轮式双足机器人.png
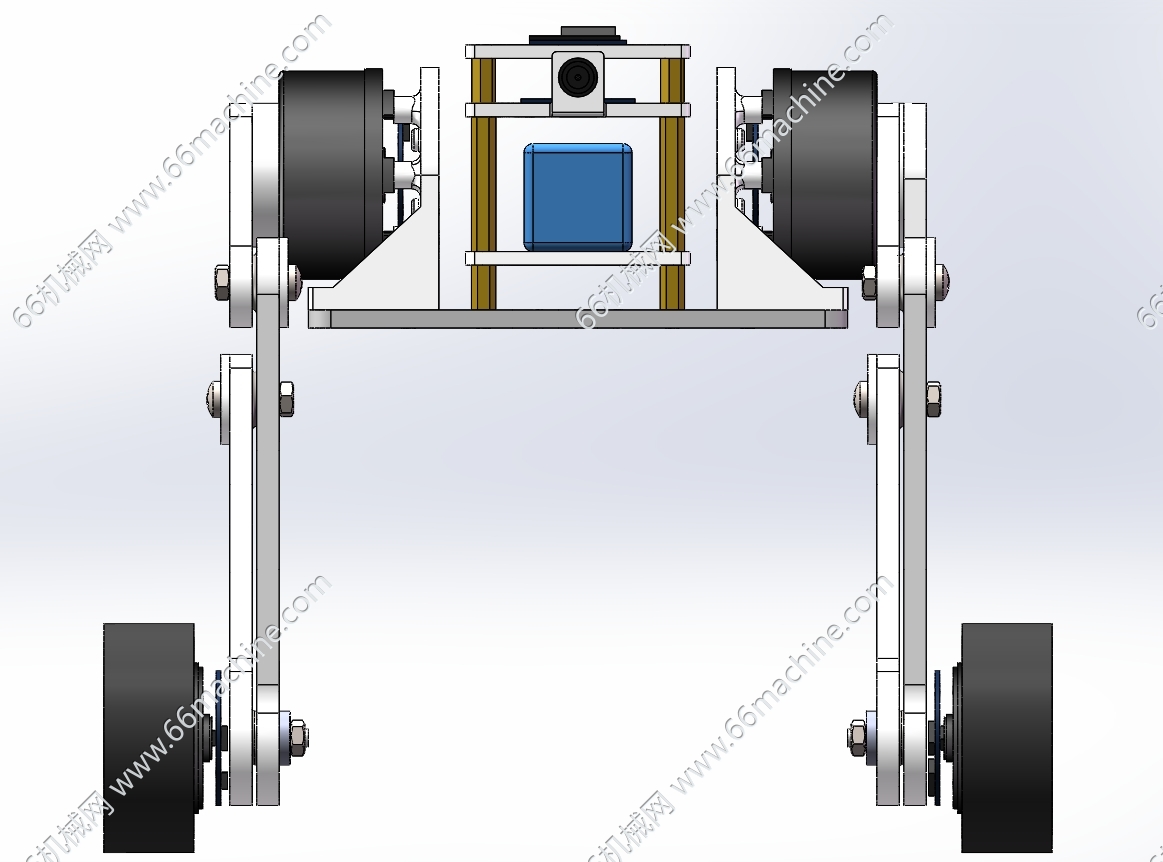
轮式双足机器人主视图.png
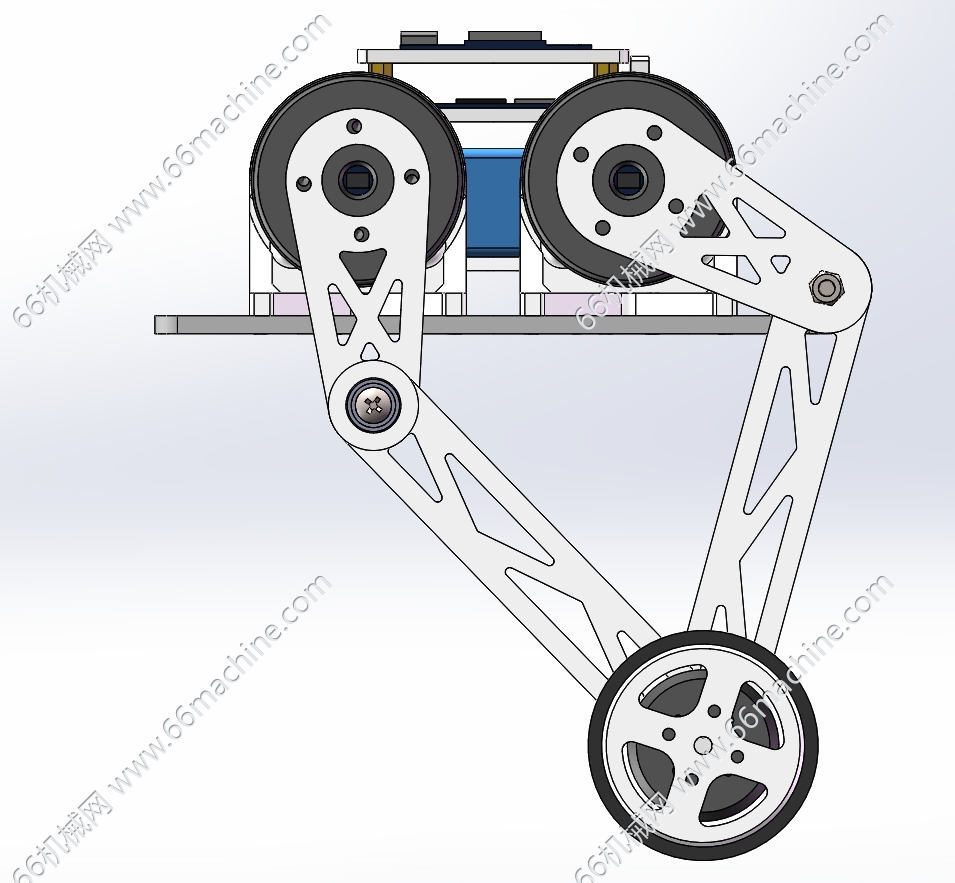
轮式双足机器人侧视图.png
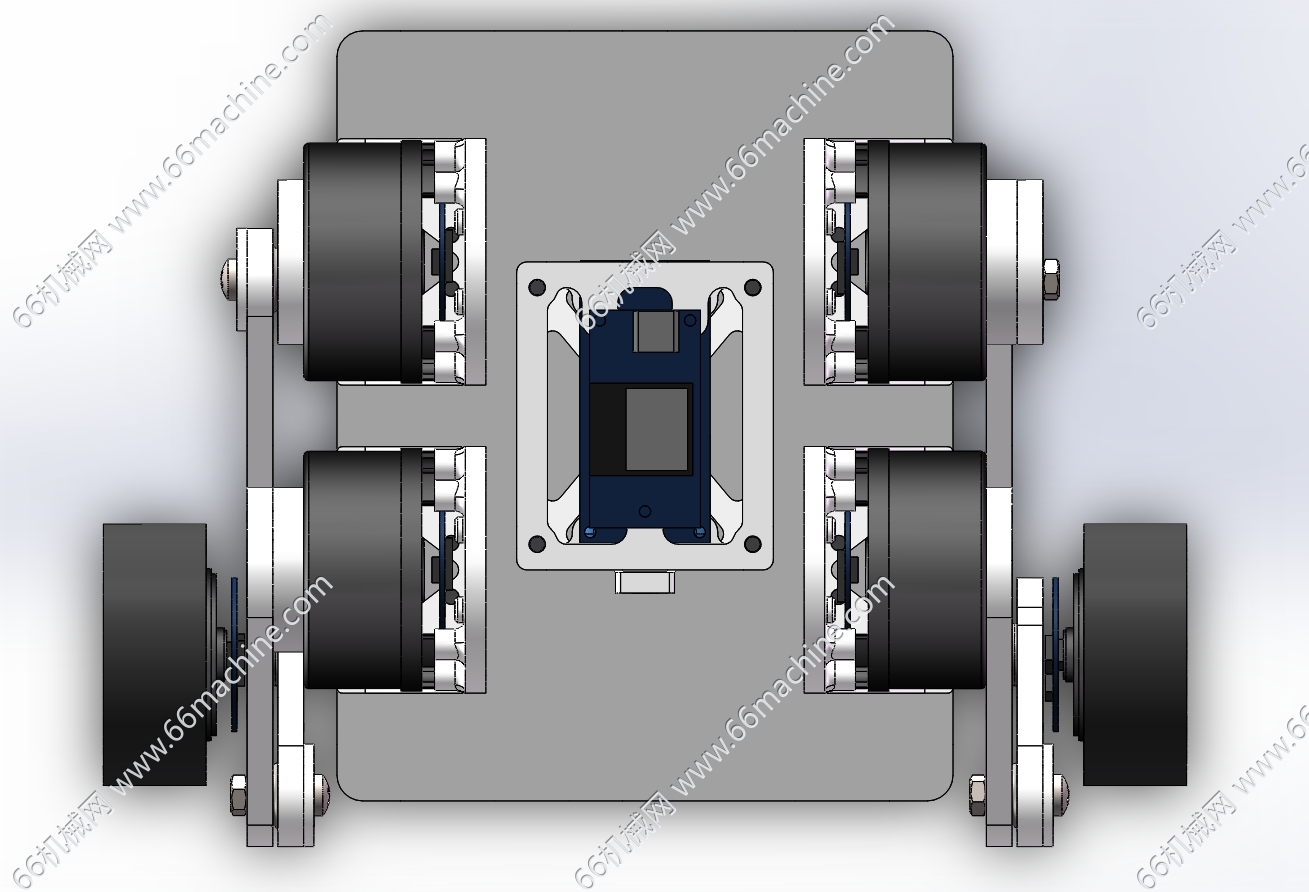
轮式双足机器人俯视图.png
源文件.png
本模型为轮式双足机器人,采用四组伺服电机驱动连杆(即大腿与小腿)进行行走,包括足关节力传感器、动态平衡控制方法、弹性驱动关节等。这些技术相互配合,使得双足机器人能够在各种复杂的环境中稳定地行走和执行任务。
持之以恒
图纸ID: 259721482006042845
图纸格式:SLDPRT、sldprt、SLDASM
图纸版本:Solidworks2019
文件大小:4.74MB
所需积分:40机械币
可否编辑: 可进行编辑,包含特征参数
关注人数:0人