基于丝杠结构的并联机器人.png
基于丝杠结构的并联机器人主视图.png
基于丝杠结构的并联机器人俯视图.png
源文件.png
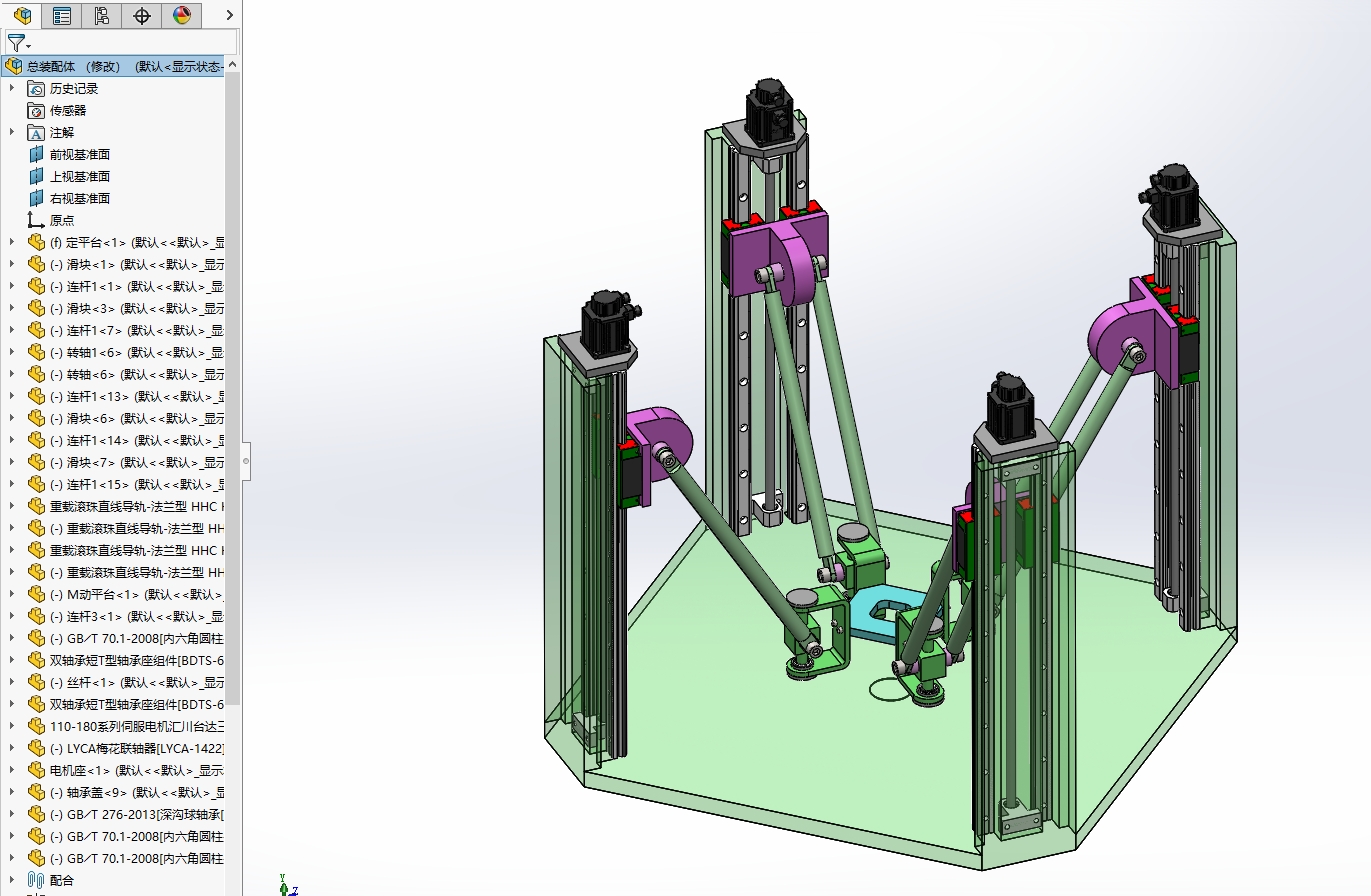
并联机器人,英文名为Parallel Mechanism,简称PM,可以定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。SW建模,包含参数,可编辑修改。
非标设计
图纸ID: 96388294492952853
图纸格式:sldprt、SLDPRT、SLDASM、sldasm
图纸版本:Solidworks2018
文件大小:11.87MB
所需积分:30机械币
可否编辑: 可进行编辑,包含特征参数
关注人数:0人