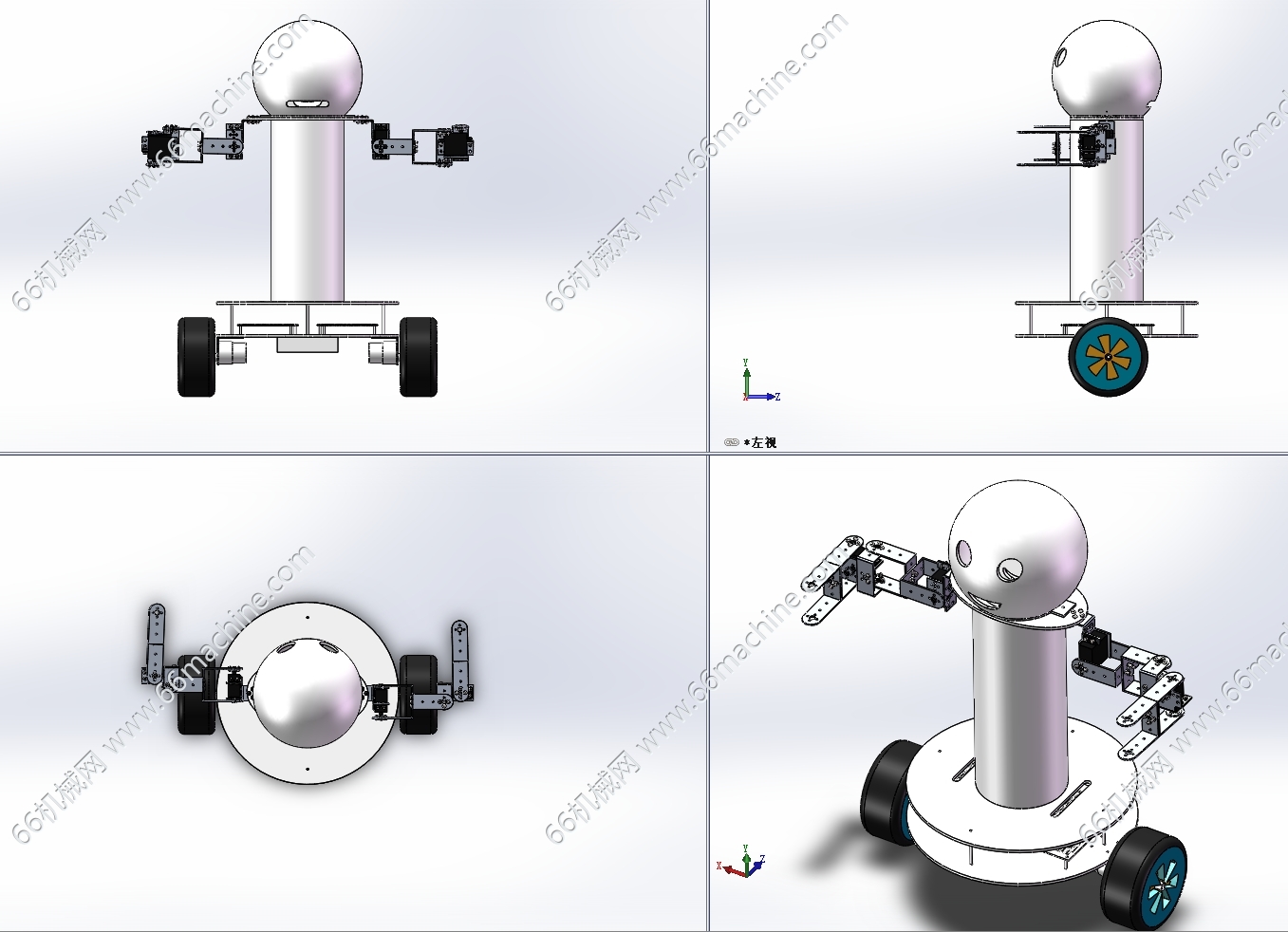
摘要: 机器人技术是一个集环境感知、轨迹规划、机械手应用等功能于一体的机电一体化系统。它是集中了计算机、机构学、传感技术、电子技术、人工智能及自动控制等多科而形成的高新技术。人类社会始终朝着自动化和智能化方向发展,机器人研发、制造和应用将成为衡量国家科技创新和高端制造业水平的重要标志,是国家科技发展的战略需求。智能机器人的下一步发展将体现在作业能力、人机交互、安全性等诸多方面的提升和改进上。所以,随着社会的发展,智能化已经成为各类产品的主要发展方向,人们也在不断的用科技来改变生活,基于此,我们考虑将平衡车与机械臂相结合,制作一款自平衡服务机器人。本文介绍了基于STM32F103单片机的自平衡小车系统的设计。系统基于陀螺仪,利用PID平衡算法,对小车的速度倾斜角度平衡状态来进行检测,并通过单片机来控制电机来实现小车平衡地运动。系统中采用舵机控制板控制舵机,使机械臂完成一定的动作。本次设计将手机与机器人联系起来,通过手机可以向平衡小车发送命令,平衡小车也可以将自身的数据发送到手机上,从而可以通过手机实时地控制小车,也能在手机上观察到小车的状态。此款机器人主要针对办公室生活和家庭生活中,他可以为在我们疲惫的时候为我们跳一支舞蹈,通过手机蓝牙控制机器人的活动,方便快捷。希望我们的这个机器人可以为我们的生活提供方便,使得我们的生活更为简单。 关键词:自平衡;机器人;机械臂;平衡车;手机控制
图纸ID: 259721482006041907
图纸格式:SLDPRT、SLDASM、dwg、SCHDOC、c、h、C、H、crf、d、o、iex、axf、htm、hex、lnp、map、sct、passoni、uvopt、dep、bak、lst、txt、Administrator、renchengwei、uvoptx、saved_uv4、uvprojx、s、doc
图纸版本:Solidworks2021
文件大小:25.78MB
所需积分:100机械币
可否编辑: 可进行编辑,包含特征参数
关注人数:0人