基于连杆原理的可升降夹取机构(夹爪)
发布时间:2025-12-23
-
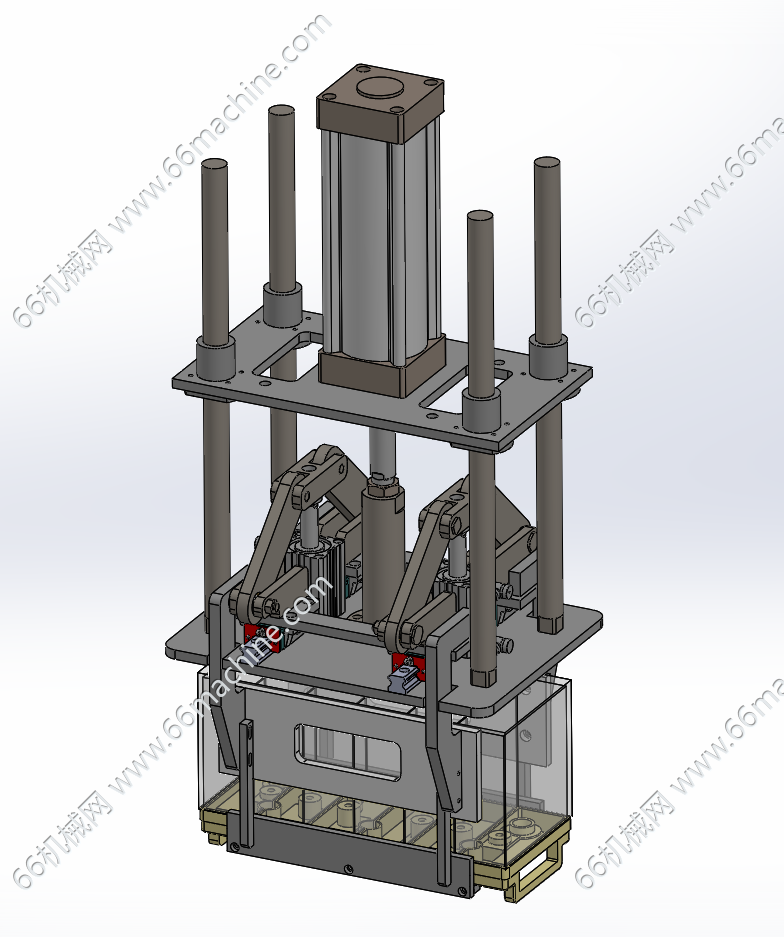
基于连杆原理的可升降夹取机构.png
-
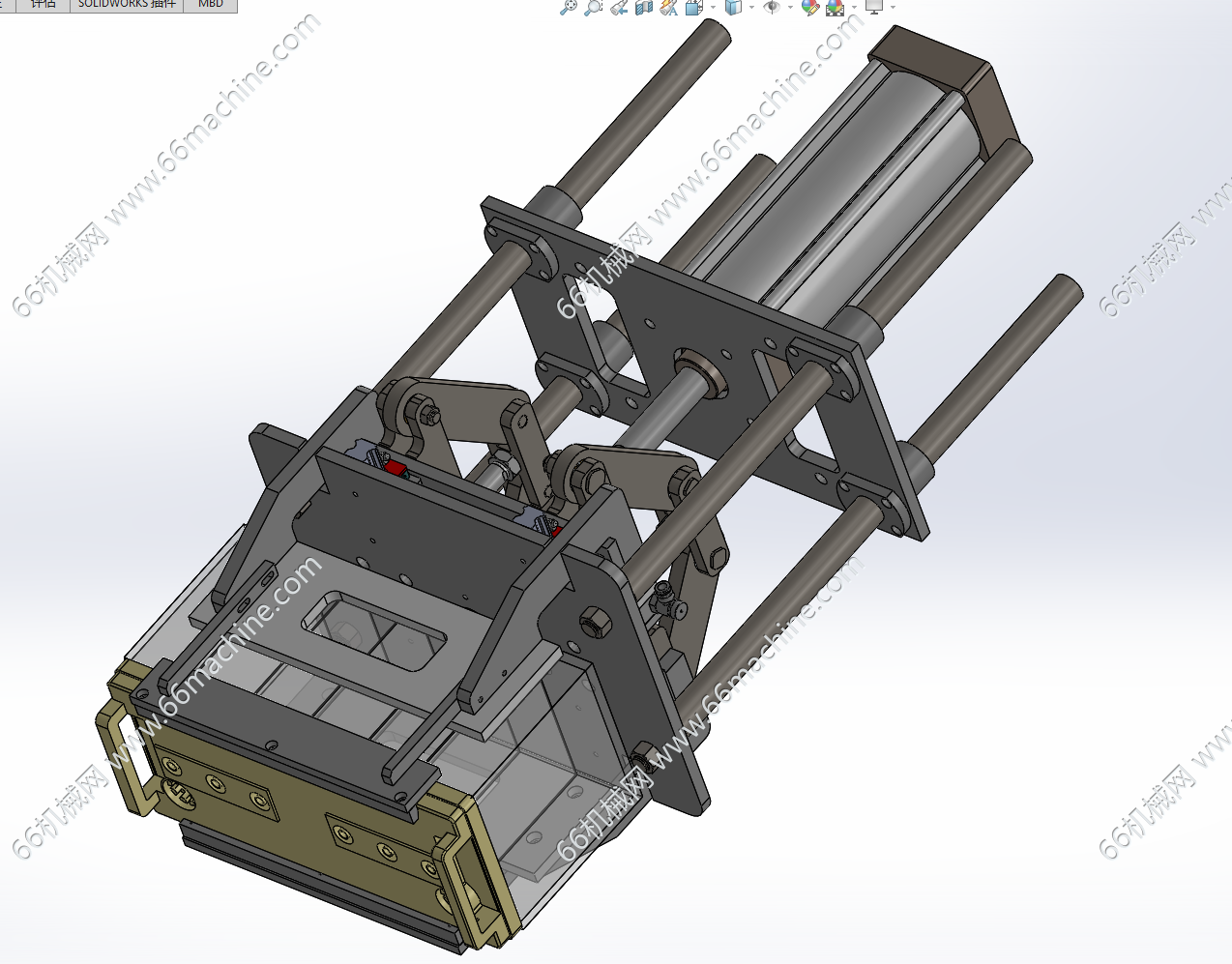
基于连杆原理的可升降夹取机构轴测图.png
-
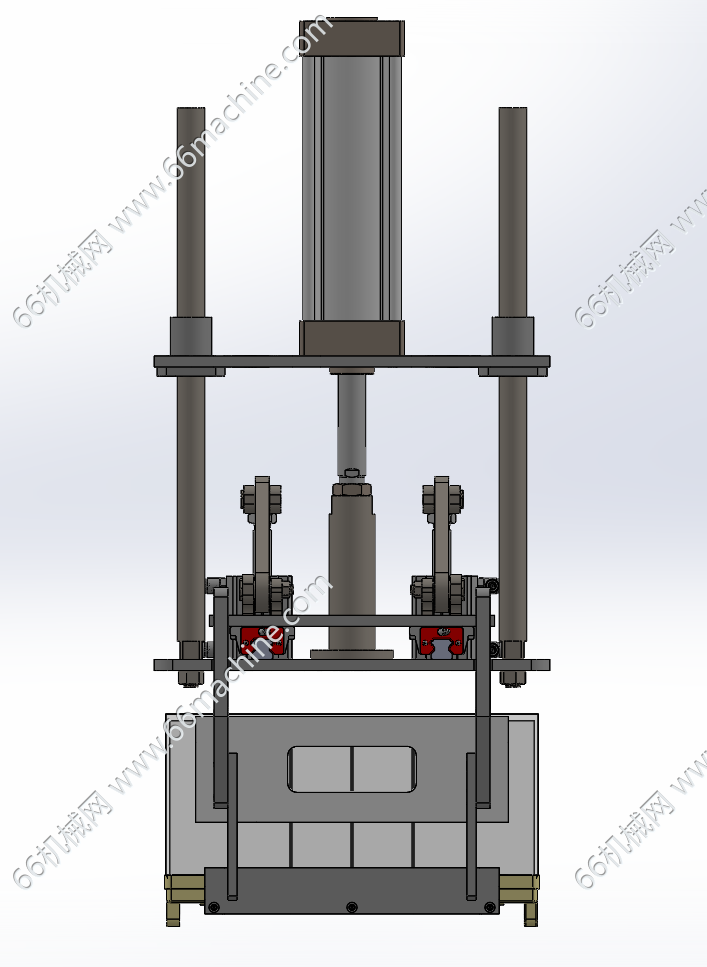
基于连杆原理的可升降夹取机构主视图.png
-
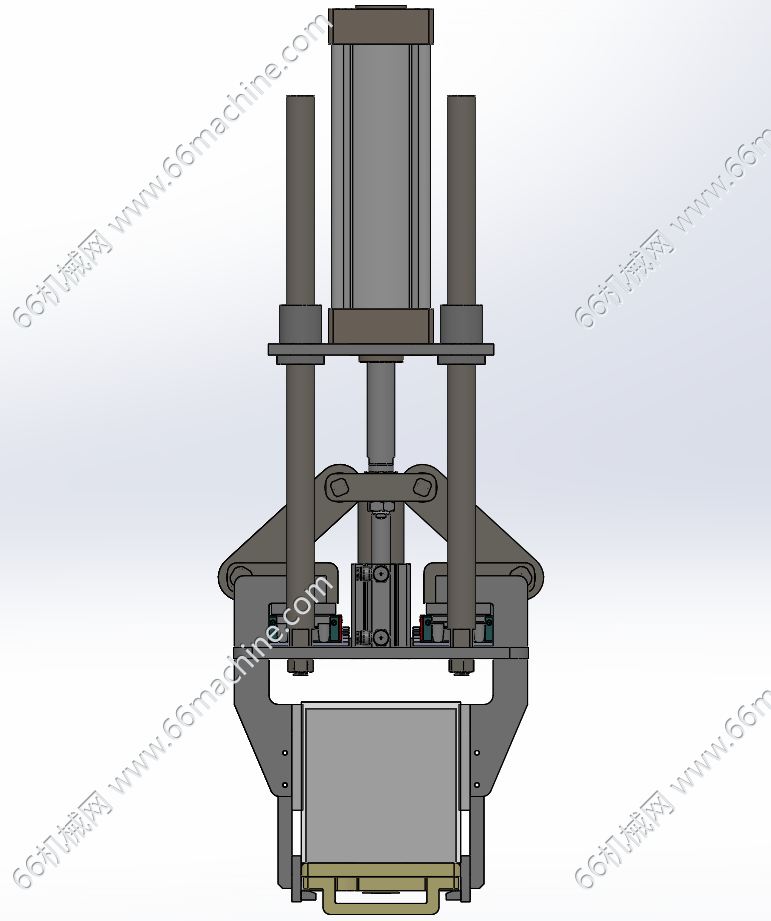
基于连杆原理的可升降夹取机构侧视图.png
-
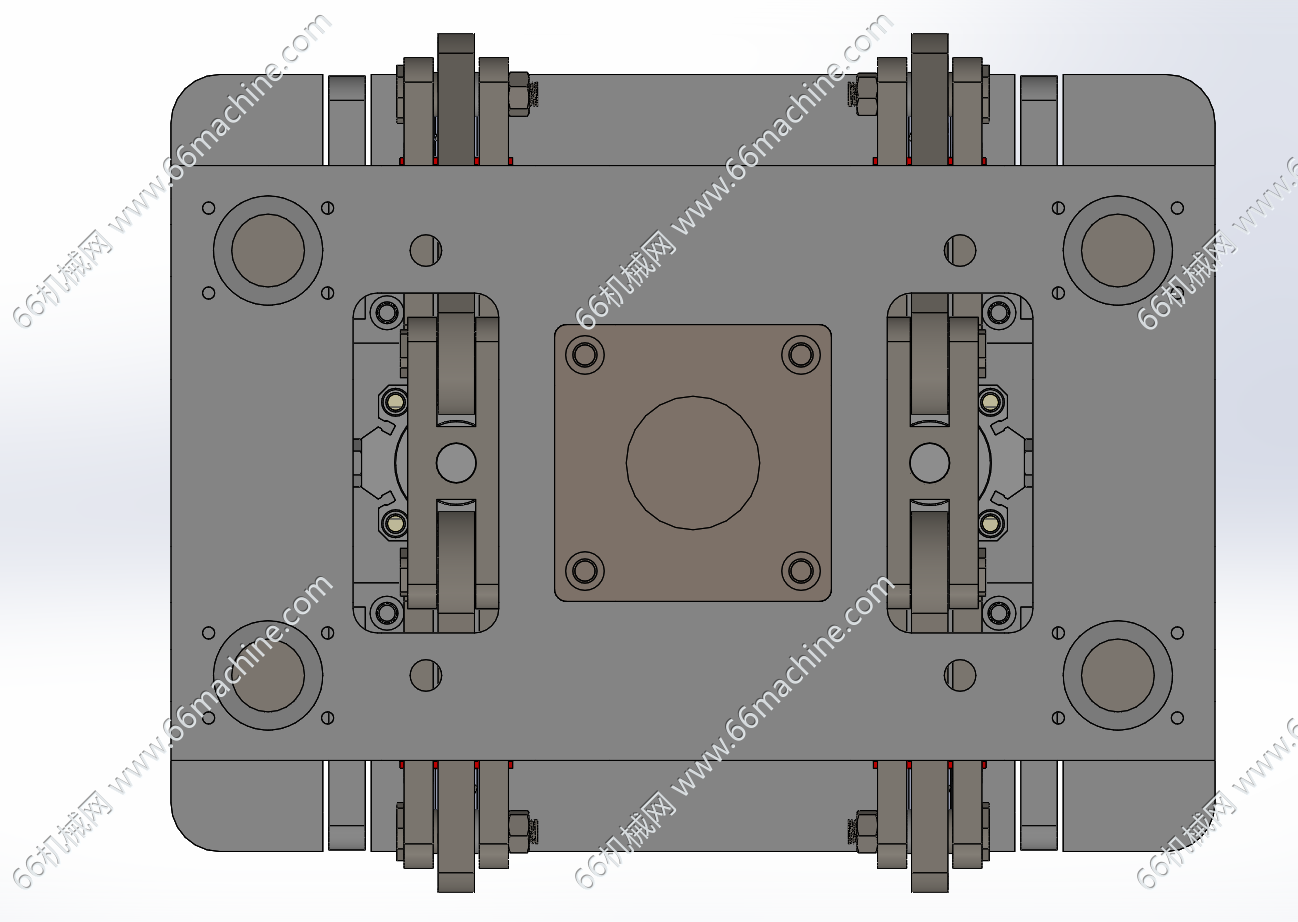
基于连杆原理的可升降夹取机构俯视图.png
图纸描述
本模型为基于连杆原理的可升降夹取机构(夹爪),利用连杆机构实现夹爪末端的直线平动,从而完成平行夹持动作。通过连杆结构保持夹爪姿态不变,避免圆弧轨迹带来的碰撞风险,兼具结构简单、控制容易、成本低等优势,广泛应用于工业抓取、精密搬运等场景。
