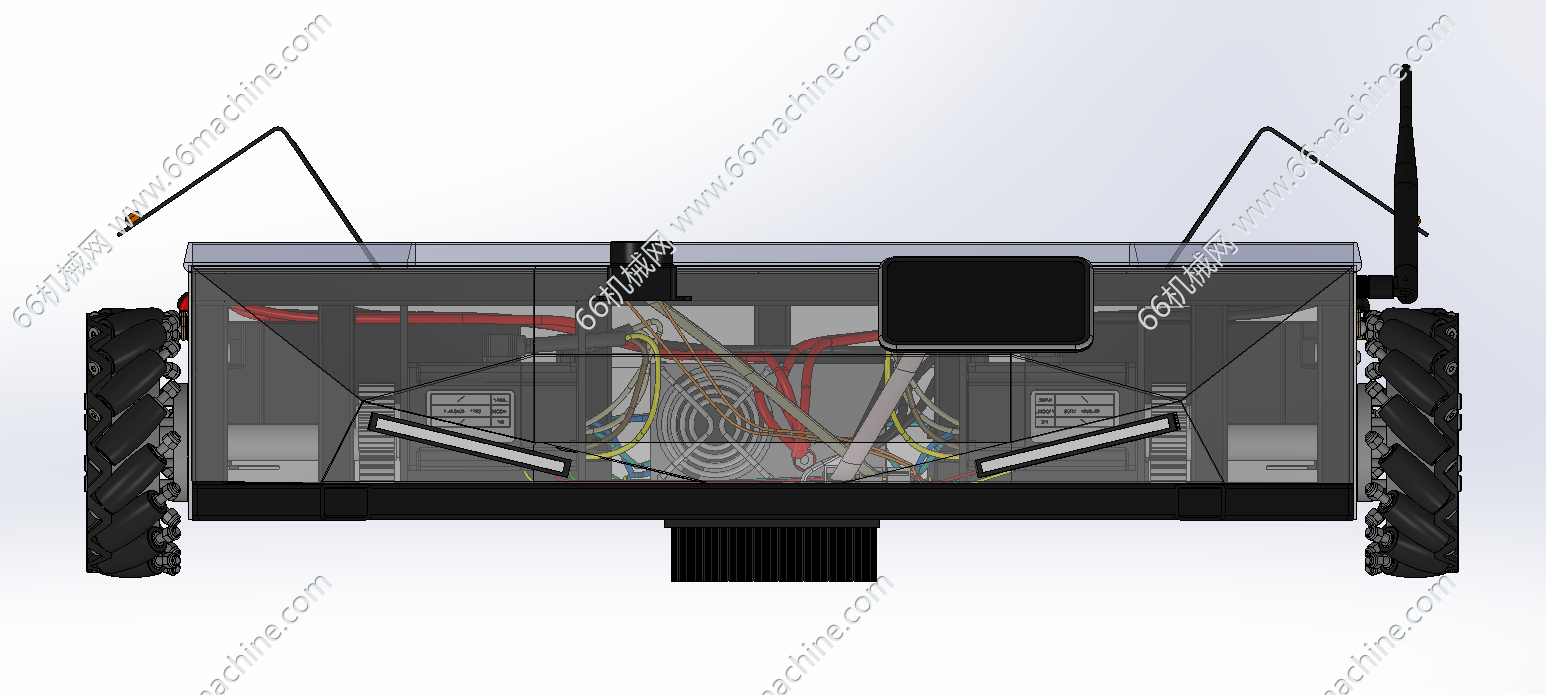
基于麦克纳姆轮的全向自动导引车(AGV)
发布时间:2025-11-10
-
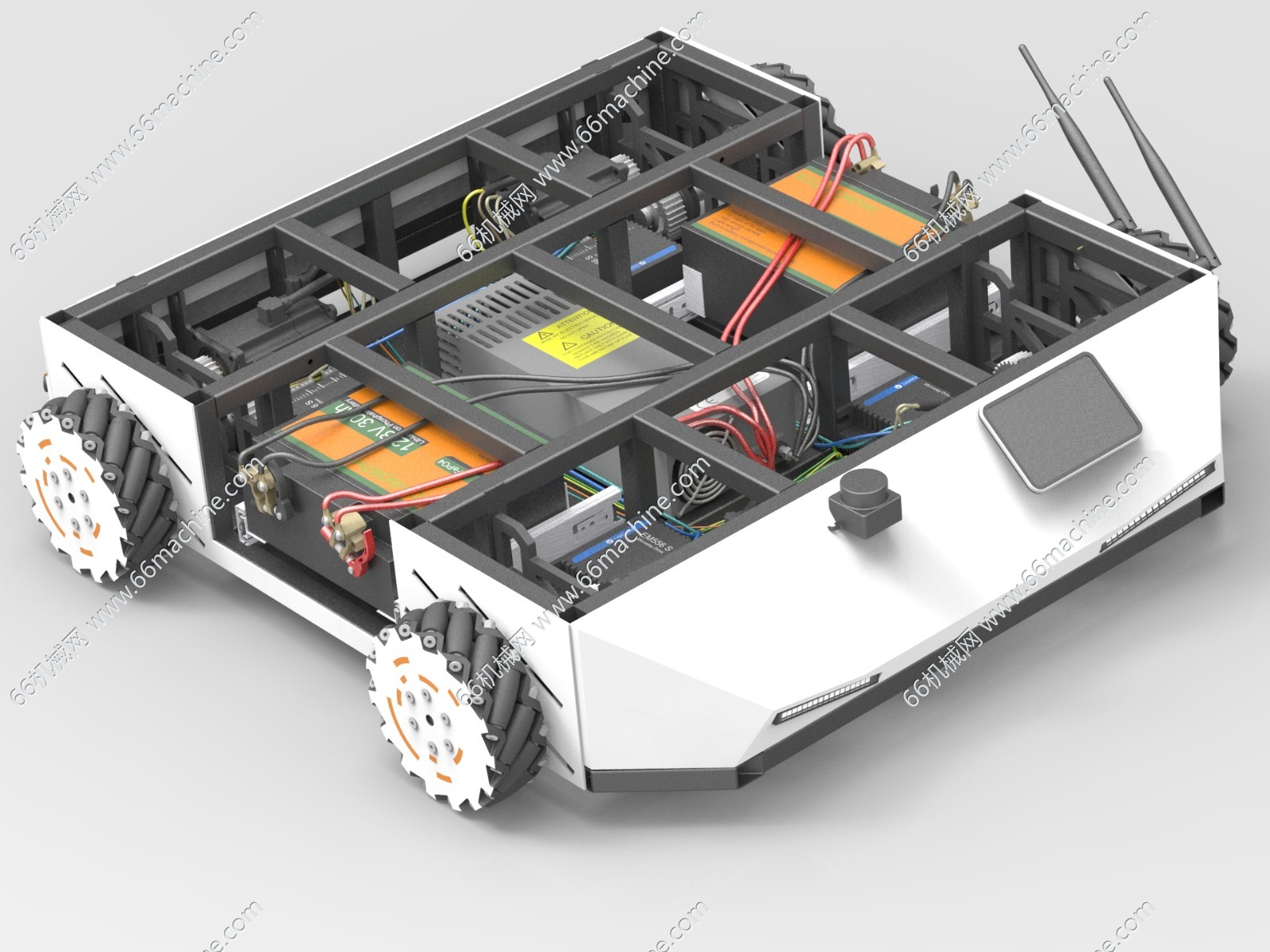
全向自动导引车渲染图.jpg
-
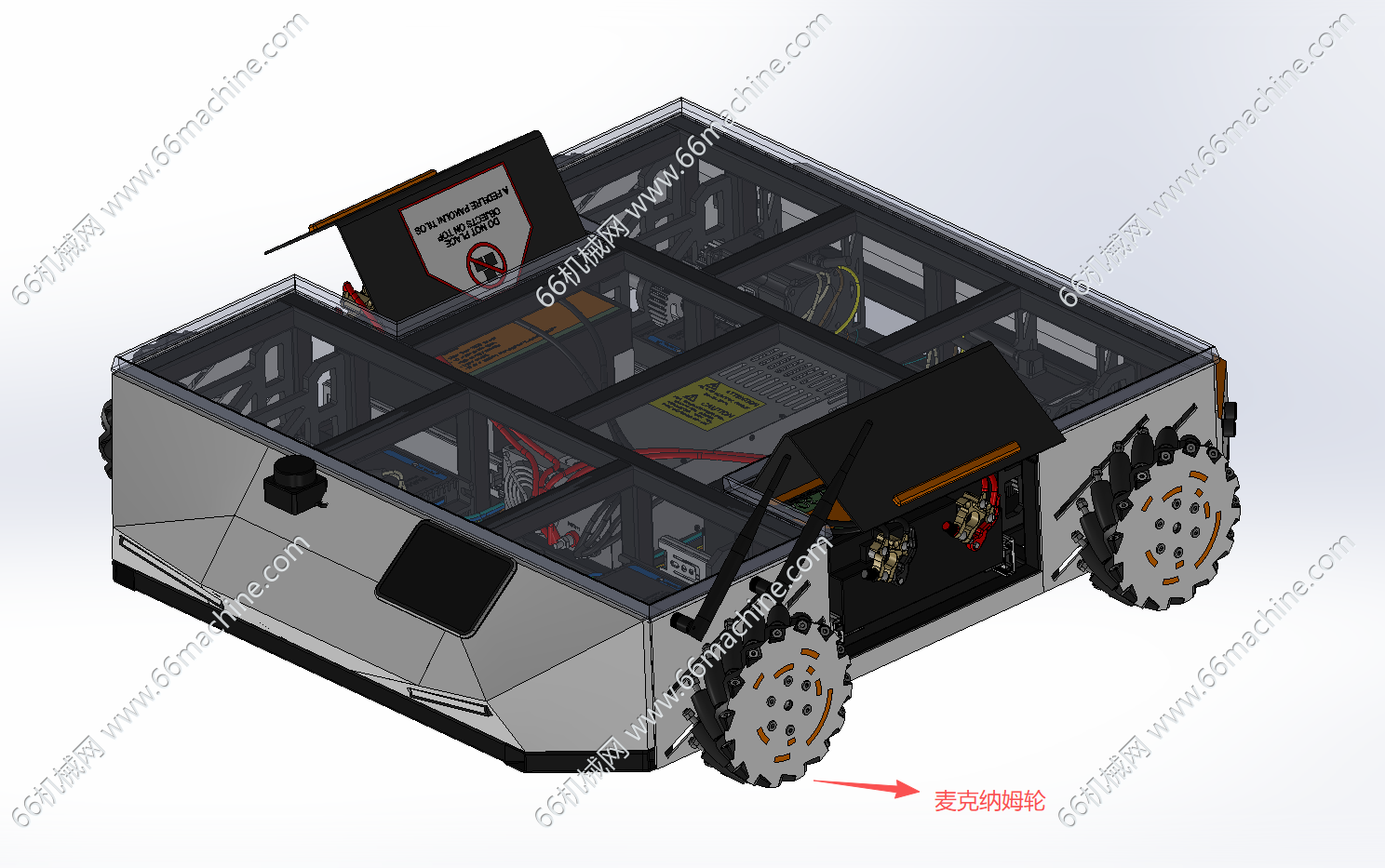
全向自动导引车.png
-
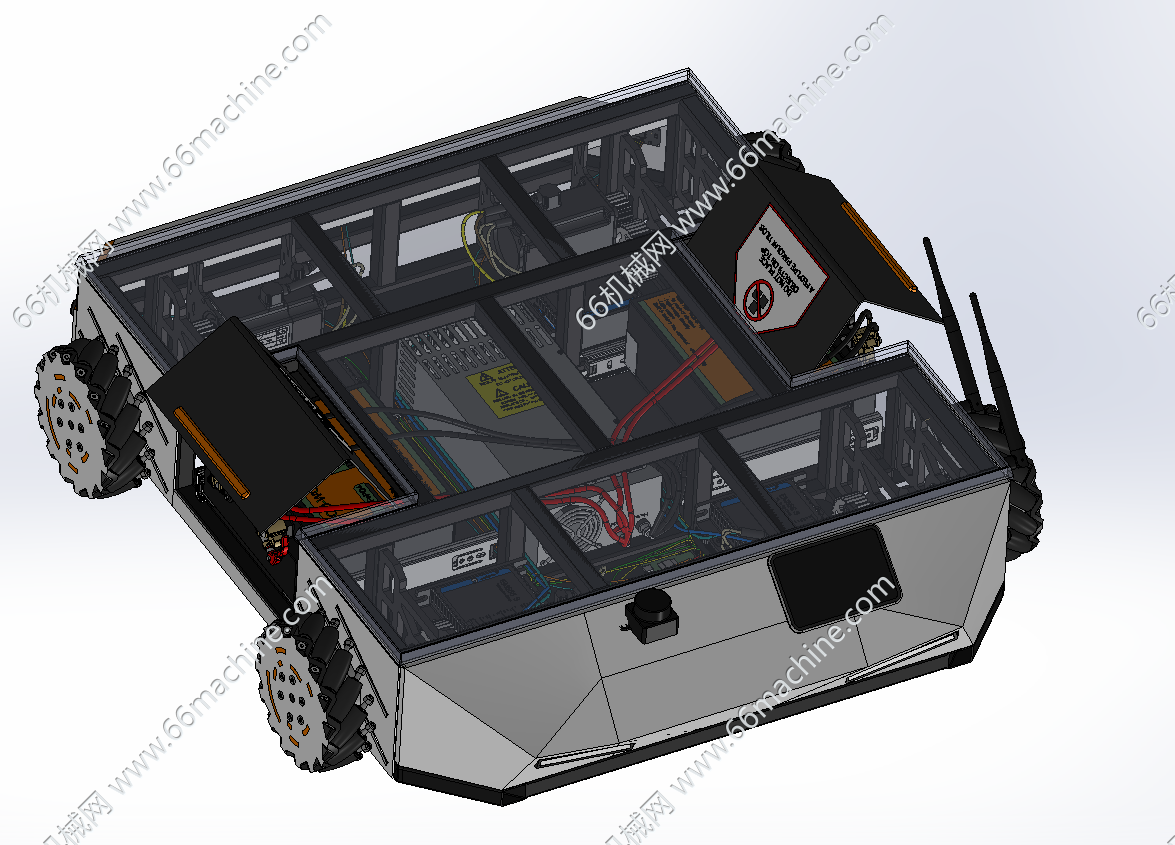
全向自动导引车轴测图.png
-
全向自动导引车主视图.png
-
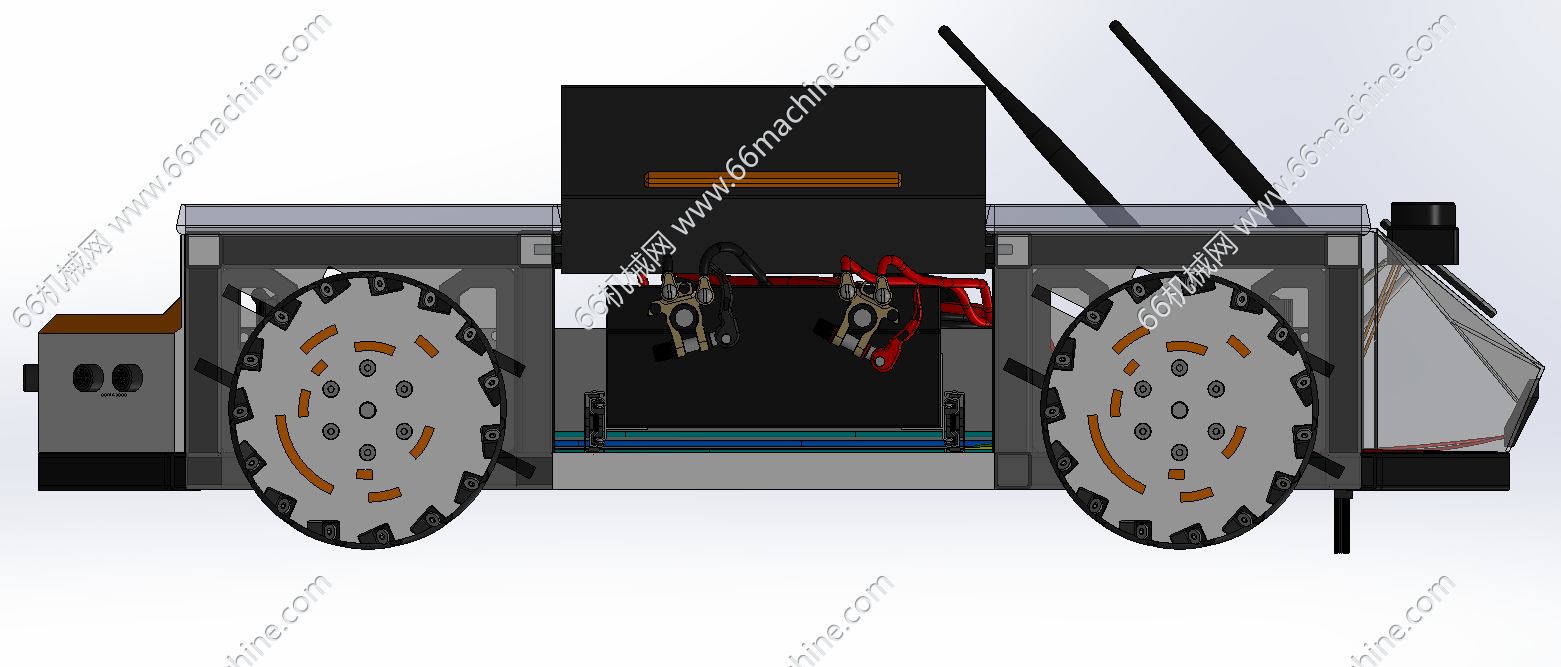
全向自动导引车侧视图.png
-
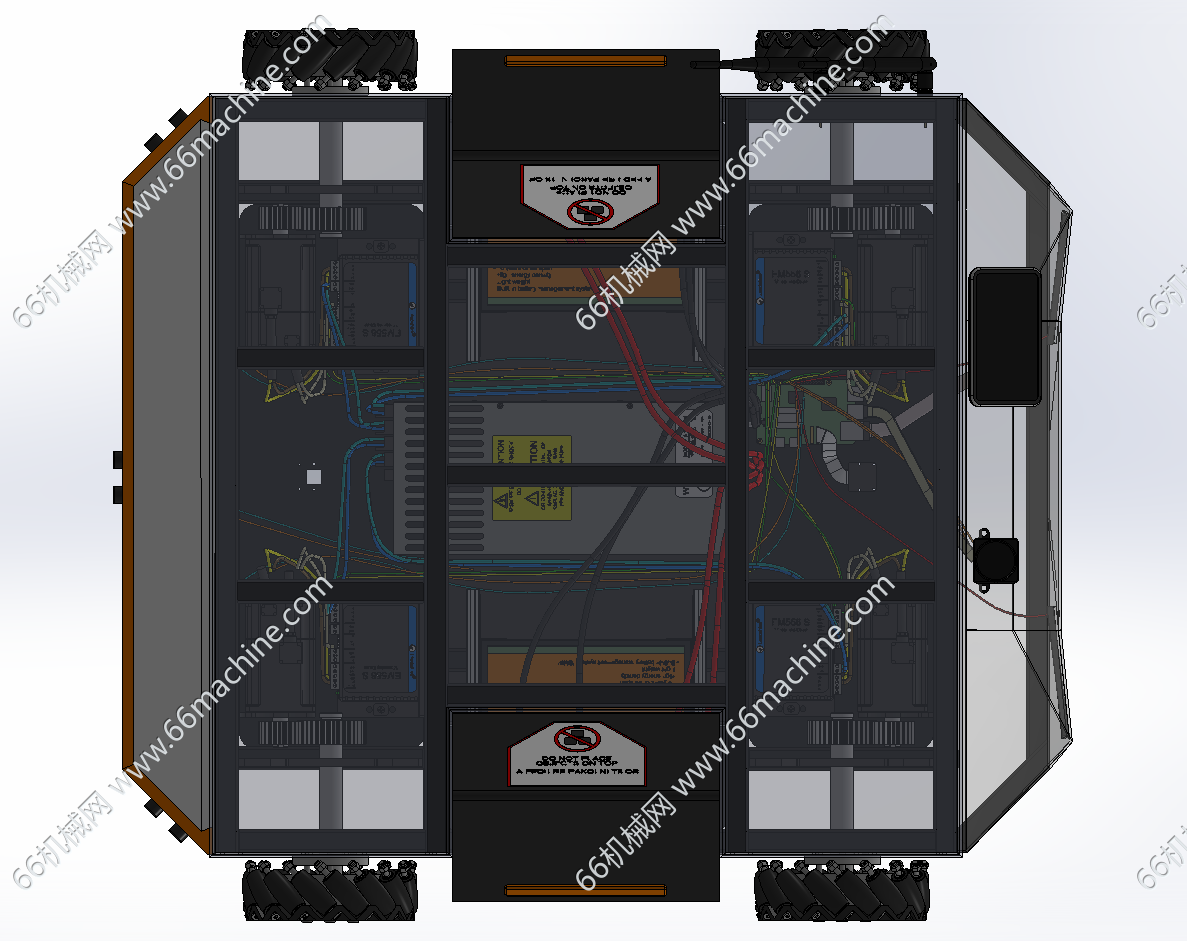
全向自动导引车俯视图.png
图纸描述
本模型为基于麦克纳姆轮的全向自动导引车(AGV),AGV是指具有磁条,轨道或者激光等自动导引设备,沿规划好的路径行驶,以电池为动力。常用于工厂、仓库等场所,可实现物料的自动搬运与运输,通过内置的导航系统和控制装置,自主规划路径、完成货物的转运工作,提升物流运输的自动化与效率。
