带夹持及吸盘的机器人(机械车)
发布时间:2024-11-26
-

带夹持及吸盘的机器人.png
-

带夹持及吸盘的机器人细节.png
-
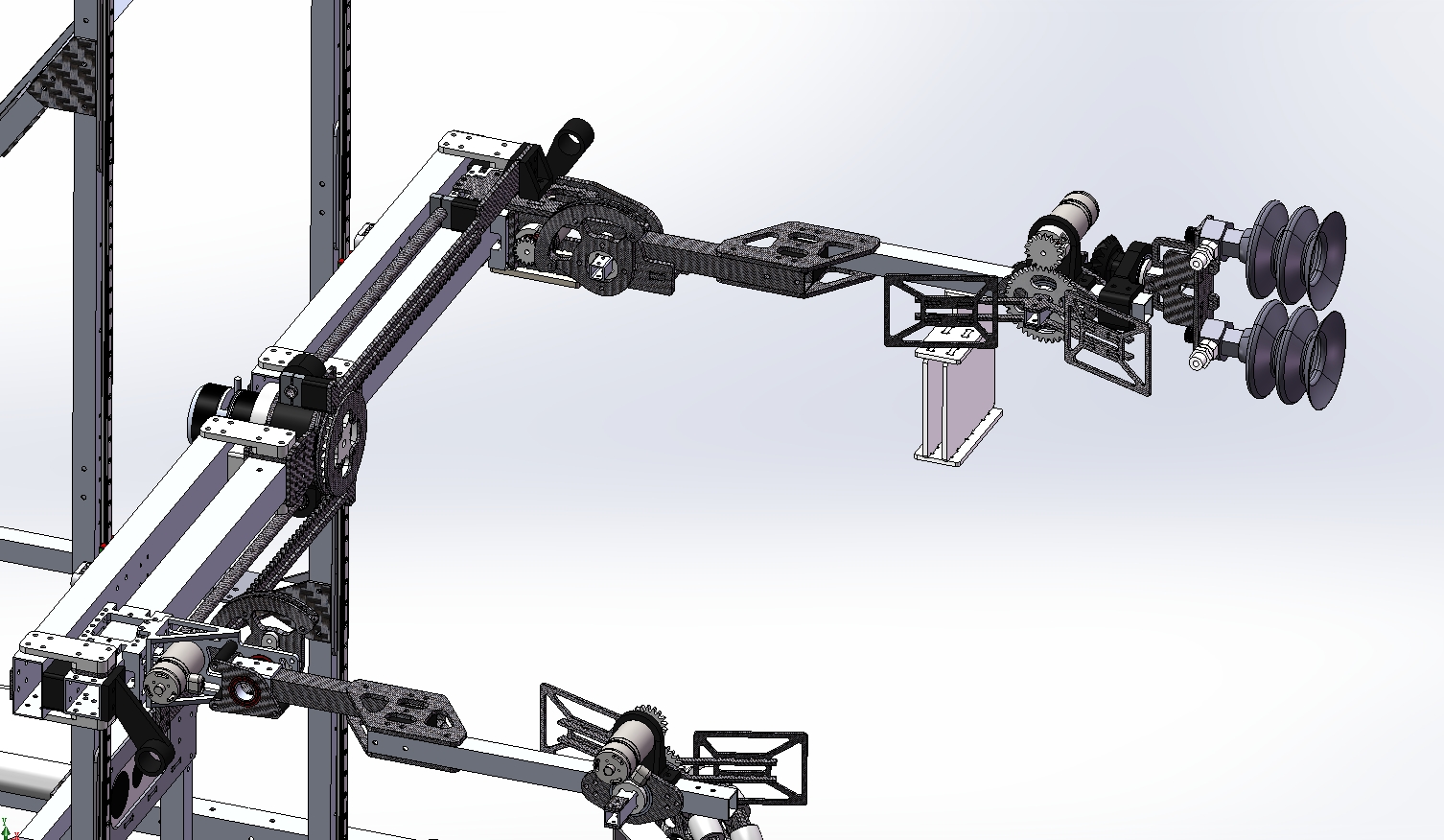
夹持及吸盘结构.png
-

舵轮(含麦克纳姆轮).png
-

全向轮.png
-

带夹持及吸盘的机器人轴测图.png
-

带夹持及吸盘的机器人主视图.png
-

带夹持及吸盘的机器人侧视图.png
-

带夹持及吸盘的机器人俯视图.png
-

激光雷达.png
图纸描述
本模型为带夹持及吸盘的机器人(机械车),采用四组独立全向轮驱动,采用麦克纳姆轮的舵轮组件进行方向控制,夹持采用齿轮齿条结构实现相向运动,本模型建模精巧,可供大家参考!
