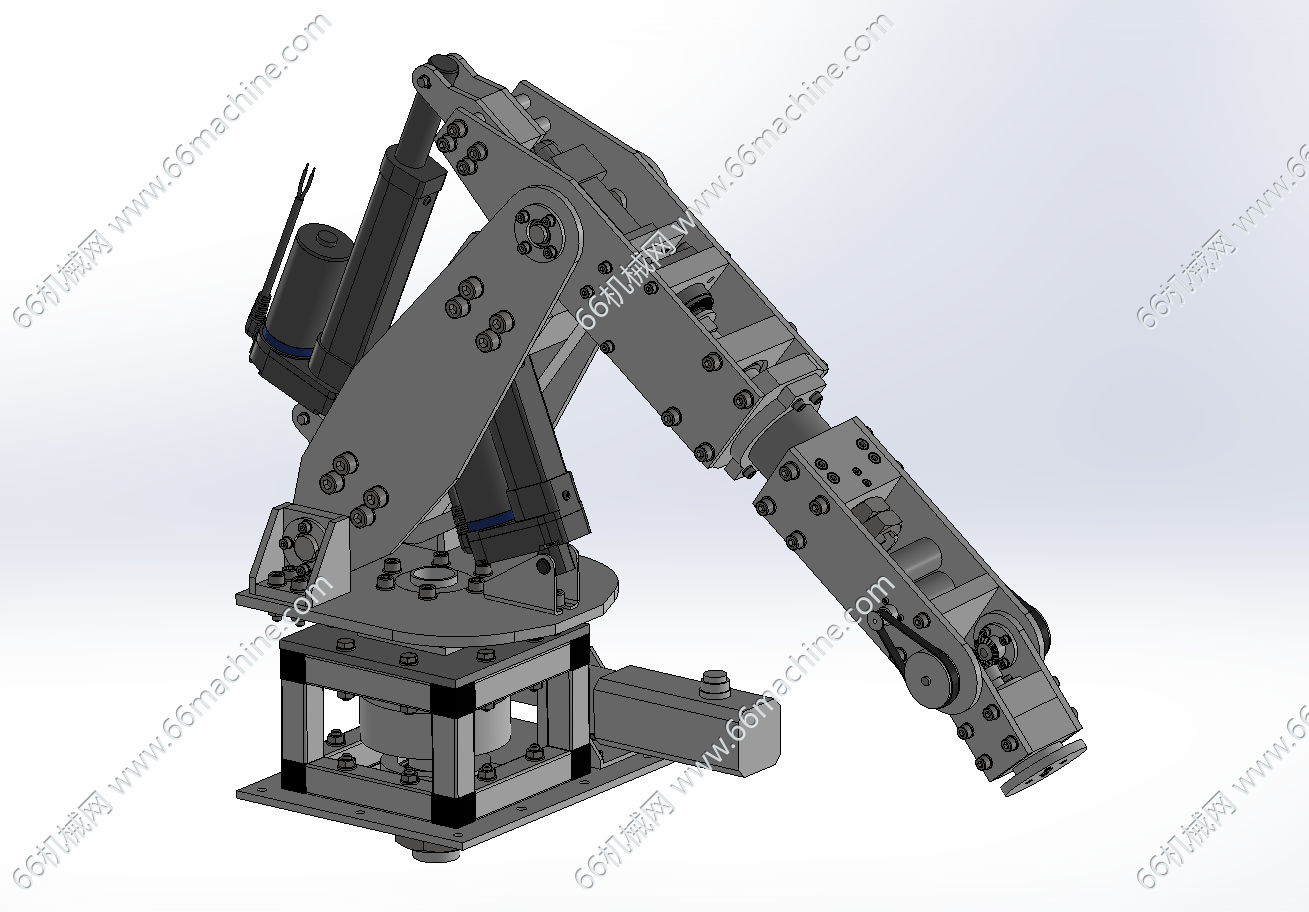
6自由度机器人手臂.png
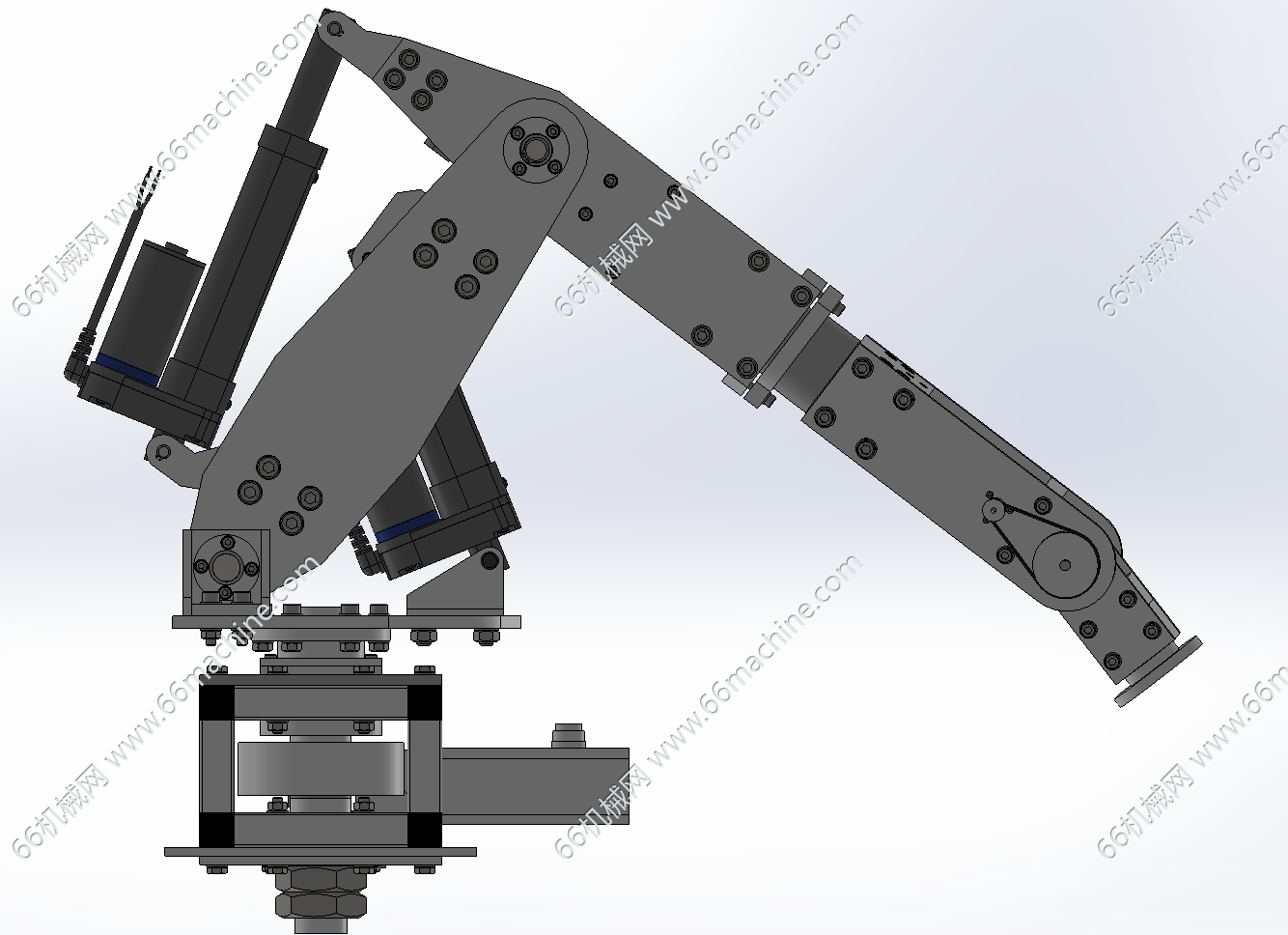
6自由度机器人手臂主视图.png
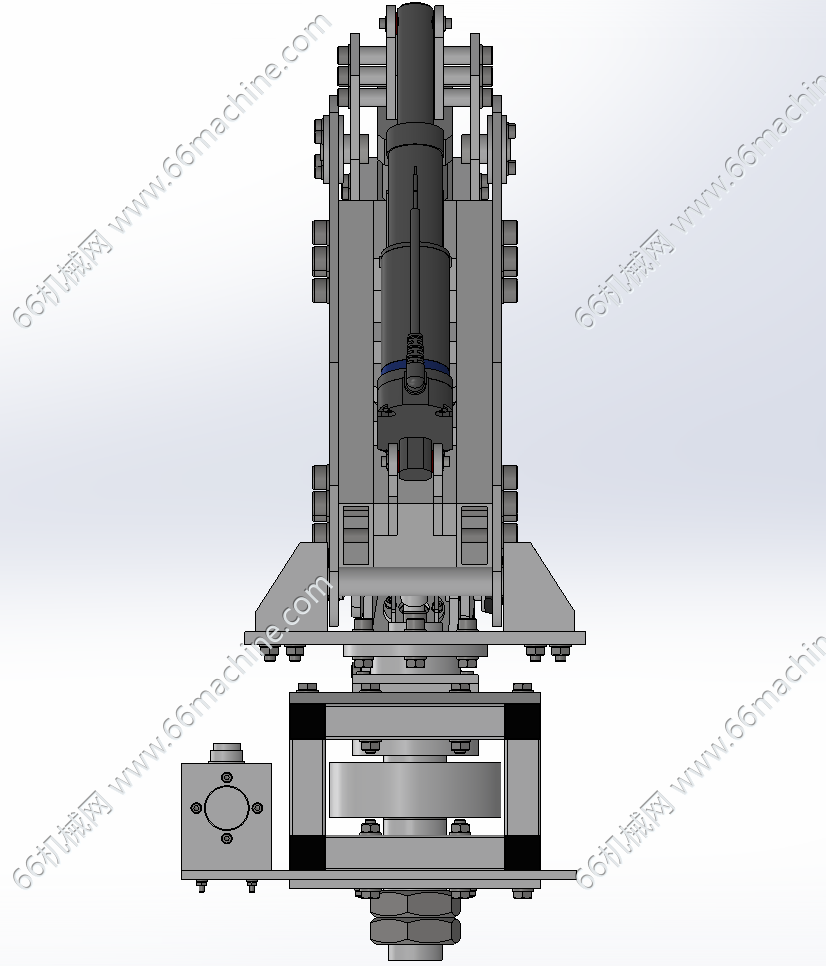
6自由度机器人手臂侧视图.png
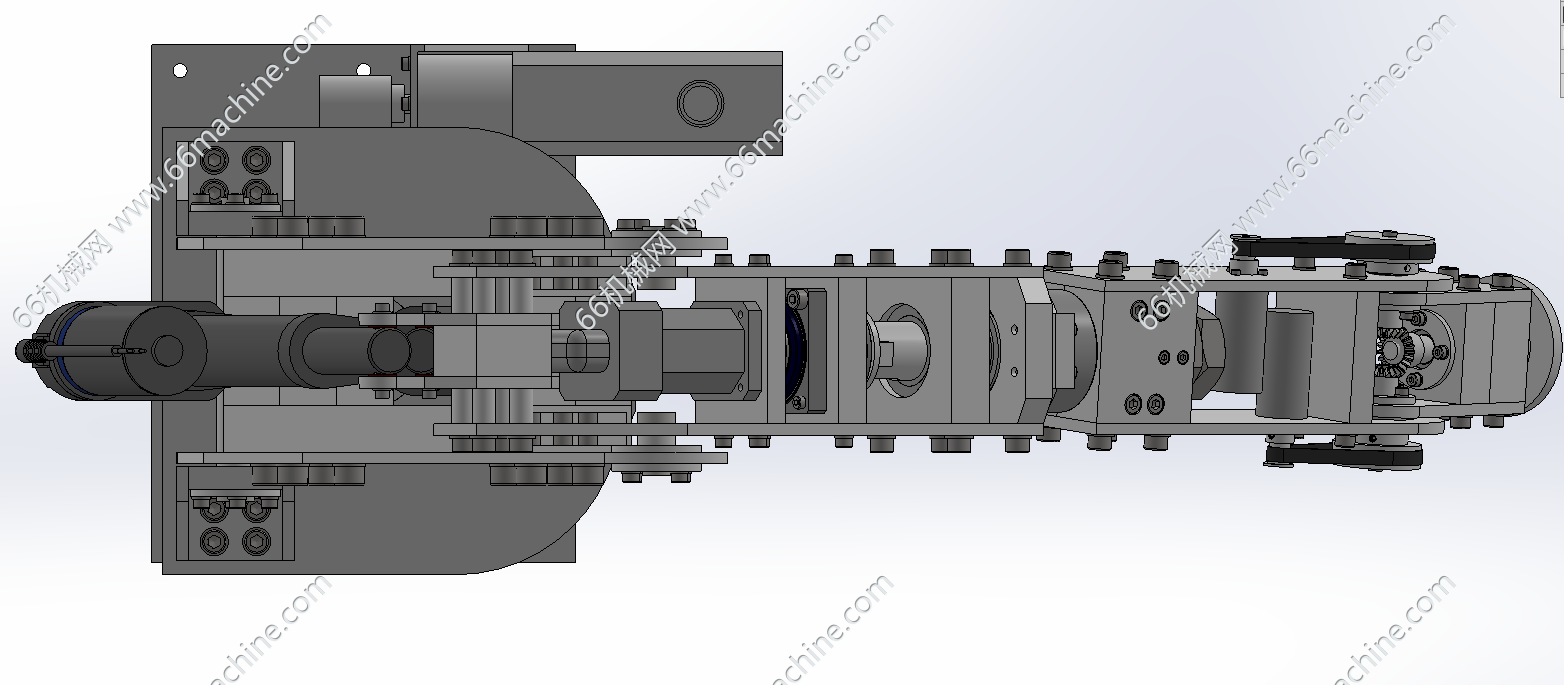
6自由度机器人手臂俯视图.png
本模型为6自由度机器人手臂,拥有六个可独立运动的旋转关节。这六个关节共同构成了一个完整的空间运动链,使其末端执行器能够在三维空间内精准到达任意位置和姿态。这种高度的灵活性与拟人化运动能力,使其在焊接、装配、喷涂、检测等复杂工艺中表现出色,是实现高柔性自动化生产的核心装备。
持之以恒
图纸ID: 315092070396204616
图纸格式:stp
图纸版本:其它模型软件
文件大小:709.30KB
所需积分:10机械币
可否编辑: 可进行编辑,不包含参数
关注人数:0人