基于麦克纳姆轮的全向导航小车
发布时间:2025-07-22
-
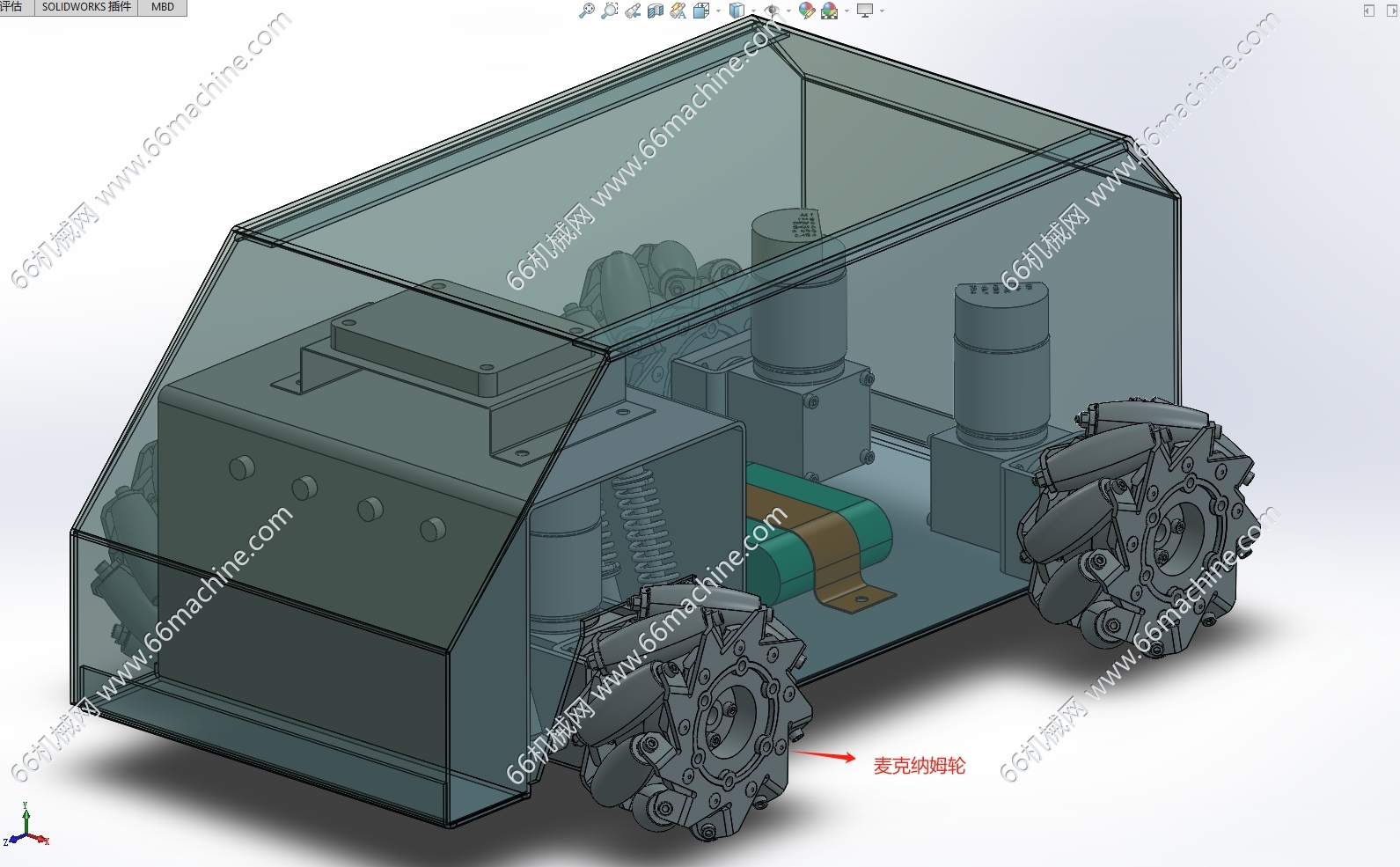
基于麦克纳姆轮的全向导航小车.png
-
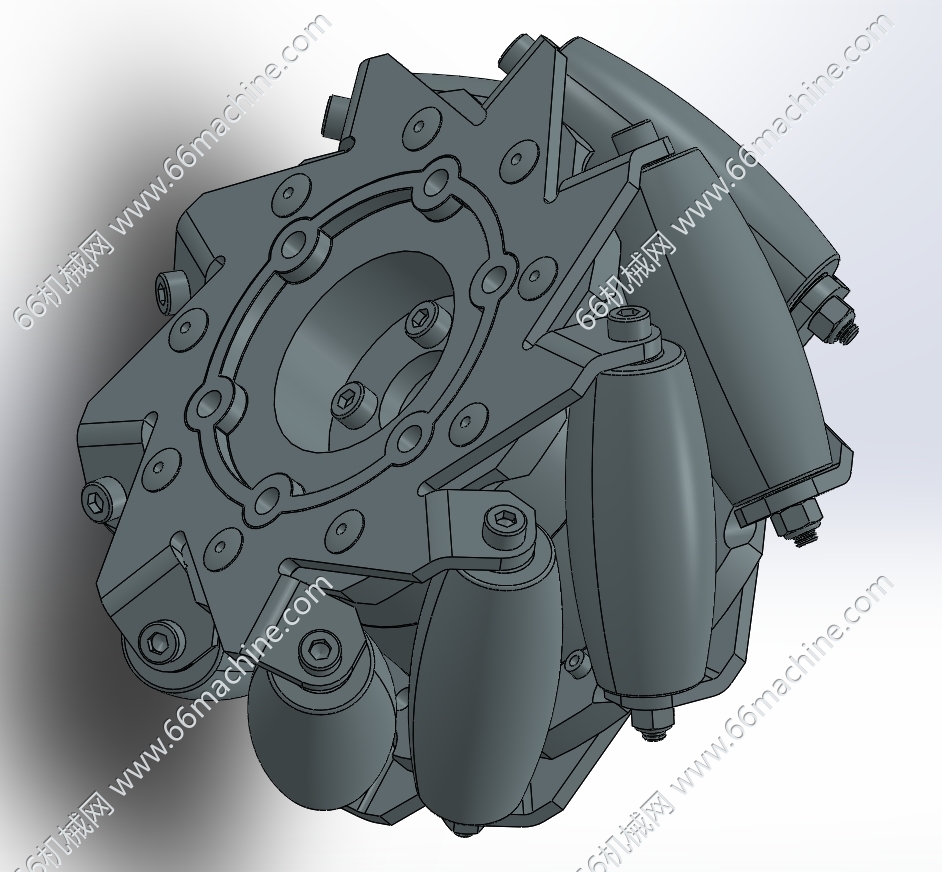
麦克纳姆轮.png
-
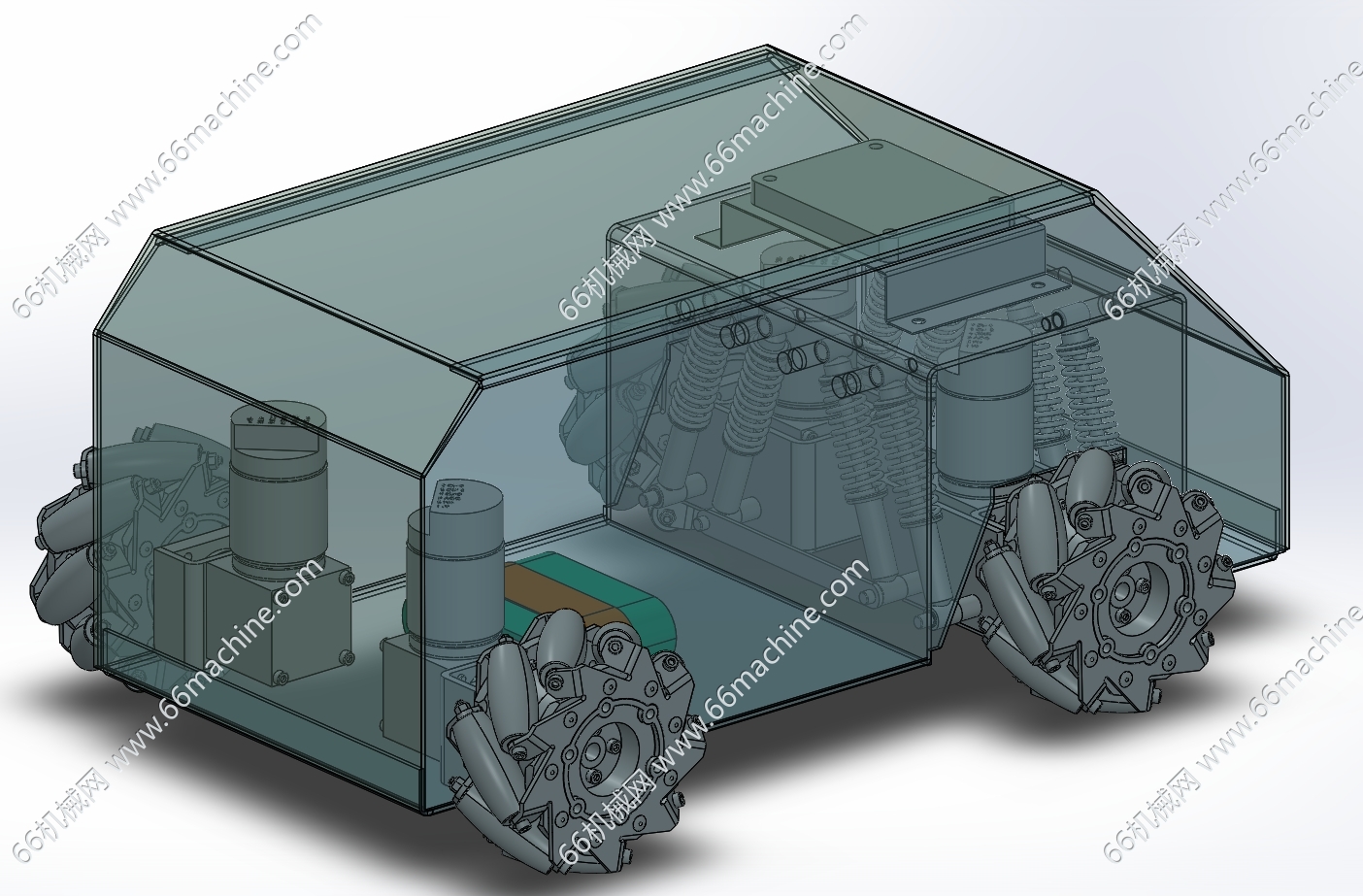
基于麦克纳姆轮的全向导航小车轴测图.png
-
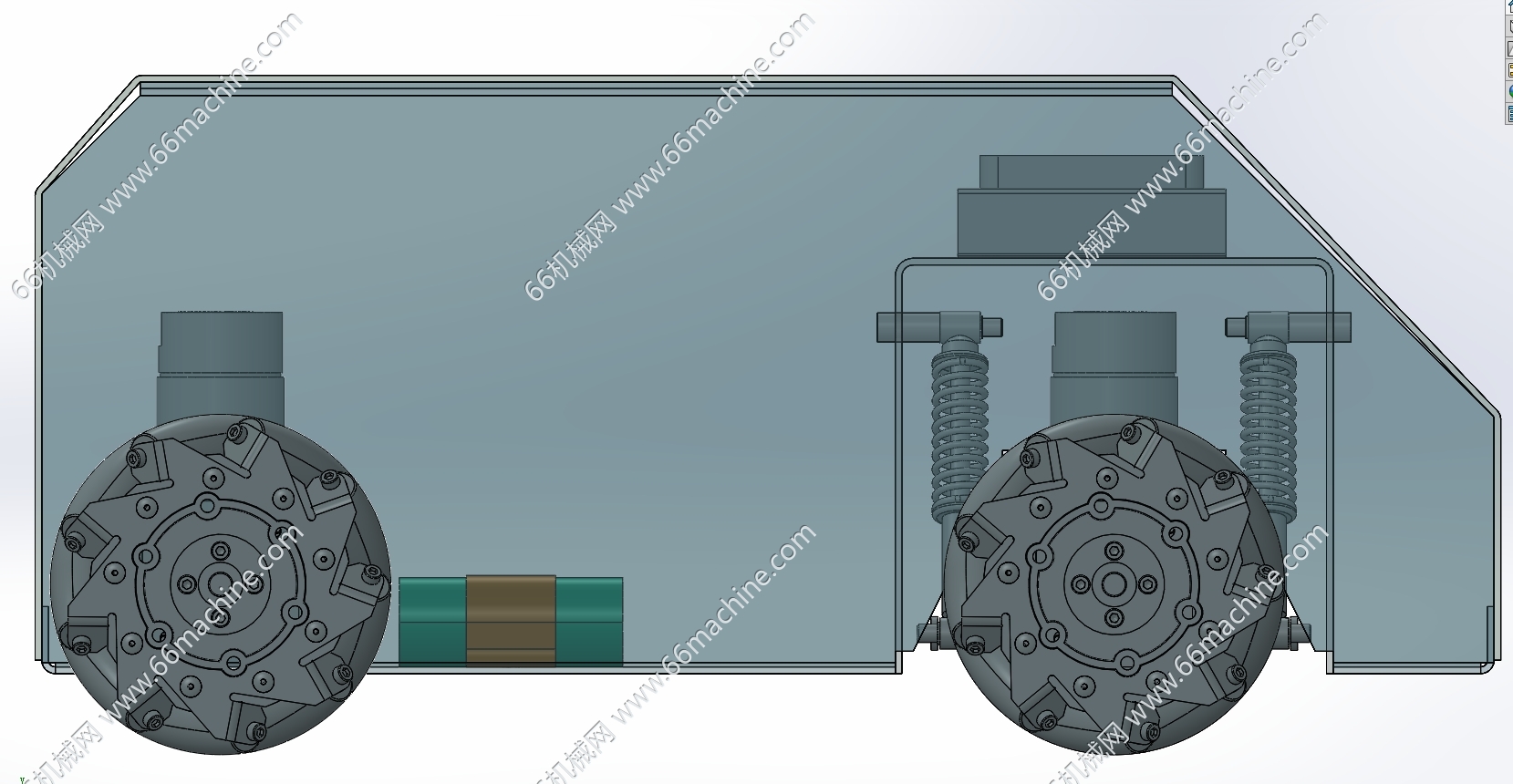
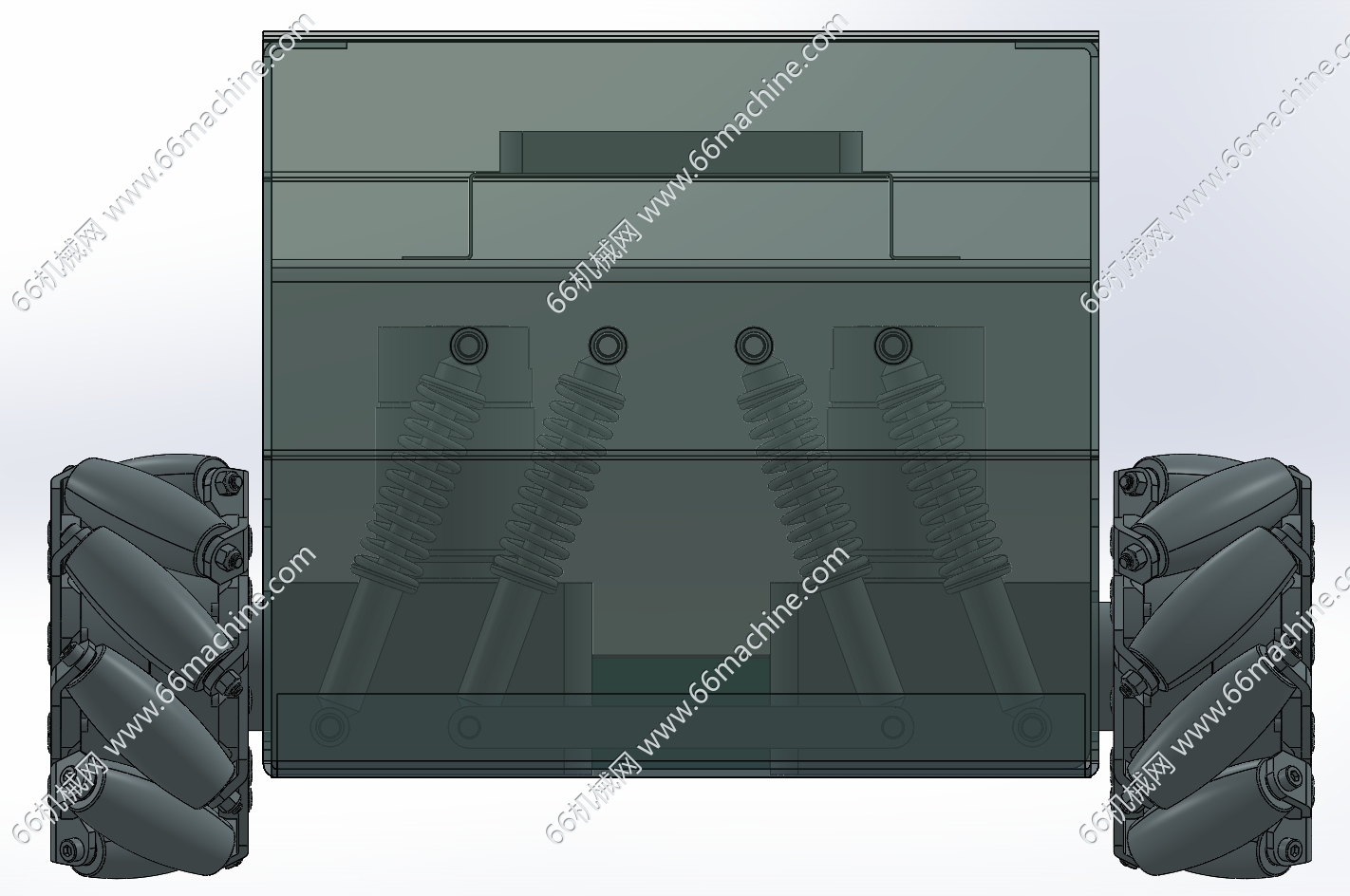
基于麦克纳姆轮的全向导航小车主视图.png
-
基于麦克纳姆轮的全向导航小车侧视图.png
-
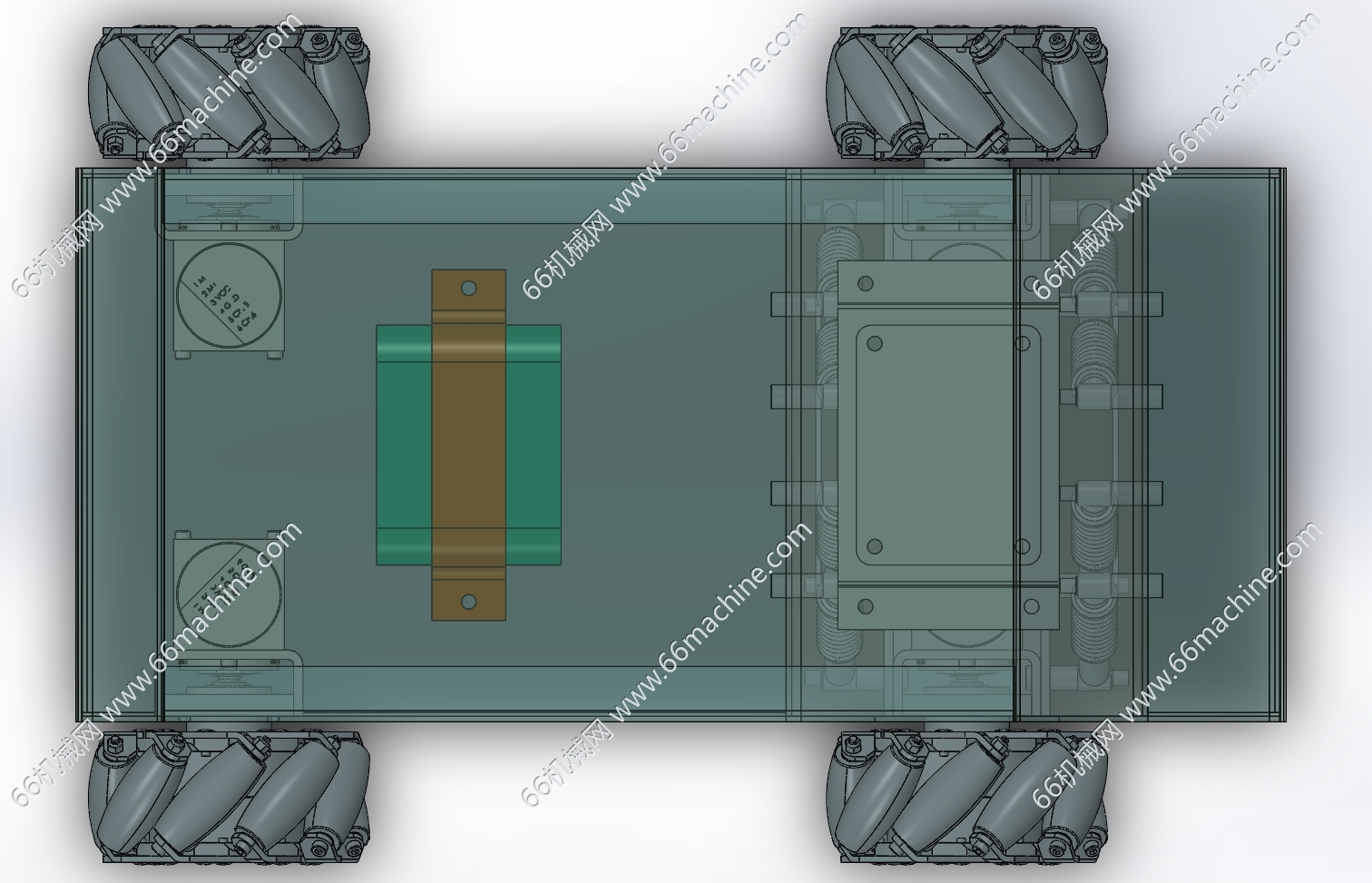
基于麦克纳姆轮的全向导航小车俯视图.png
图纸描述
本模型为基于麦克纳姆轮的全向导航小车,通过多轮独立驱动实现平面内任意方向的平移、旋转及组合运动,具备零转弯半径和高机动性。集成激光雷达、视觉SLAM或多传感器融合技术,支持自主定位、路径规划与动态避障。广泛应用于物流仓储(AGV)、智能制造(产线运输)、服务机器人及科研教育领域,其核心优势在于狭小空间内的灵活作业能力,关键技术涉及运动控制算法、高精度导航及多机协同调度系统。
