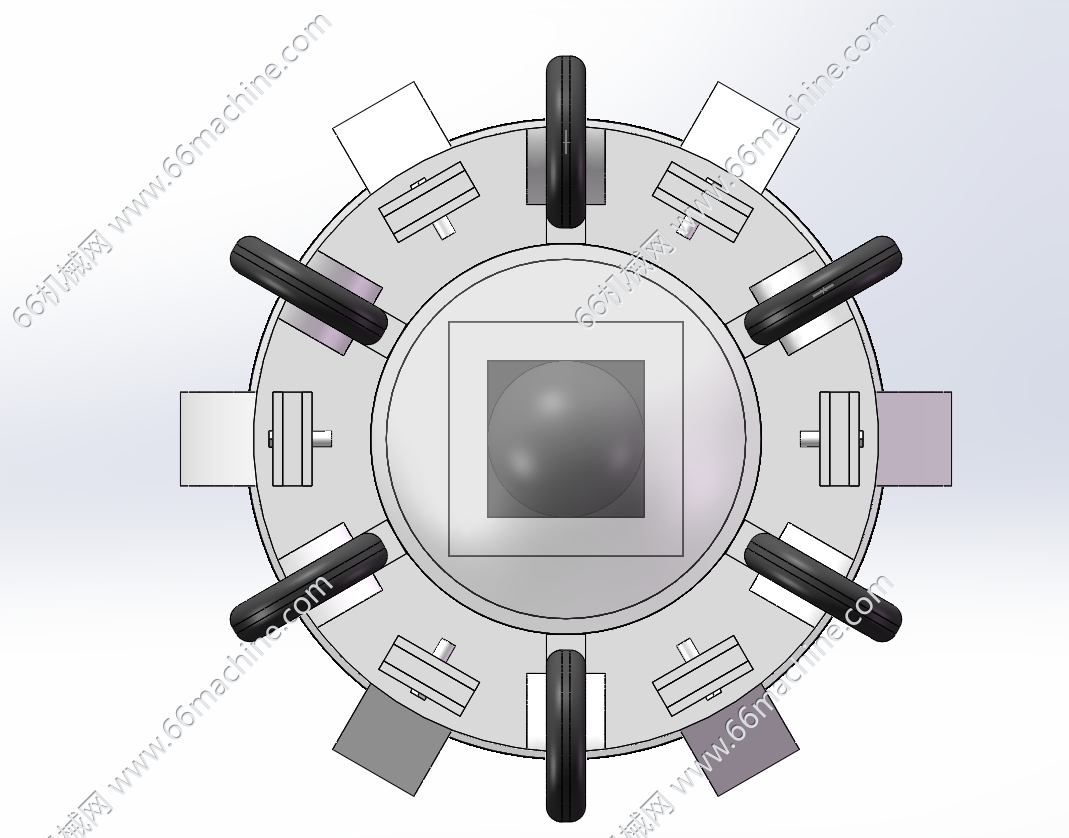
体内软体探测机器人(自适应弯曲、伸缩医疗探测装置)3D+工程图
发布时间:2025-07-08
-
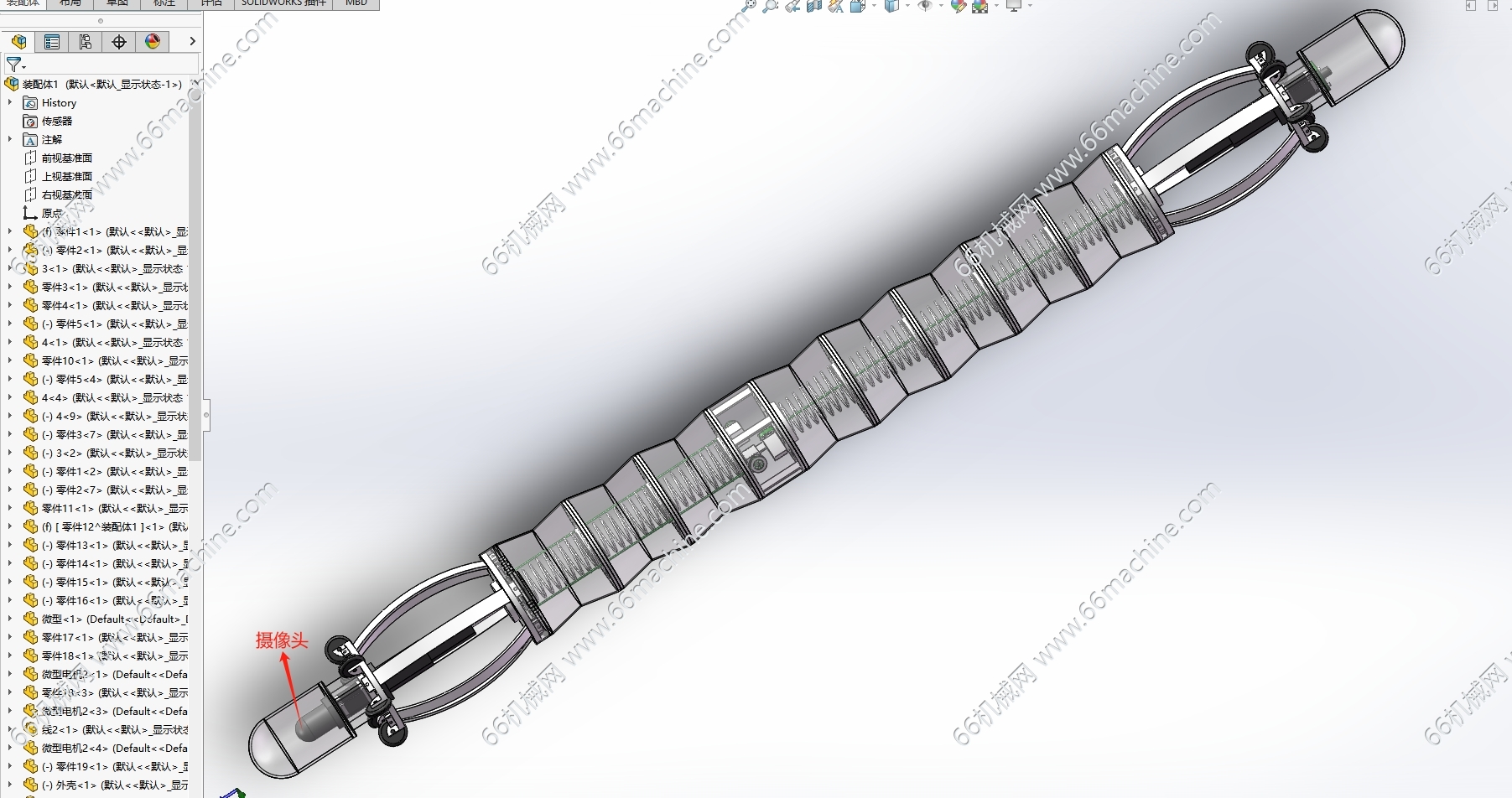
体内软体探测机器人.png
-
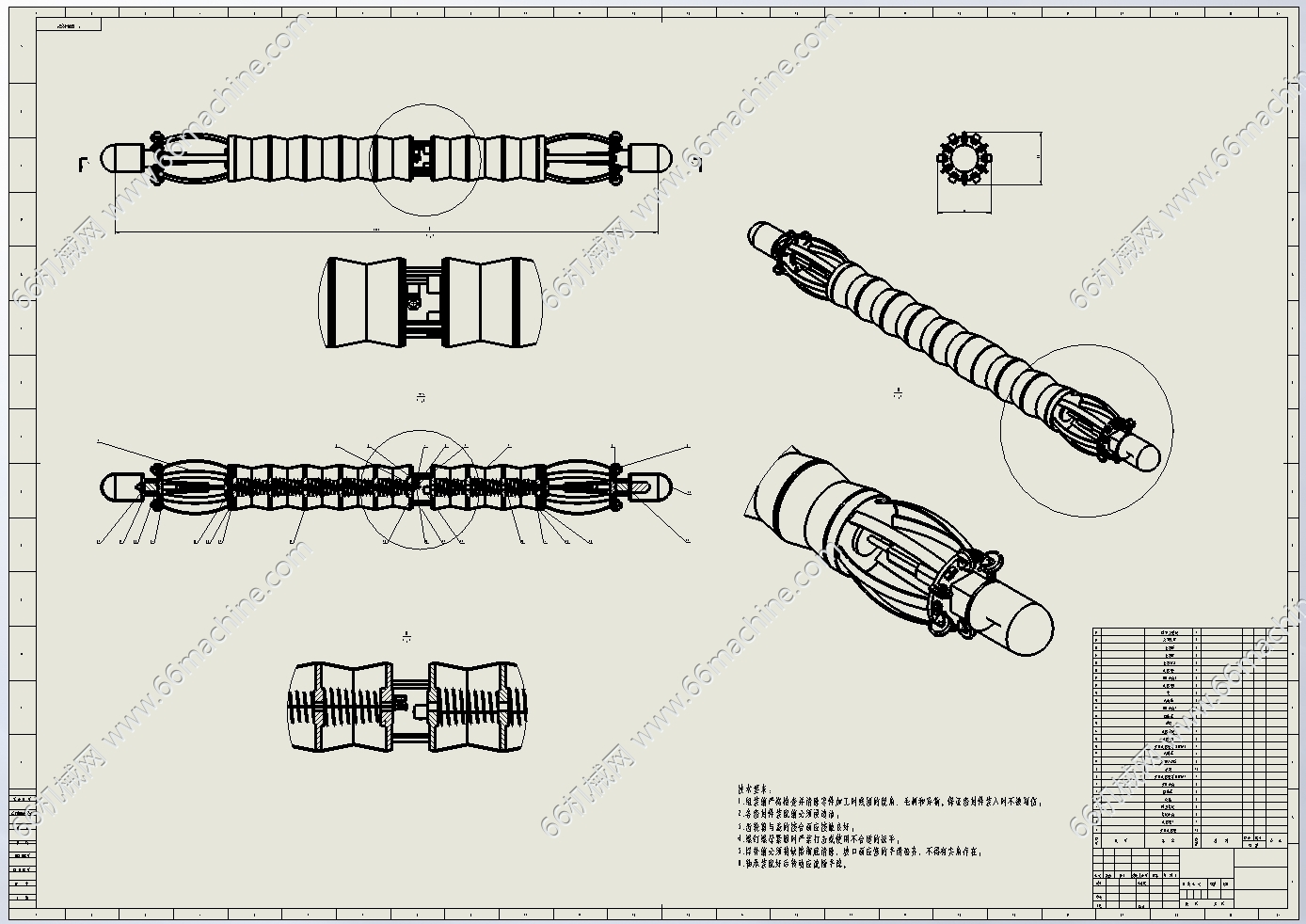
体内软体探测机器人工程图.png
-
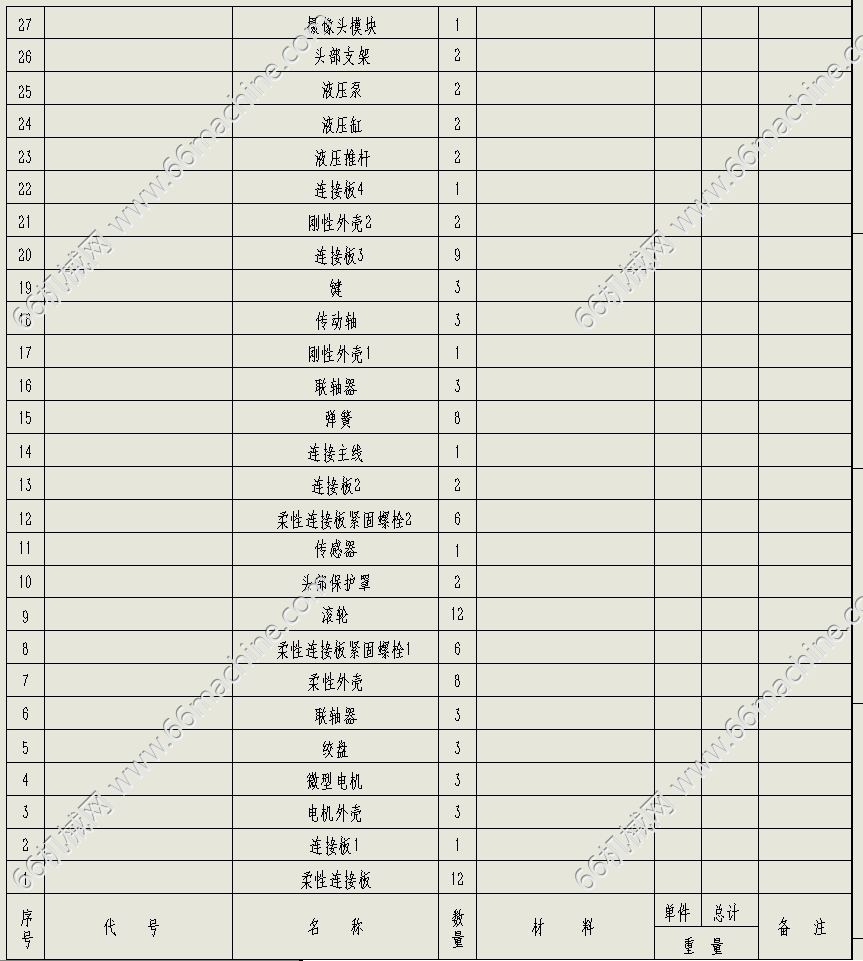
体内软体探测机器人工程图标注栏.png
-
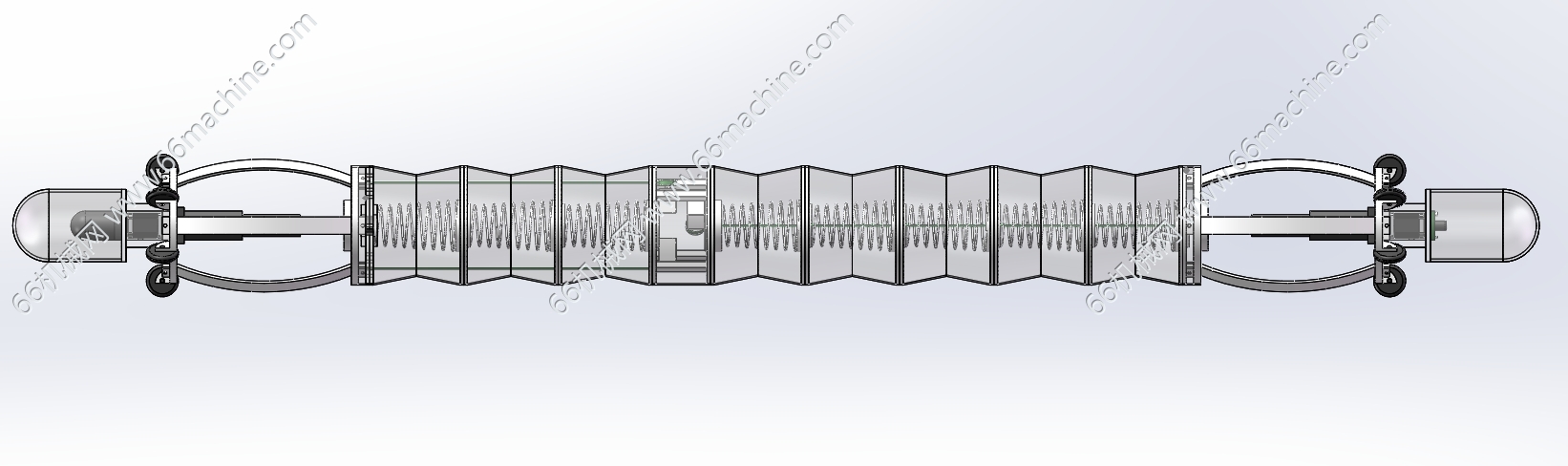
体内软体探测机器人主视图.png
-
体内软体探测机器人侧视图.png
-
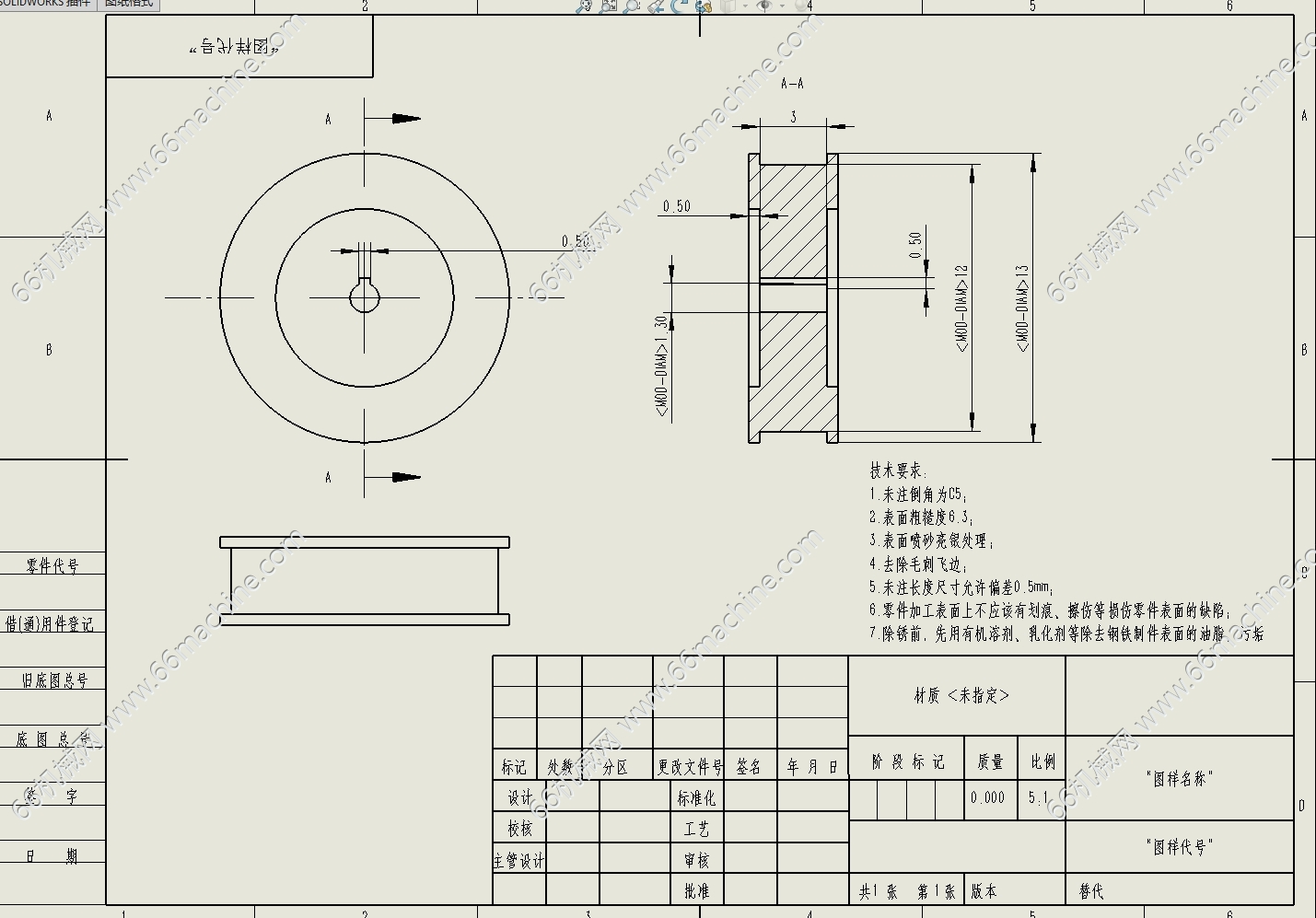
绞盘.png
-
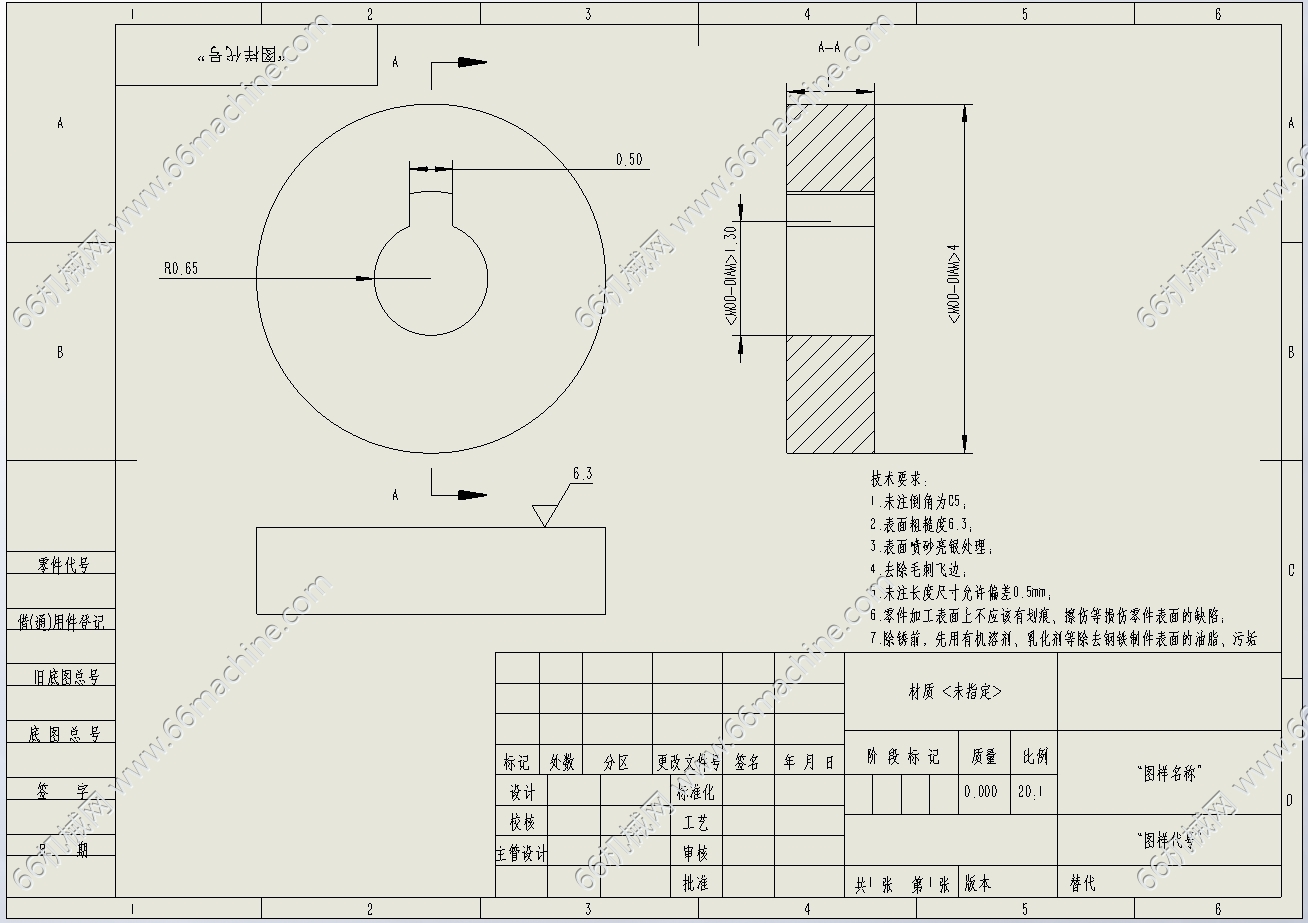
连接件.png
-

源文件.png
图纸描述
本模型为软体机器人(自适应弯曲、伸缩医疗探测装置),结构说明:1.柔性本体:采用硅胶/TPE材料模压成气动网络结构,内置分布式腔室实现多向形变。2.驱动方式:气压驱动(0-150kPa)或SMA形状记忆合金丝,实现弯曲/伸缩动作。3.传感集成:腔体内嵌光纤应变传感器,实时反馈形变姿态与接触力。4.功能设计:模块化单元串联组合,通过拓扑优化控制运动轨迹;表面微纹理增强摩擦。该软体机器人可自适应复杂环境,人机交互安全,医疗/探测场景适用性强。
