基于曲柄摇杆的六足机器人.png
基于曲柄摇杆的六足机器人工程图.png
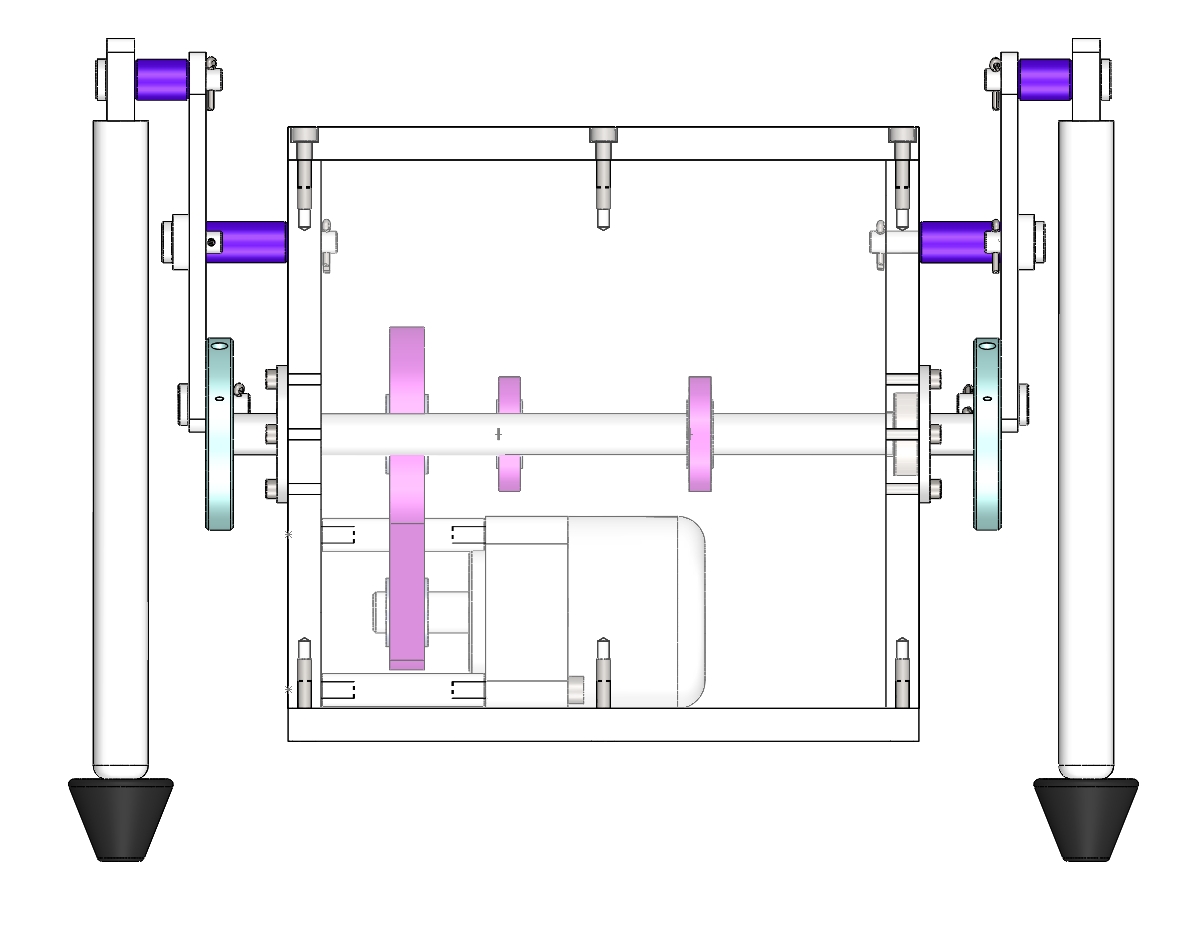
基于曲柄摇杆的六足机器人主视图.png
基于曲柄摇杆的六足机器人侧视图.png
基于曲柄摇杆的六足机器人俯视图.png
本模型为步行四边机器人(基于曲柄摇杆的六足机器人), 是一款利用曲柄摇杆机构做支撑腿实现移动的机器人,在箱体的两侧有曲柄摇杆机构,可供大家参考!
非标设计
图纸ID: 96388294492953875
图纸格式:SLDPRT、sldasm、sldprt、SLDASM、SLDDRW
图纸版本:Solidworks2020
文件大小:9.07MB
所需积分:40机械币
可否编辑: 可进行编辑,包含特征参数
关注人数:0人