基于连杆结构的六轴夹取机器人.png
图纸预览.png
大臂.png
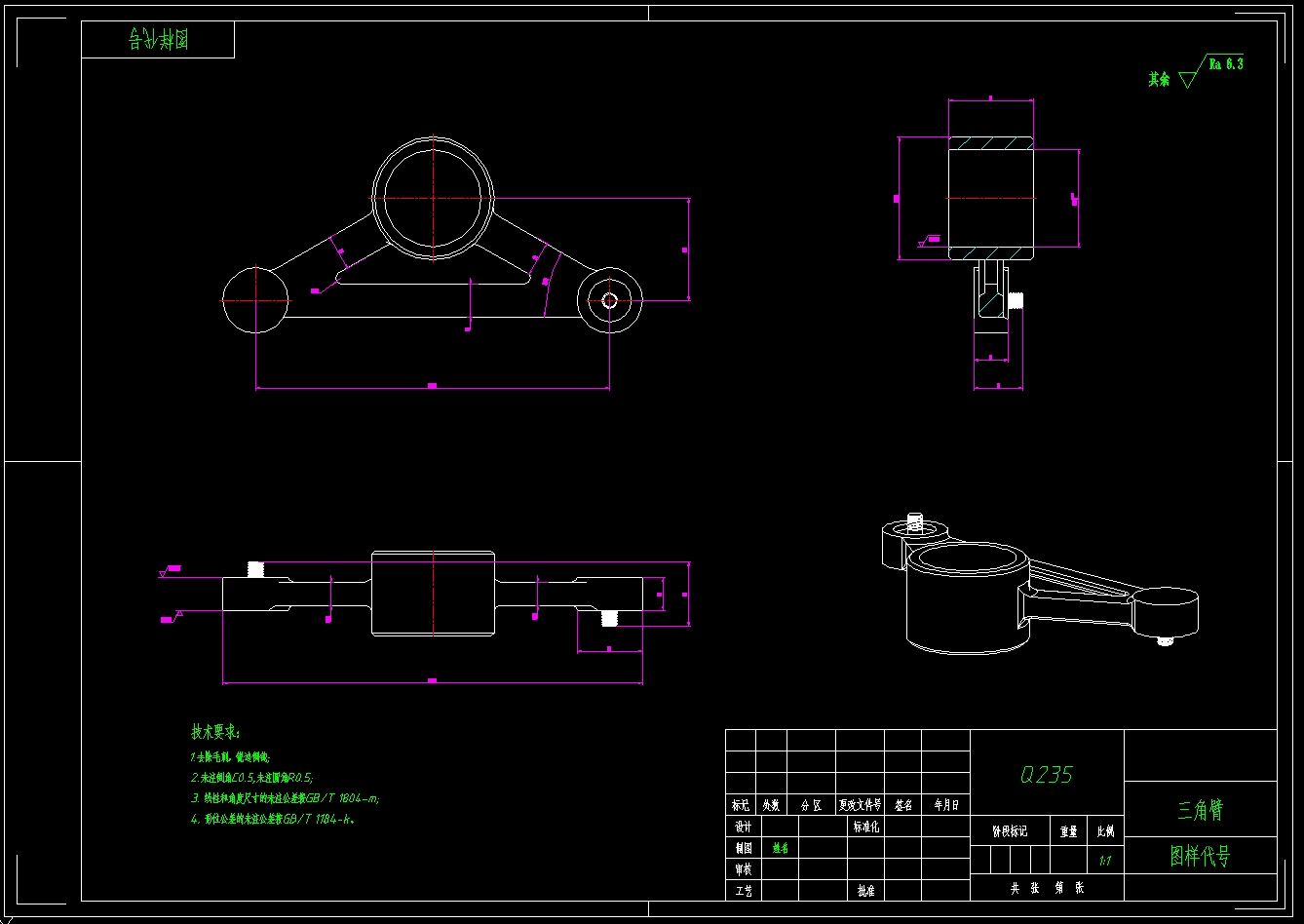
三角臂.png
夹爪手指.png
法兰.png
前臂.png
小臂.png
摇臂.png
本套图纸为基于连杆结构的六轴夹取机器人,采用坚实的底座,旋转式机械手,抓取货物伸缩自如,适用各种工作场合,夹爪可任意更换,根据应用场景使用不同的夹爪,可供大家参考!
非标设计
图纸ID: 96388294497145161
图纸格式:dwg
图纸版本:AutoCAD2007
文件大小:1.40MB
所需积分:30机械币
可否编辑: 可进行编辑,包含特征参数
关注人数:0人