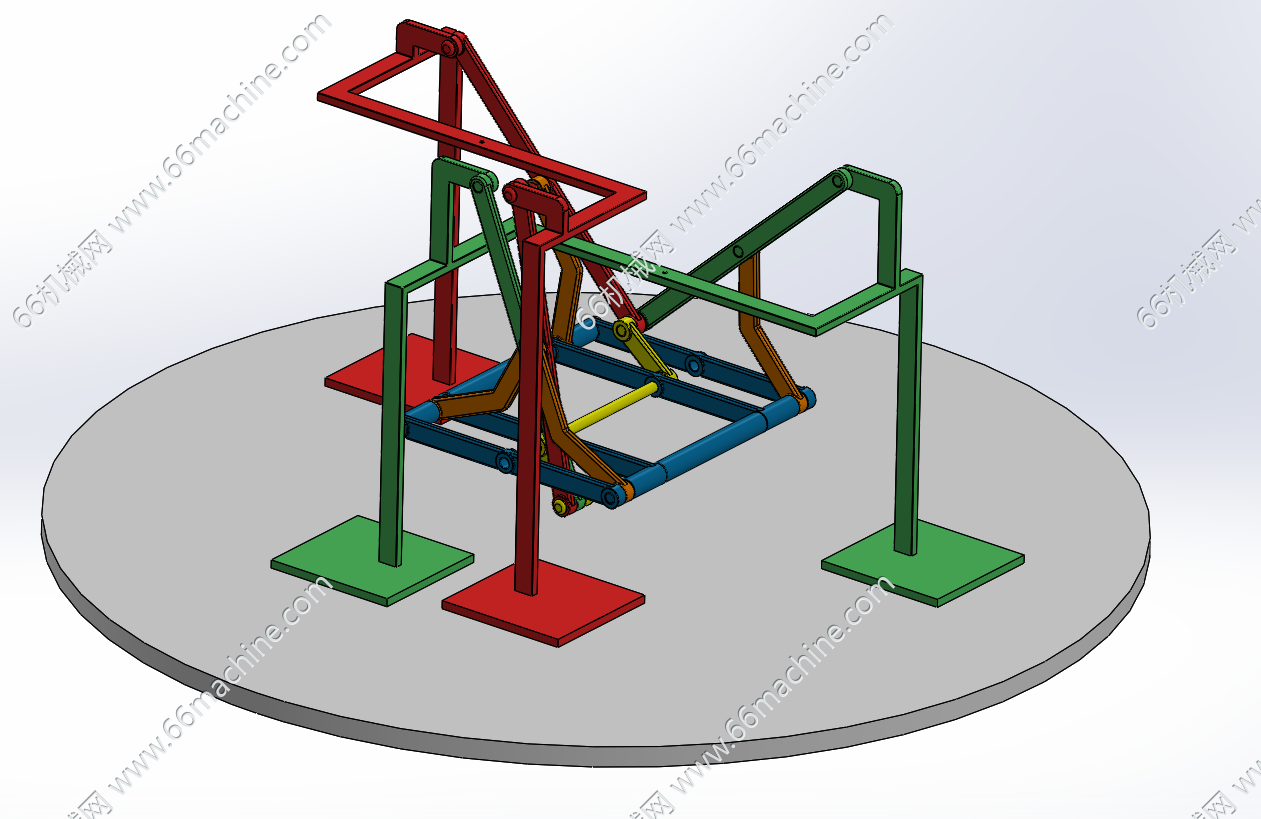
契贝谢夫步行机.png
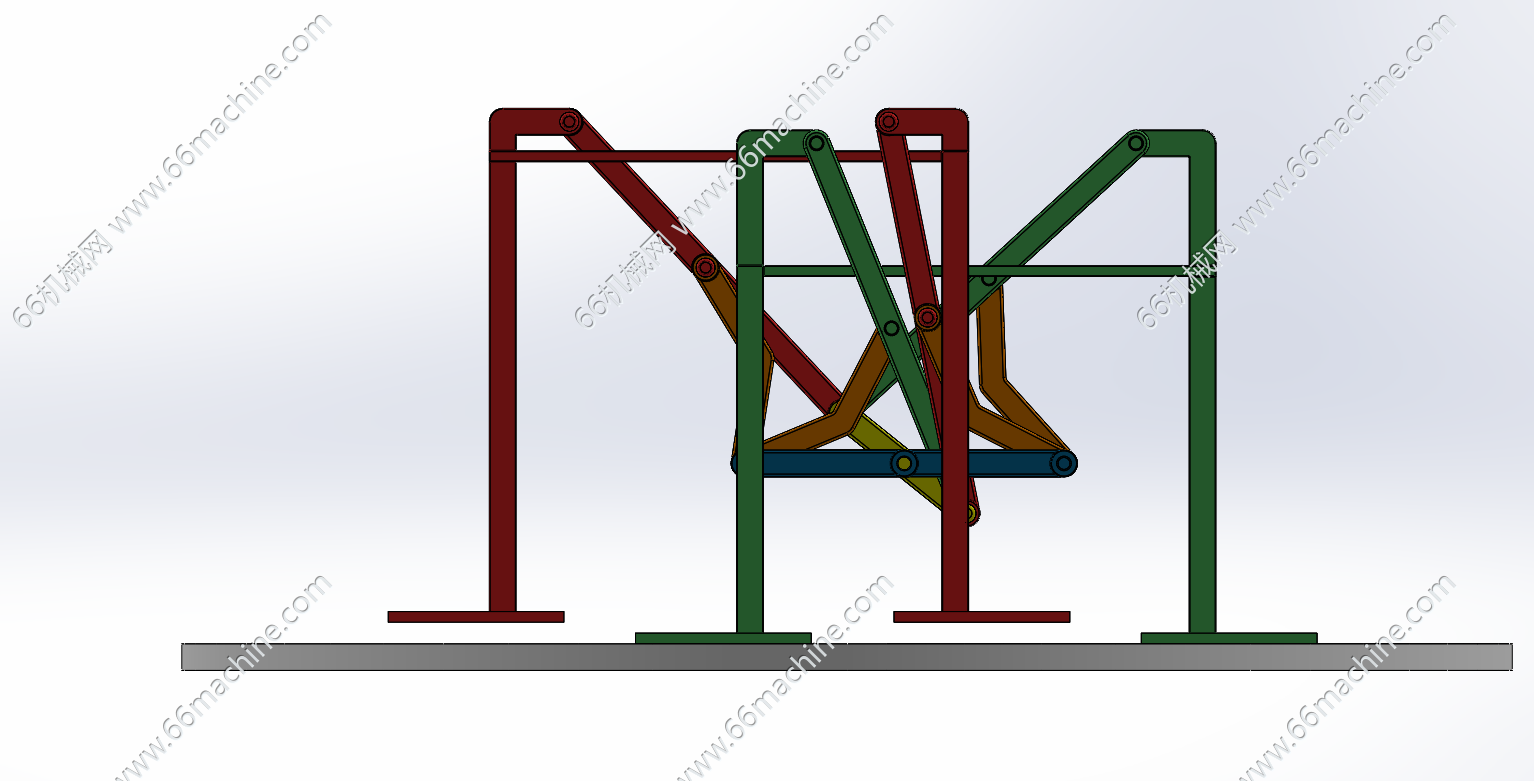
契贝谢夫步行机主视图.png
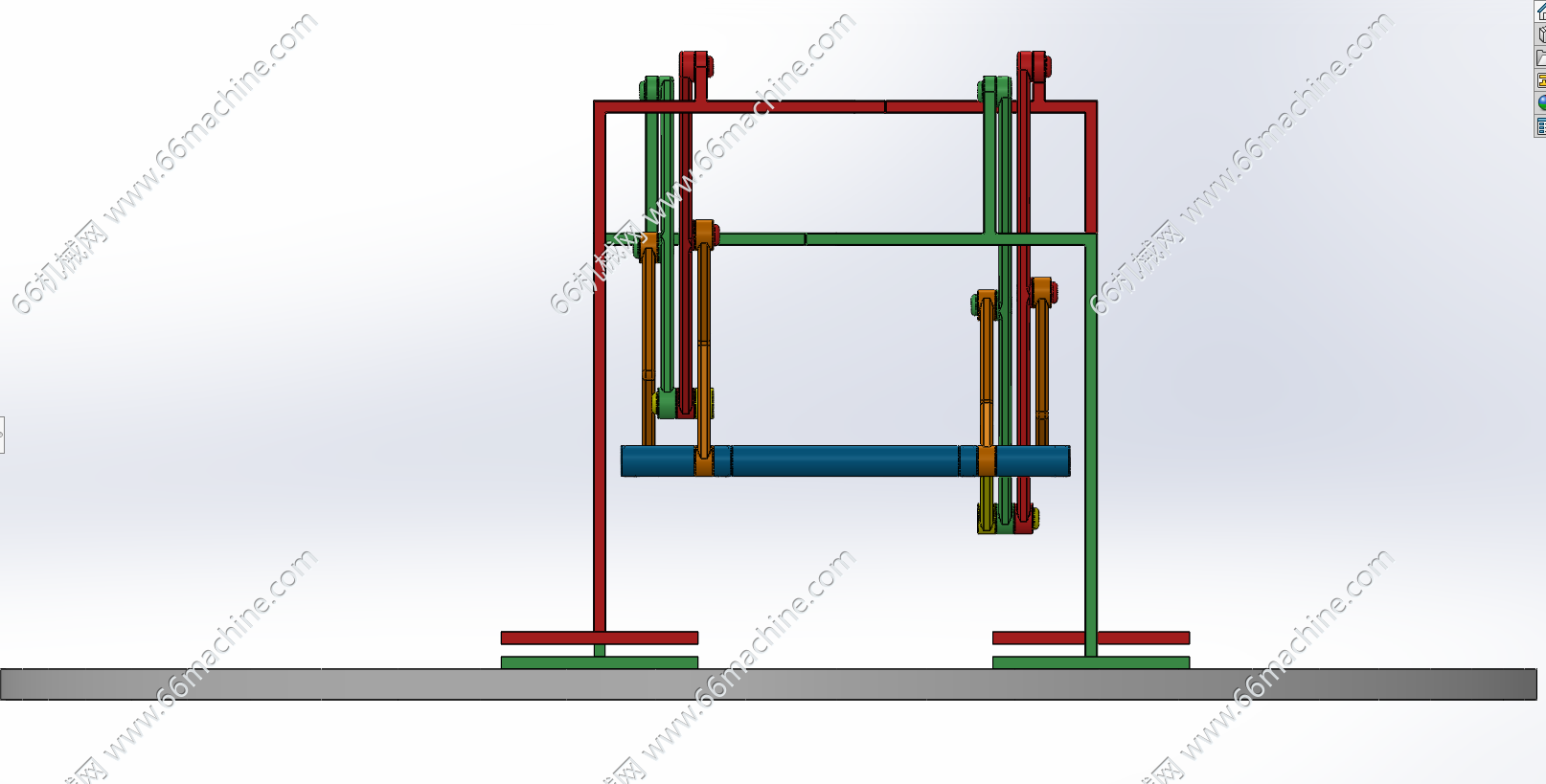
契贝谢夫步行机侧视图.png
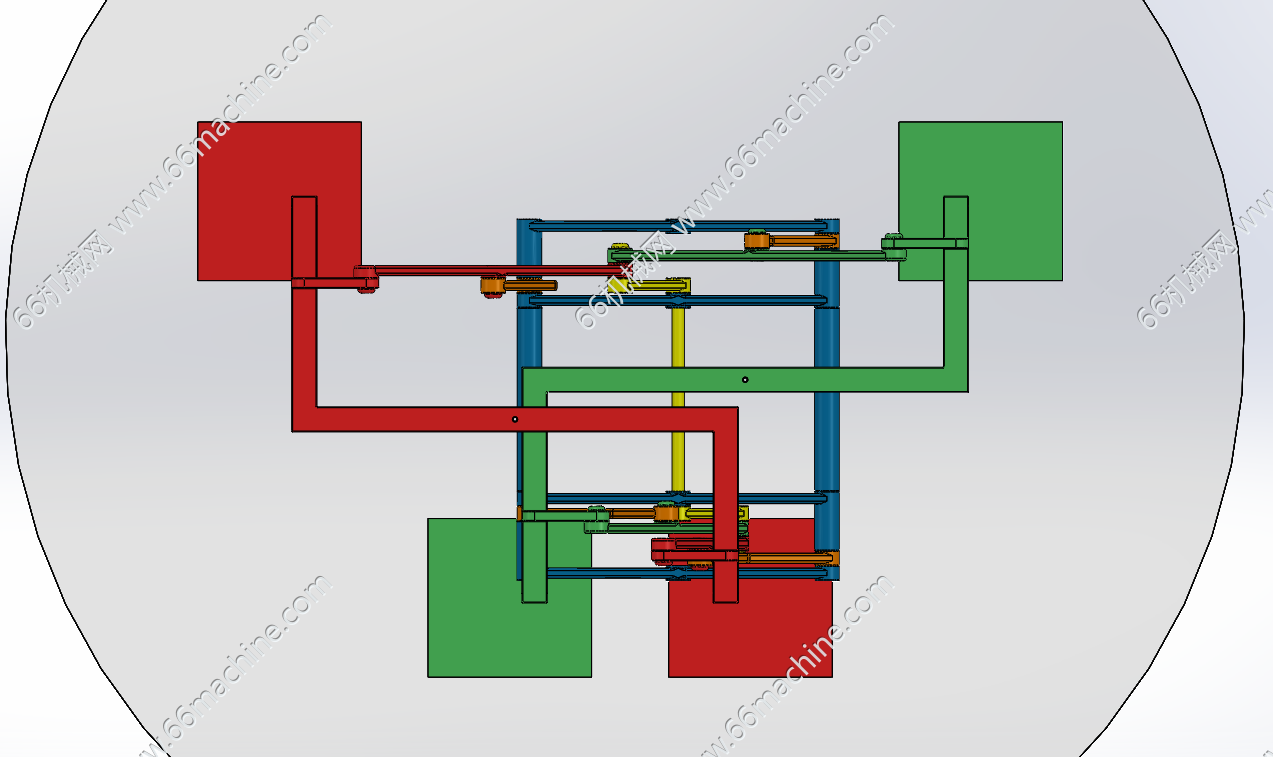
契贝谢夫步行机俯视图.png
契贝谢夫步行机的核心是契贝谢夫四杆机构,是一种基于连杆机构模拟动物行走的机械装置。其从动杆端点可画出包含直线段的闭合轨迹。当主动杆(原动节)旋转时,从动杆端点在直线段内实现“着地支撑”,在曲线段完成“抬腿迈步”,形成周期性行走动作。为保持足端与地面平行,通常搭配平行四边形机构,确保行走时机身水平稳。
持之以恒
图纸ID: 315092070400397377
图纸格式:prt、msg、rad、rmd、rplt、sim、X_T
图纸版本:NX 1847
文件大小:3.67MB
所需积分:10机械币
可否编辑: 可进行编辑,不包含参数
关注人数:0人