6自由度云台机械臂(机械手)3D+CAD【末端:齿轮连杆抓手(夹爪)】
发布时间:2024-11-11
-

6自由度云台机械臂(机械手).png
-

6自由度云台机械臂(机械手)总图.png
-
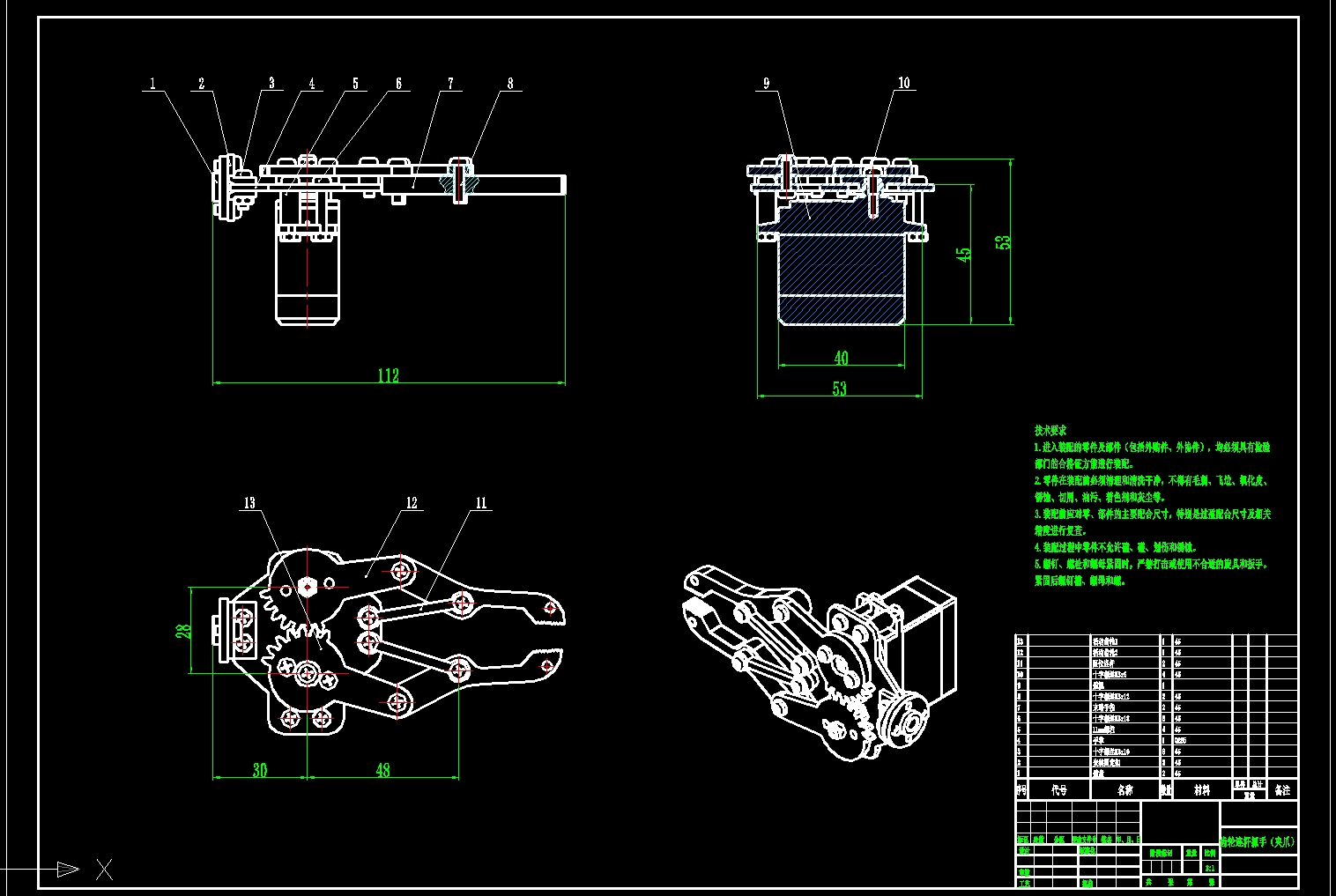
齿轮连杆抓手(夹爪).png
-

6自由度云台机械臂(机械手)纵剖图.png
-

资料总览.png
-

多功能支架.png
-

L型支架.png
-

安装圆盘.png
-

大底板.png
-

长U支架.png
图纸描述
本设计为6自由度云台机械臂(机械手),由六个关节组成,使用六个伺服电机来实现简单的手部结构,进行三个平移和三个旋转运动,即一个简单的物体有六个自由度,机械臂末端采用齿轮连杆抓手(夹爪),可供大家参考!
