移动式立柱码垛机械手(关节型坐标机器人)
发布时间:2026-01-28
-
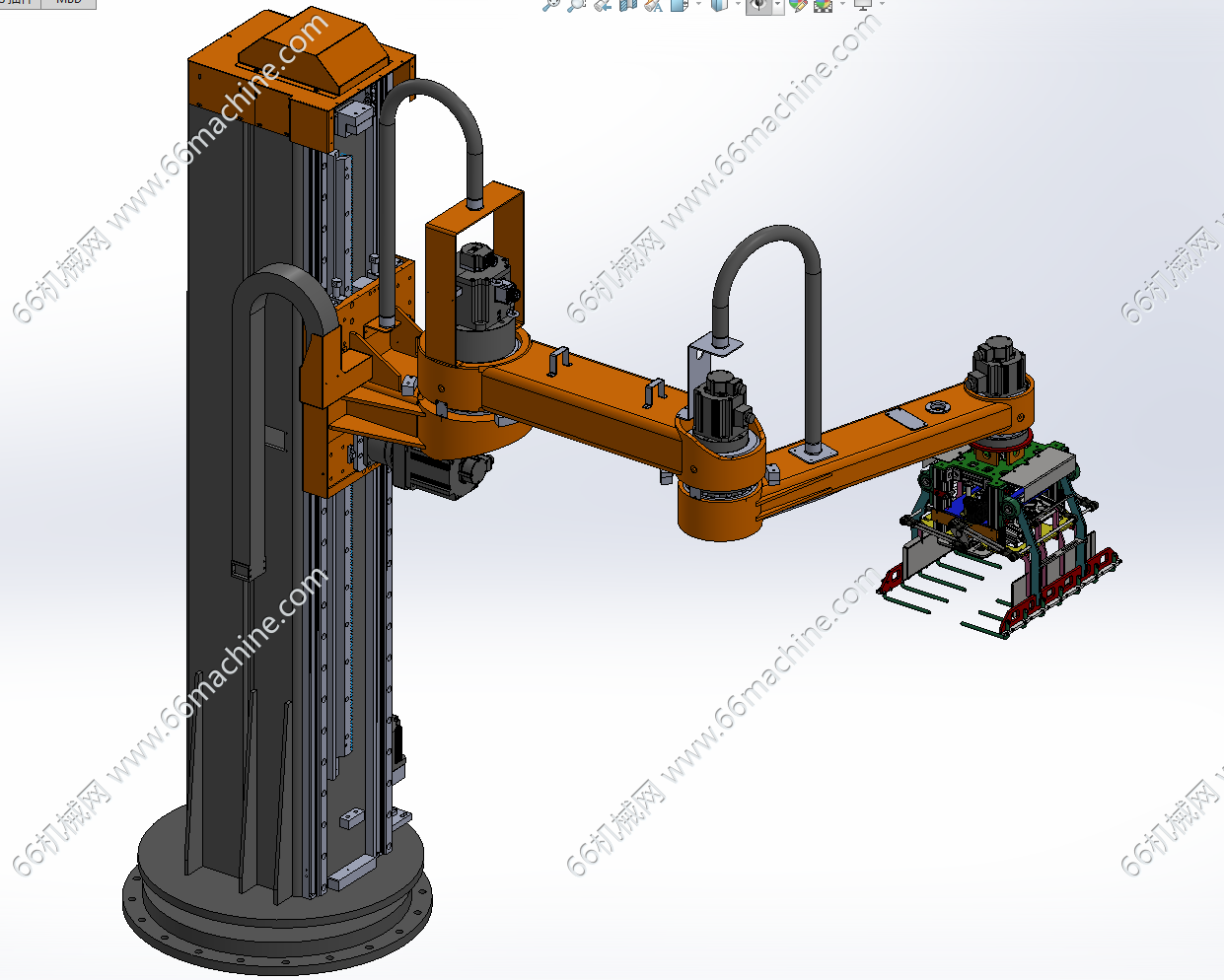
移动式立柱码垛机械手.png
-
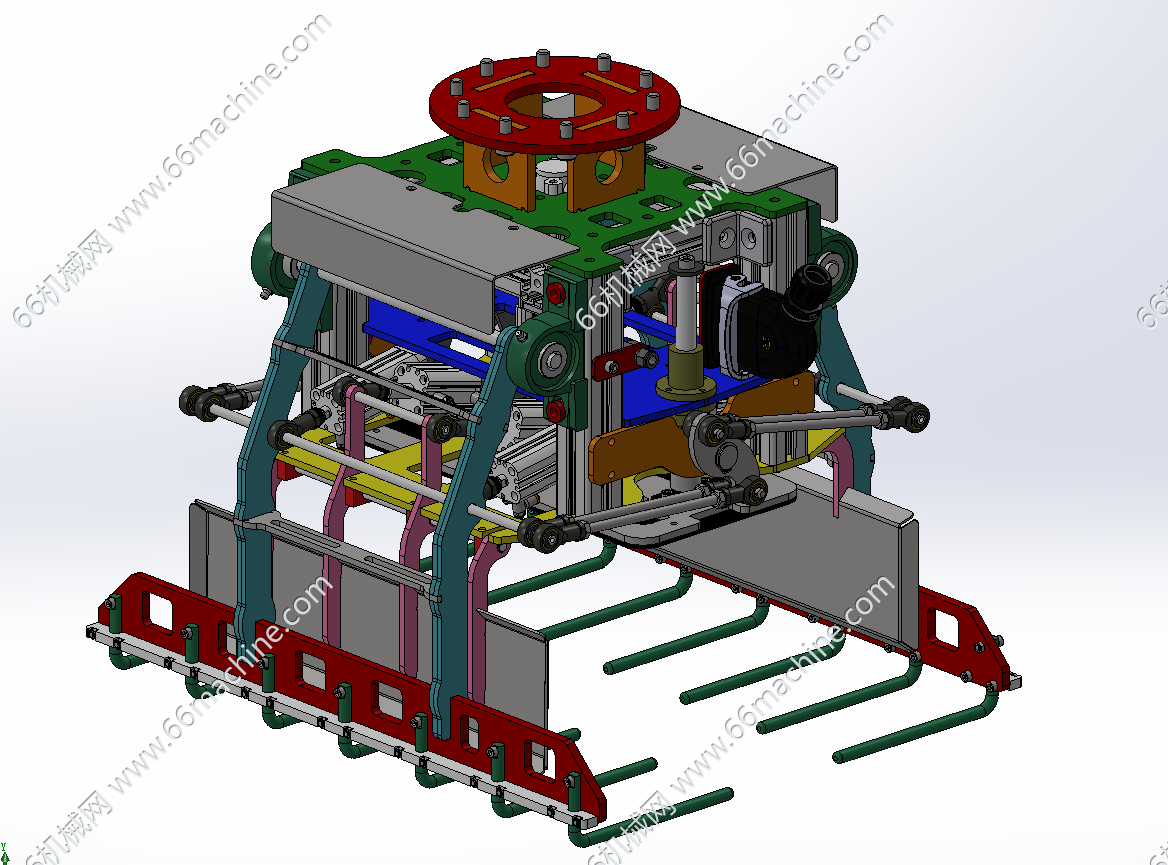
末端夹爪.png
-
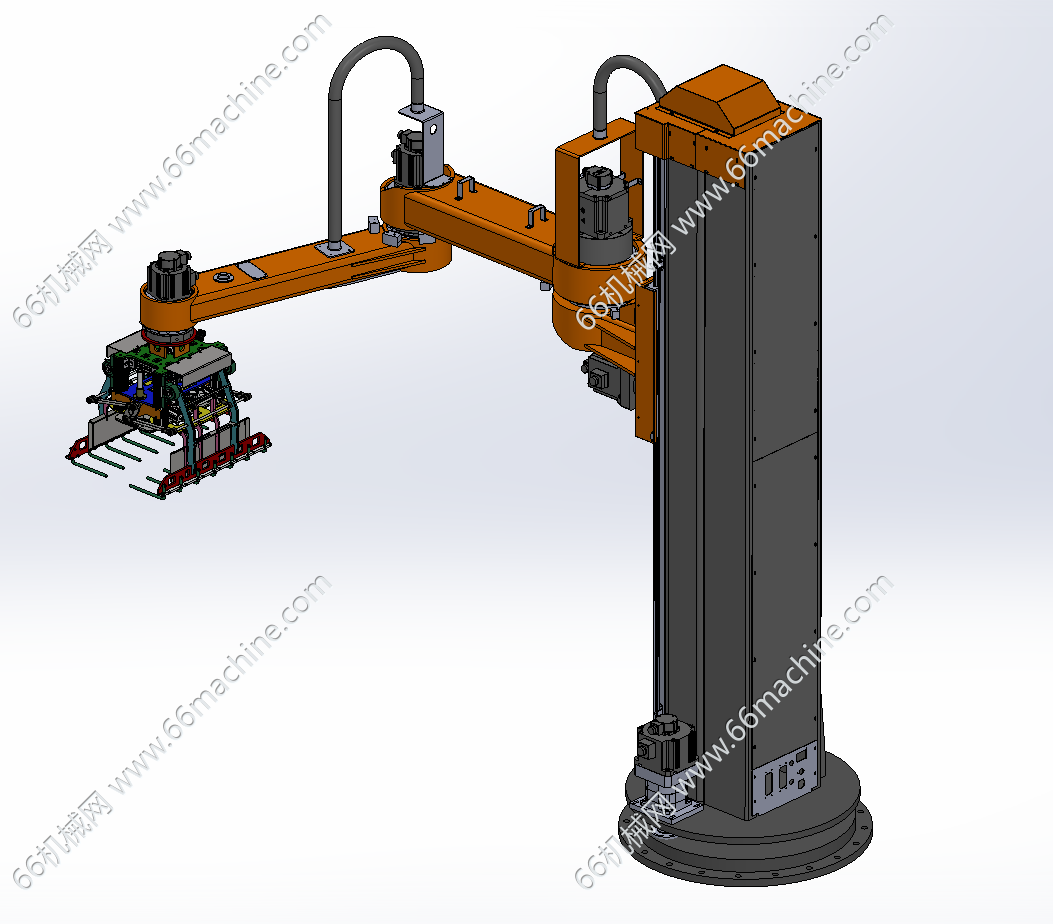
移动式立柱码垛机械手轴测图.png
-
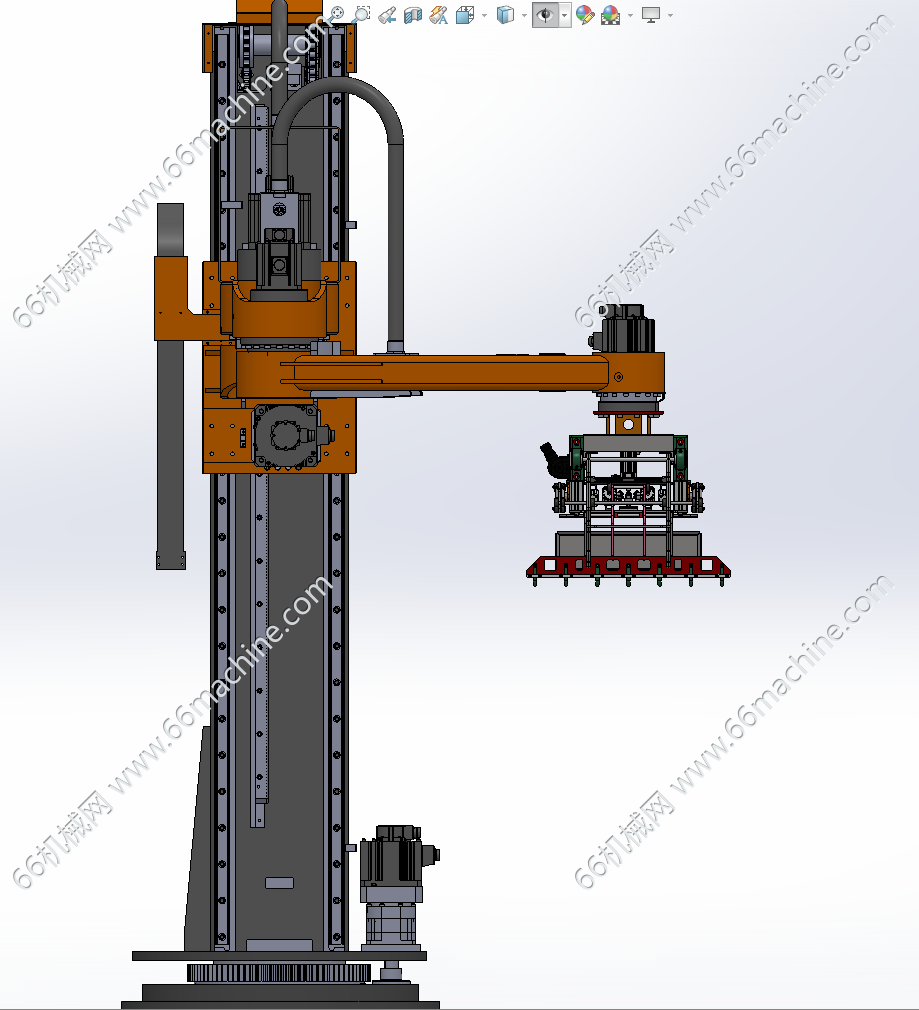
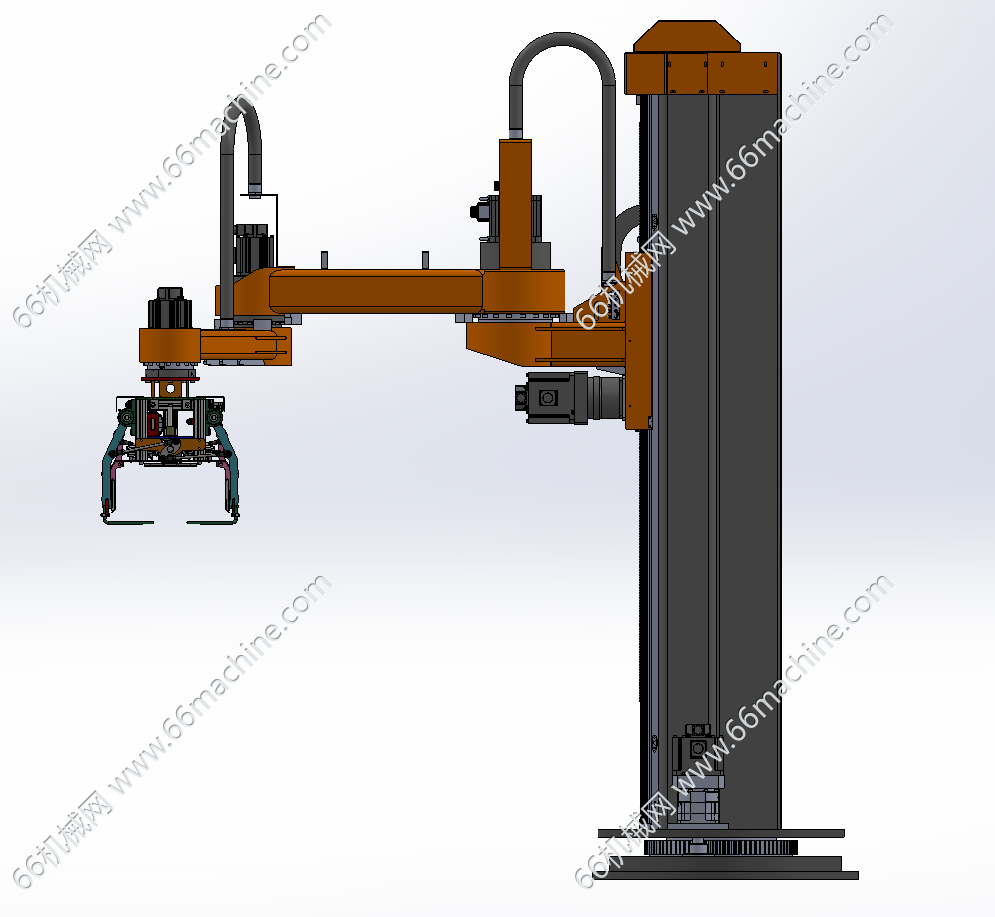
移动式立柱码垛机械手主视图.png
-
移动式立柱码垛机械手侧视图.png
-
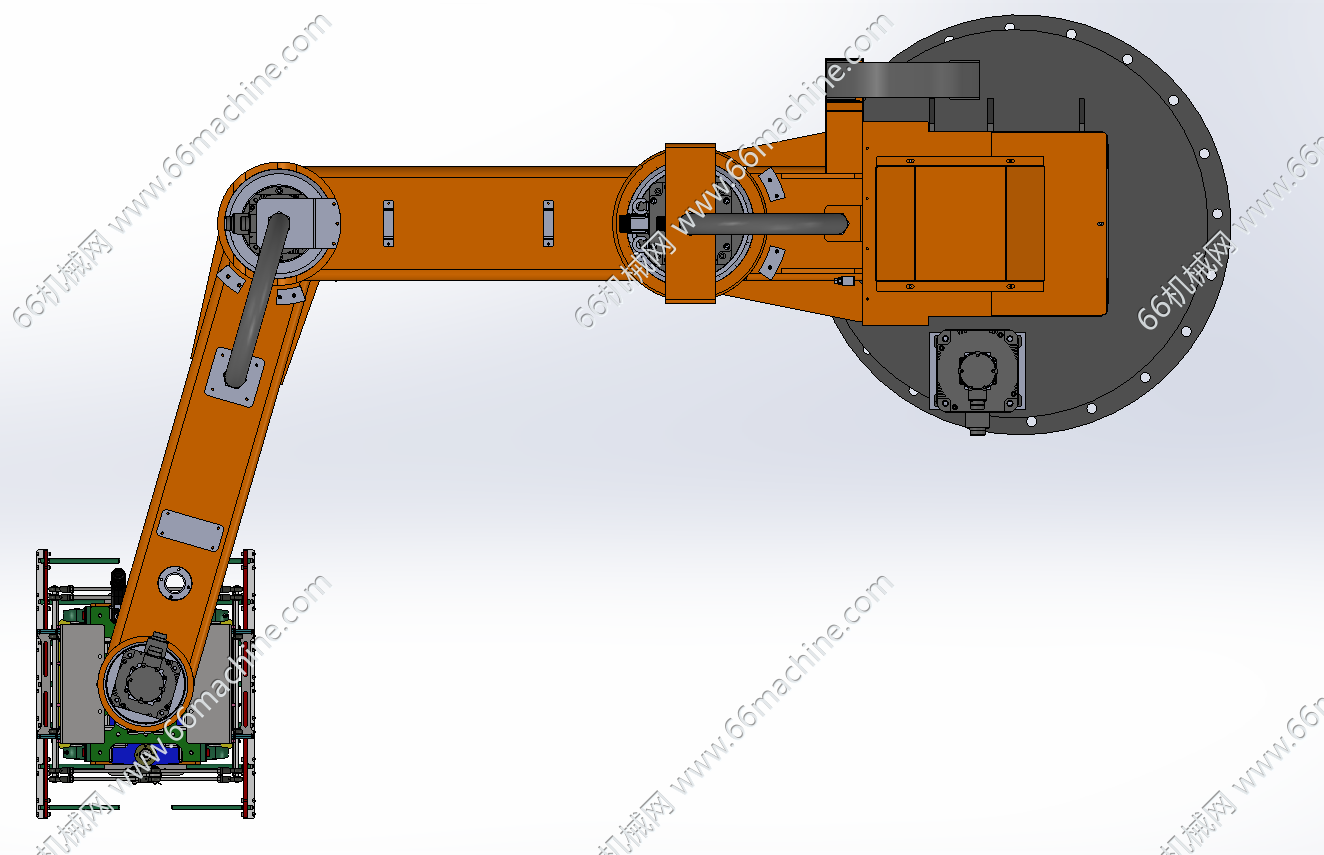
移动式立柱码垛机械手俯视图.png
图纸描述
本模型为移动式立柱码垛机械手(关节型坐标机器人),是一种主要用于完成码垛和拆垛作业的工业机器人。其核心特征是一个垂直安装的立柱作为主支撑和核心运动轴,机械臂在此立柱上作径向运动,从而实现将货物从输送线上抓取并精准摆放至托盘(或反之)的循环作业。
