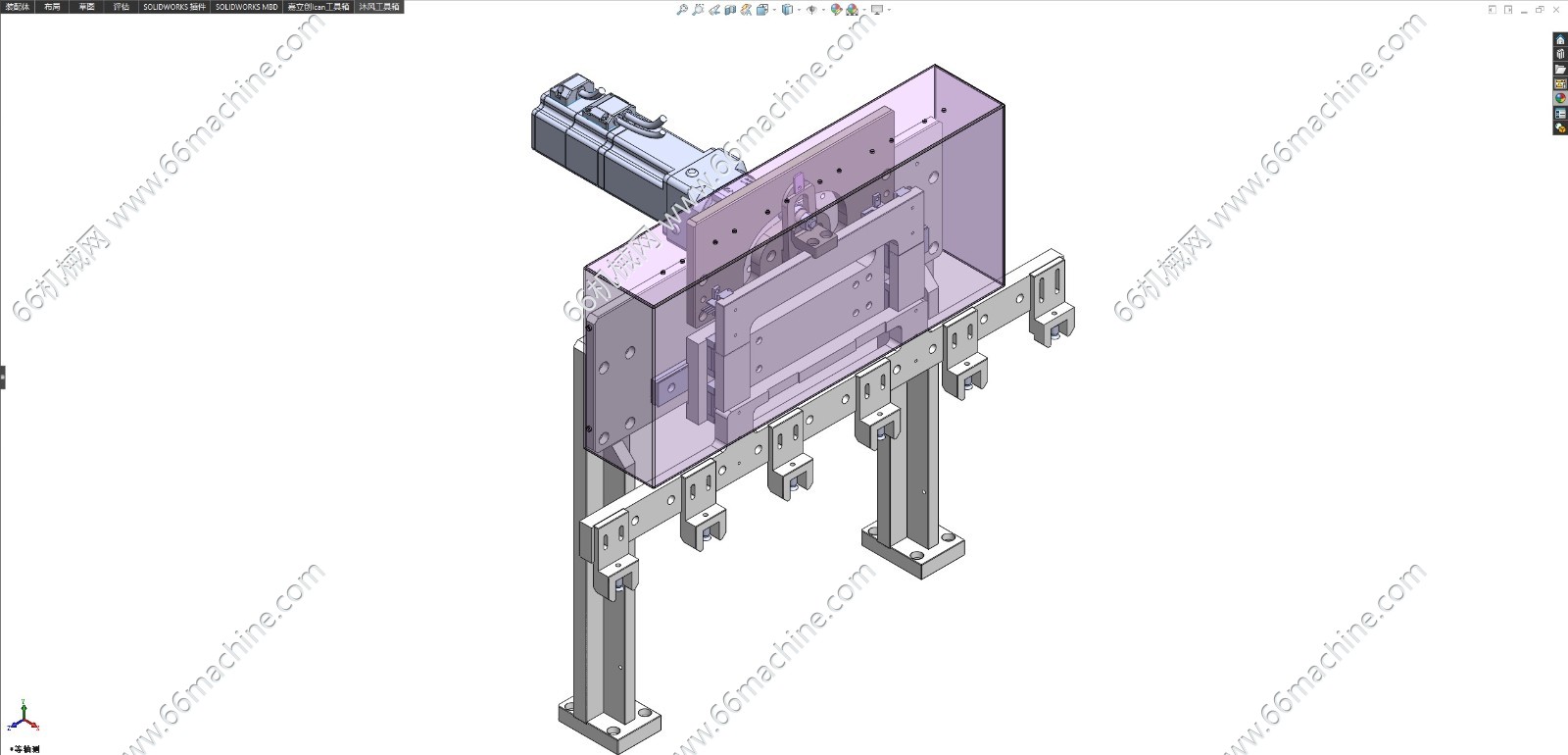
轴测图.jpg
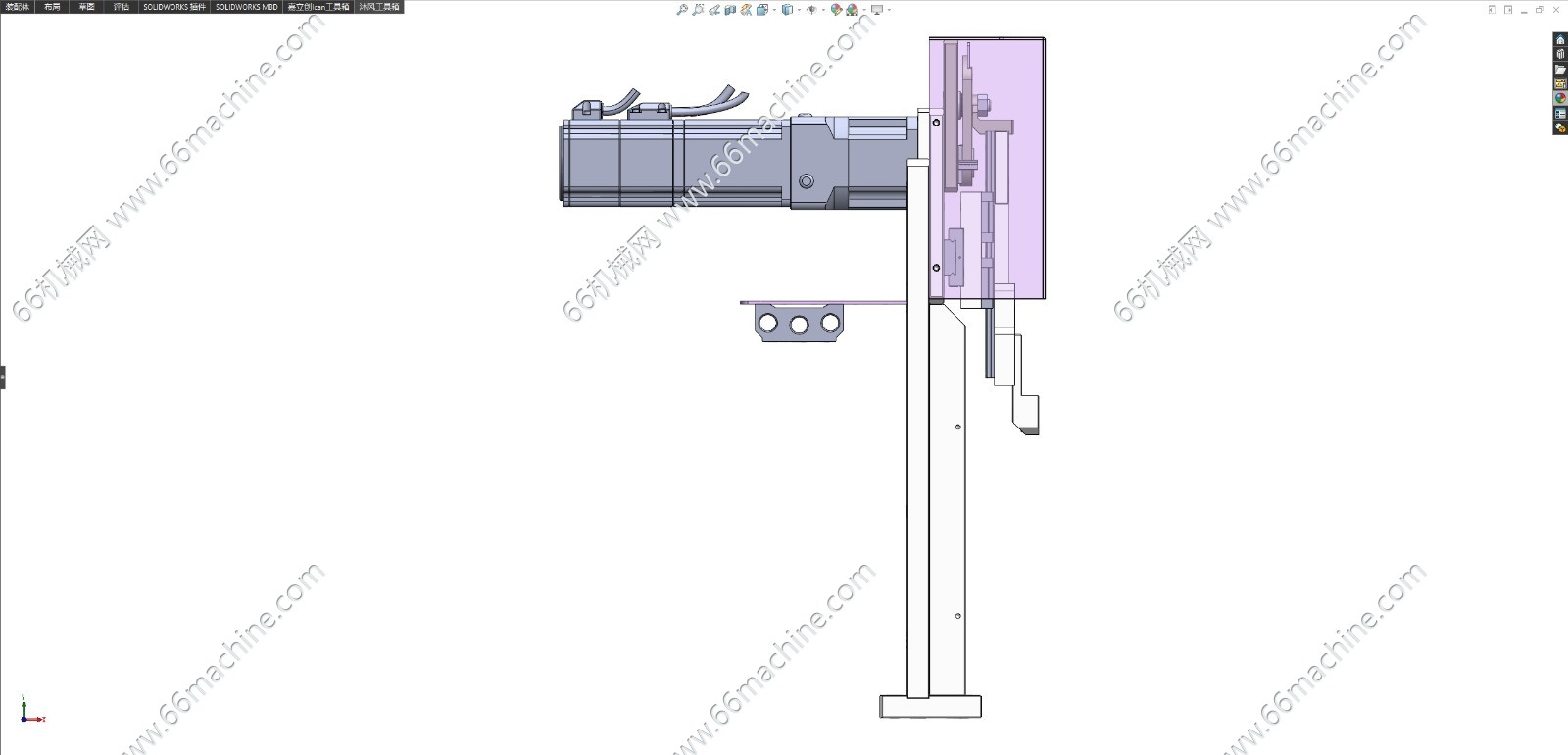
侧视图.jpg
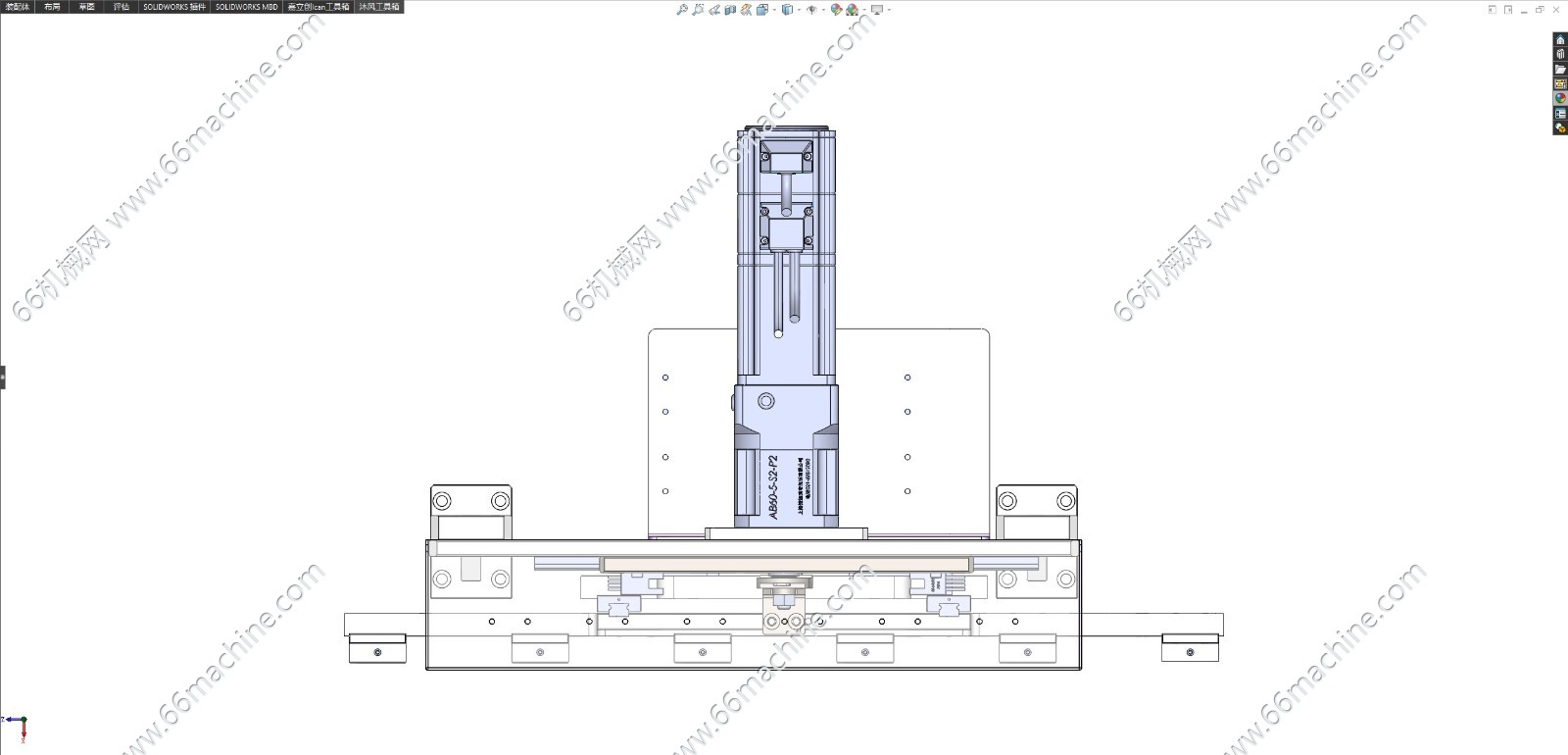
俯视图.jpg
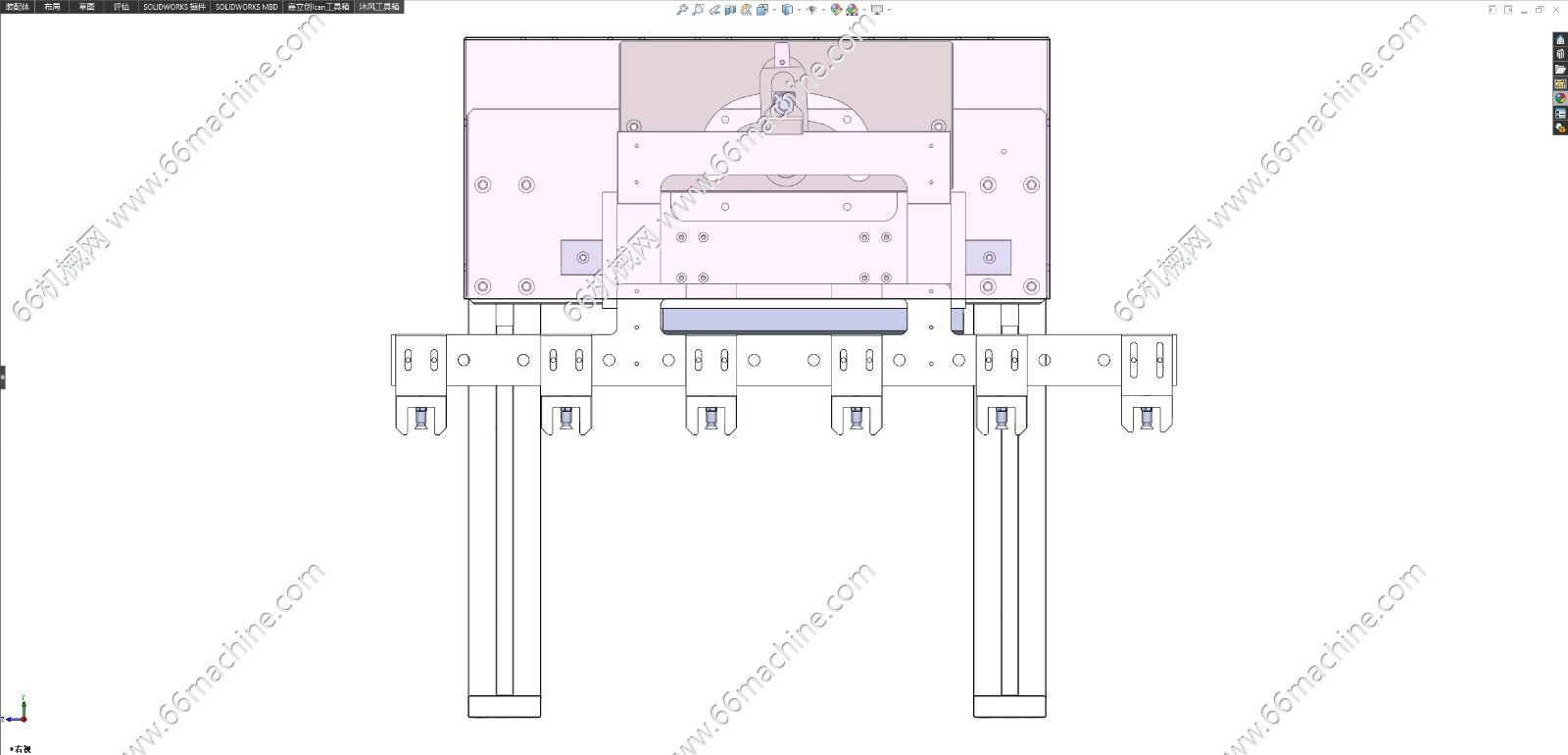
正视图.jpg
局部图.jpg
PPU机械手(Pick and Place Unit,取放单元机械手)是一种高速、高精度的凸轮驱动式平面取放机械手,其核心工作原理是通过共轭凸轮机构驱动摆臂在水平与垂直方向实现复合运动,使末端执行器(真空吸盘或夹爪)沿固定的"门"形或"倒U"形轨迹快速完成工件的拾取、平移与放置动作,无需复杂的伺服多轴联动即可实现高速循环取放。
非标设计•图纸驿站
图纸ID: 315092070396206370
图纸格式:sldprt、sldasm、SLDASM、STEP、smg、x_t
图纸版本:Solidworks2018
文件大小:7.81MB
所需积分:30机械币
可否编辑: 可进行编辑,不包含参数
关注人数:0人