基于丝杠移送的多工位抓取机构.png
基于丝杠移送的多工位抓取机构轴测图.png
基于丝杠移送的多工位抓取机构主视图.png
基于丝杠移送的多工位抓取机构侧视图.png
基于丝杠移送的多工位抓取机构俯视图.png
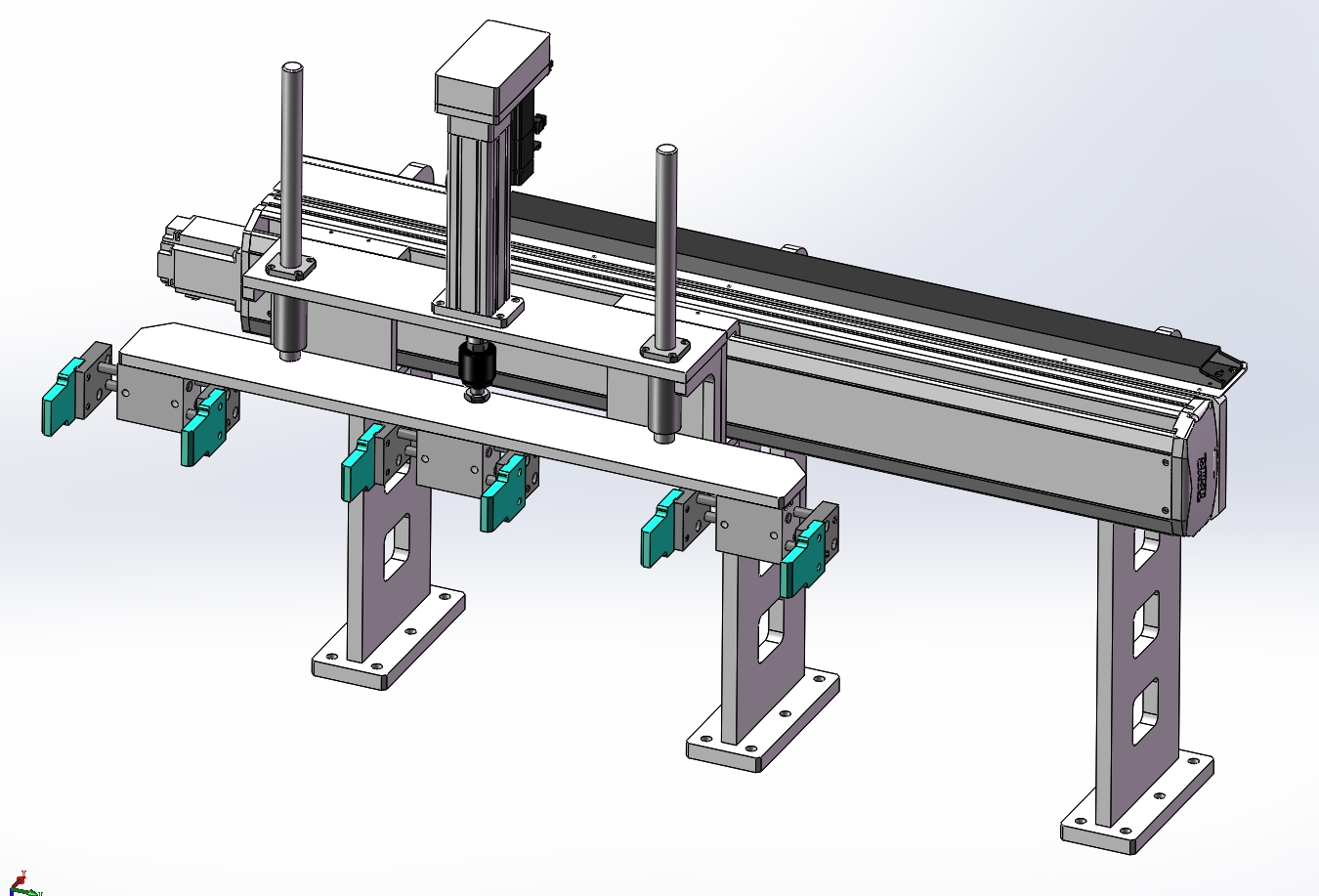
本模型为基于丝杠移送的多工位抓取机构,X轴采用丝杆导轨伺服模组,Z轴采用伺服电缸以及导柱直线轴承,三工位间距400MM,可同步搬运三个工件,机构后侧配有拖链防止缠绕,可供大家参考!
非标设计
图纸ID: 96388294492951918
图纸格式:SLDPRT、SLDASM、sldprt
图纸版本:Solidworks2021
文件大小:6.96MB
所需积分:10机械币
可否编辑: 可进行编辑,包含特征参数
关注人数:0人