六足机器人.png
机械腿单元.png
六足机器人主视图.png
六足机器人侧视图.png
六足机器人俯视图.png
源文件.png
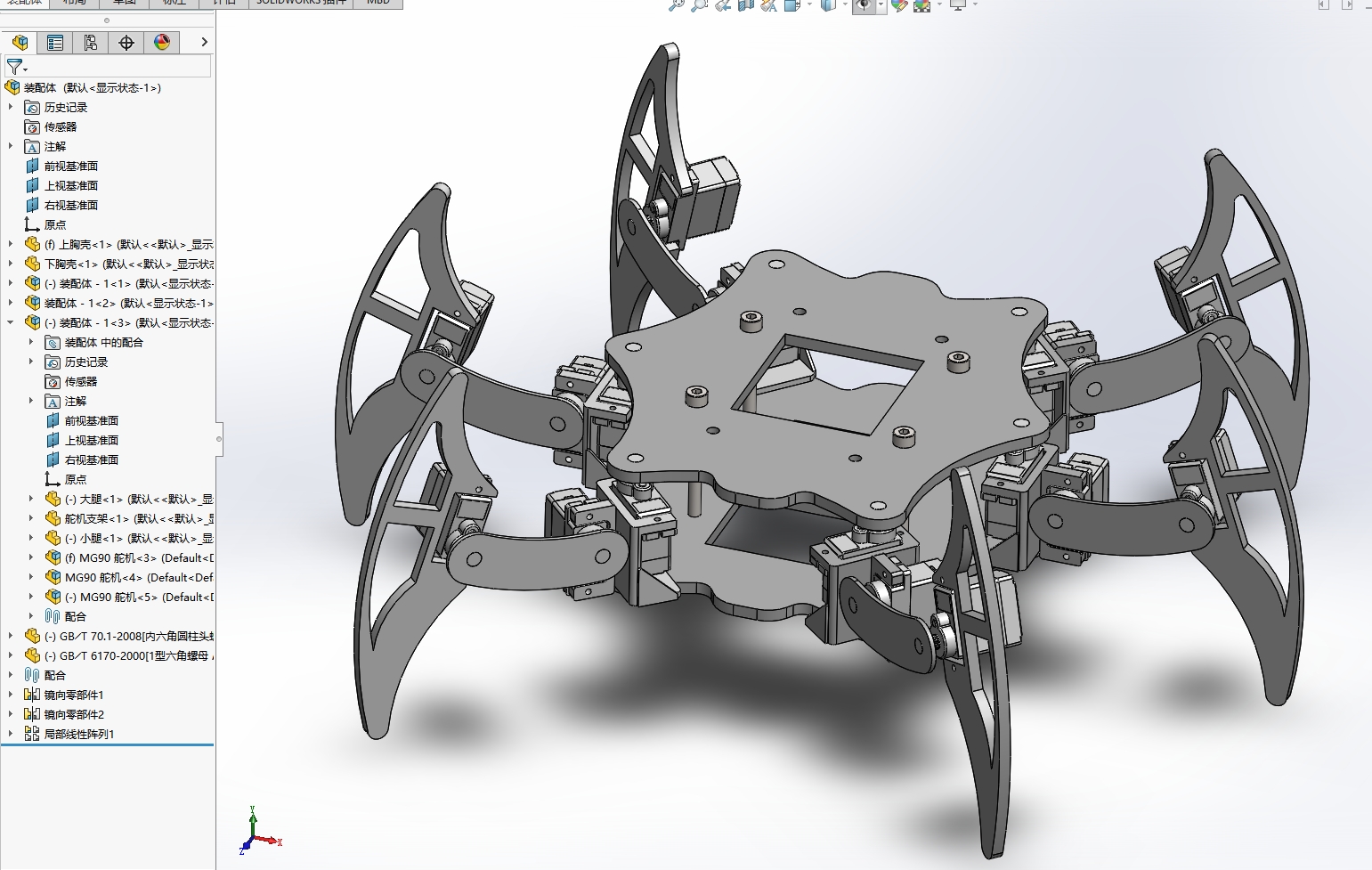
六足机器人由上胸壳、下胸壳、六个小腿、六个大腿、六个舵机支架、 18 个 舵机以及一套螺丝、螺母和铜柱组成。躯干舵机放置在上胸壳和下胸壳之间由舵 机支架固定,大腿舵机由舵机支架的另一侧固定并且与机器人大腿部分链接,小 腿舵机链接了小腿和大腿。上胸壳上部分则可以固定所需部件,例如电源、开发 板和各种模块等。
持之以恒
图纸ID: 259721482006043594
图纸格式:SLDASM、SLDPRT、sldprt
图纸版本:Solidworks2020
文件大小:8.24MB
所需积分:30机械币
可否编辑: 可进行编辑,包含特征参数
关注人数:0人