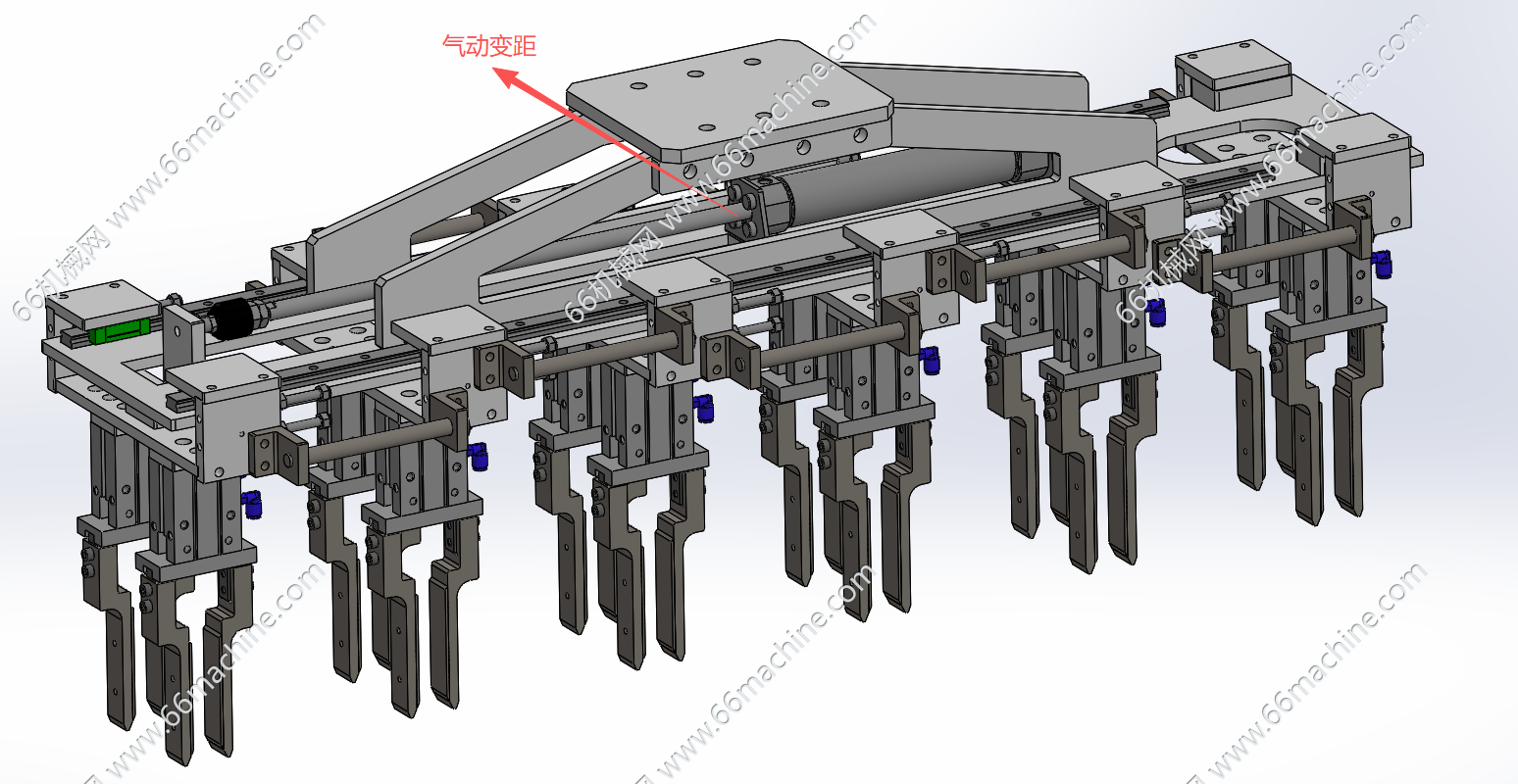
基于限位杆的变距多工位夹爪.png
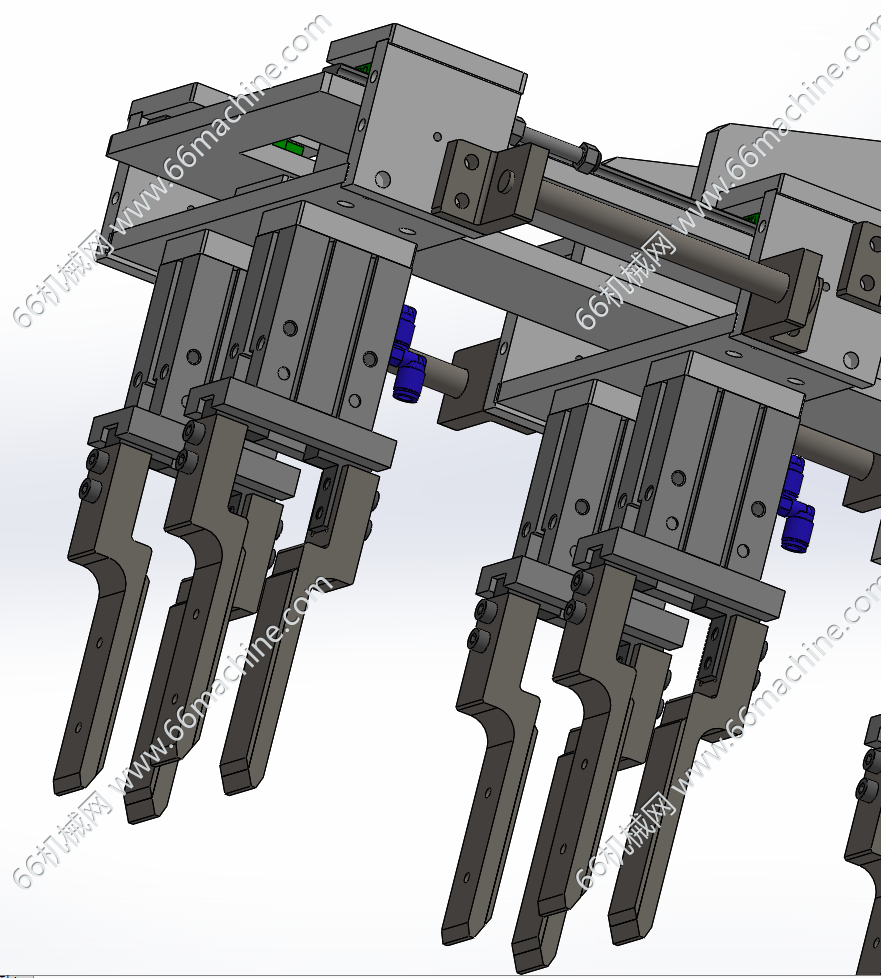
夹爪细节.png
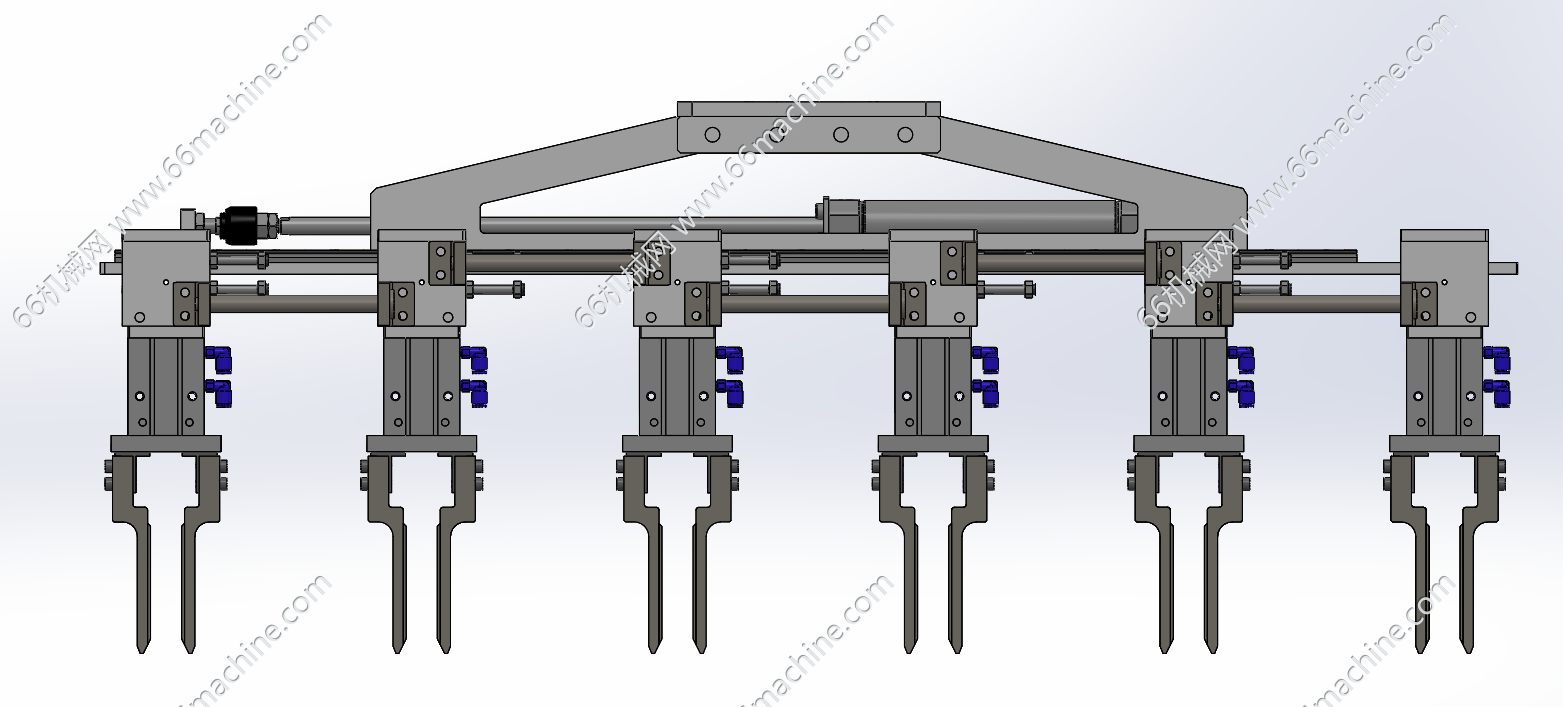
基于限位杆的变距多工位夹爪主视图.png
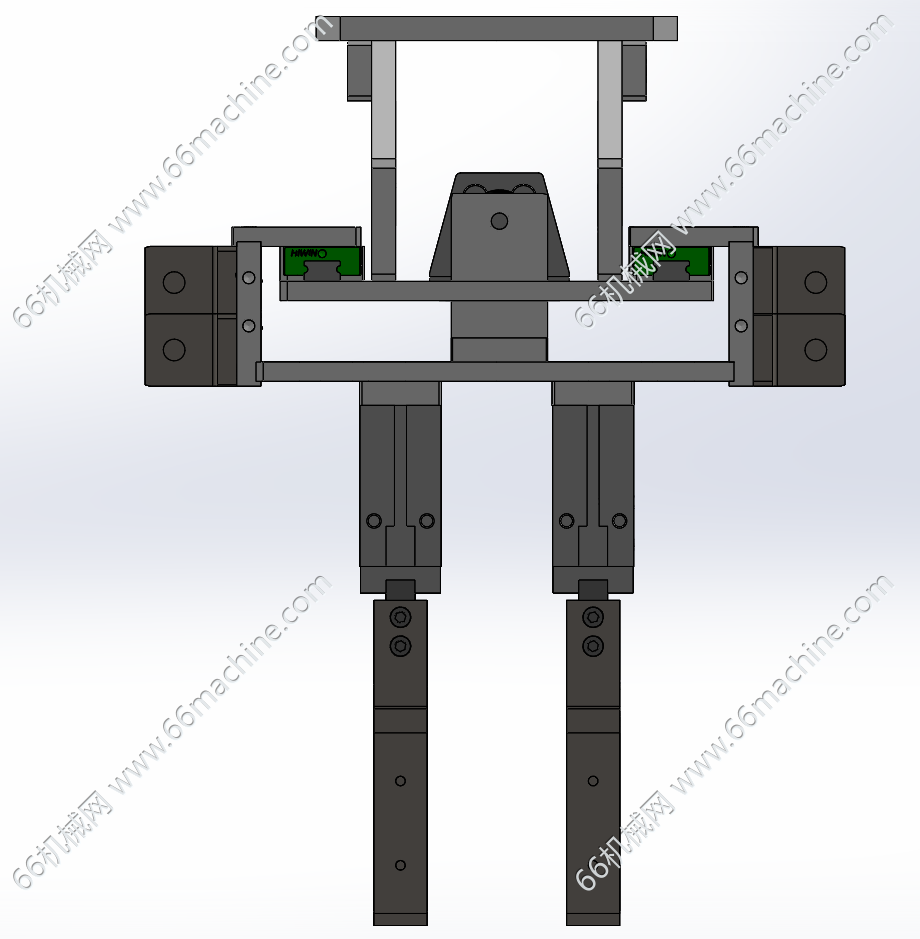
基于限位杆的变距多工位夹爪侧视图.png
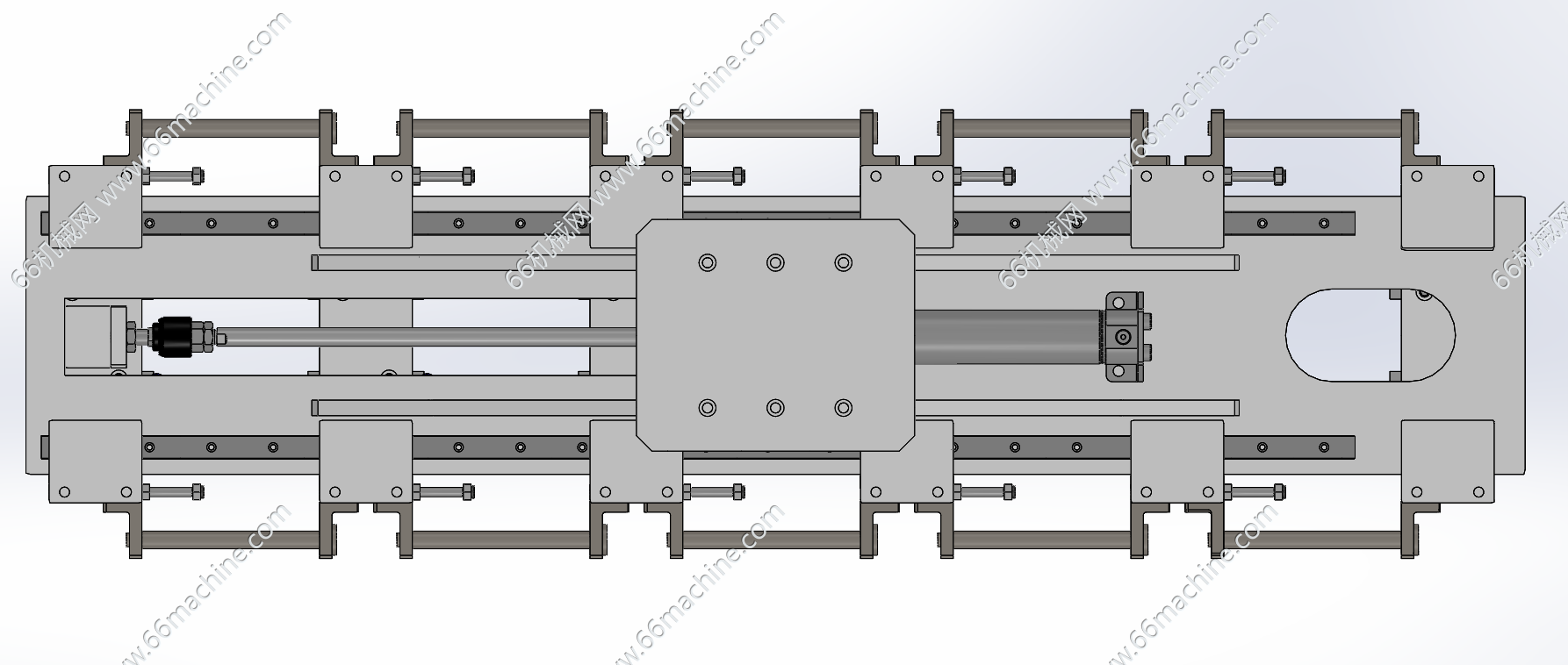
基于限位杆的变距多工位夹爪俯视图.png
本机构核心在于利用可调的限位杆或滑槽,对连杆或滑块的运动轨迹进行机械限位,从而改变夹爪或指段的张开距离(变距),实现多规格物体的兼容抓取,欢迎参考!
持之以恒
图纸ID: 315092070404591999
图纸格式:sldprt、sldasm、SLDASM
图纸版本:Solidworks2021
文件大小:1.59MB
所需积分:15机械币
可否编辑: 可进行编辑,不包含参数
关注人数:0人