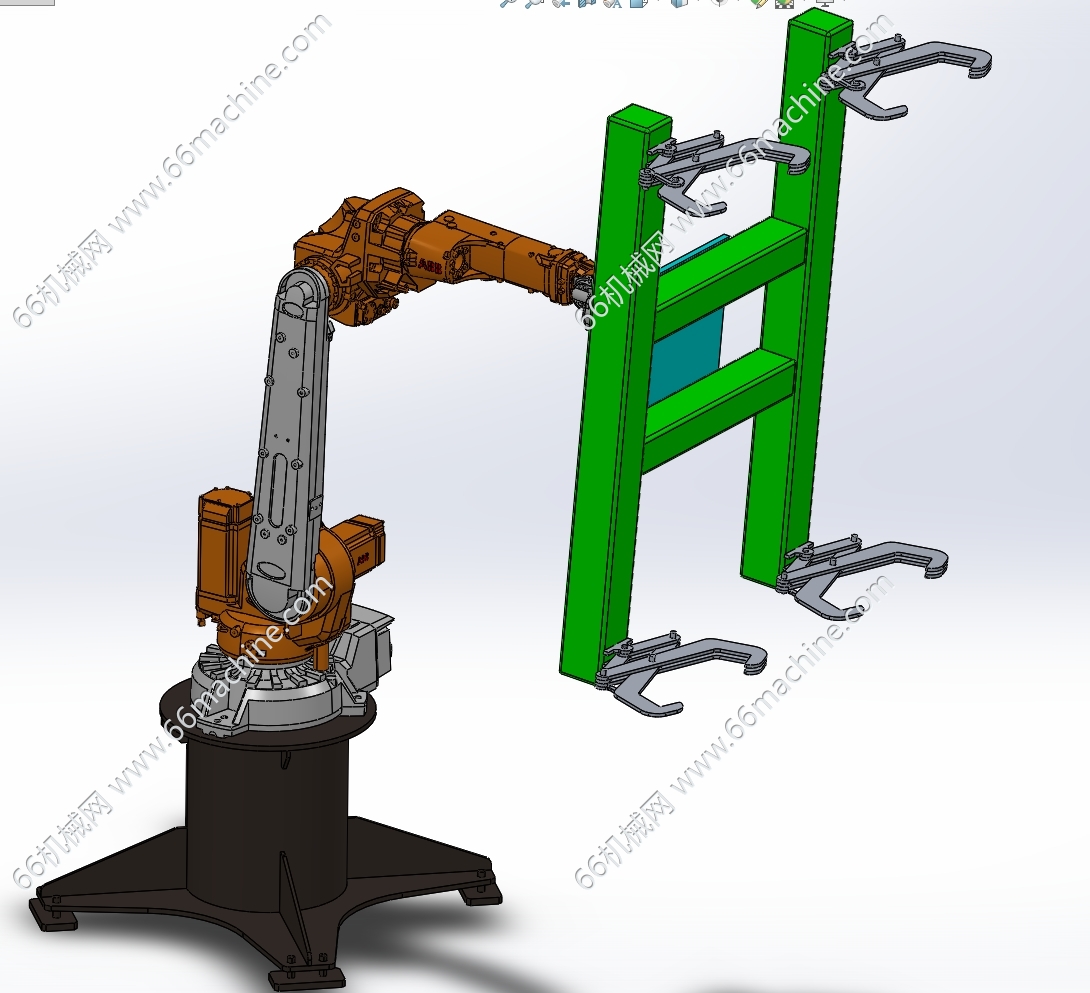
基于六轴机器人的管柱件抓具.png
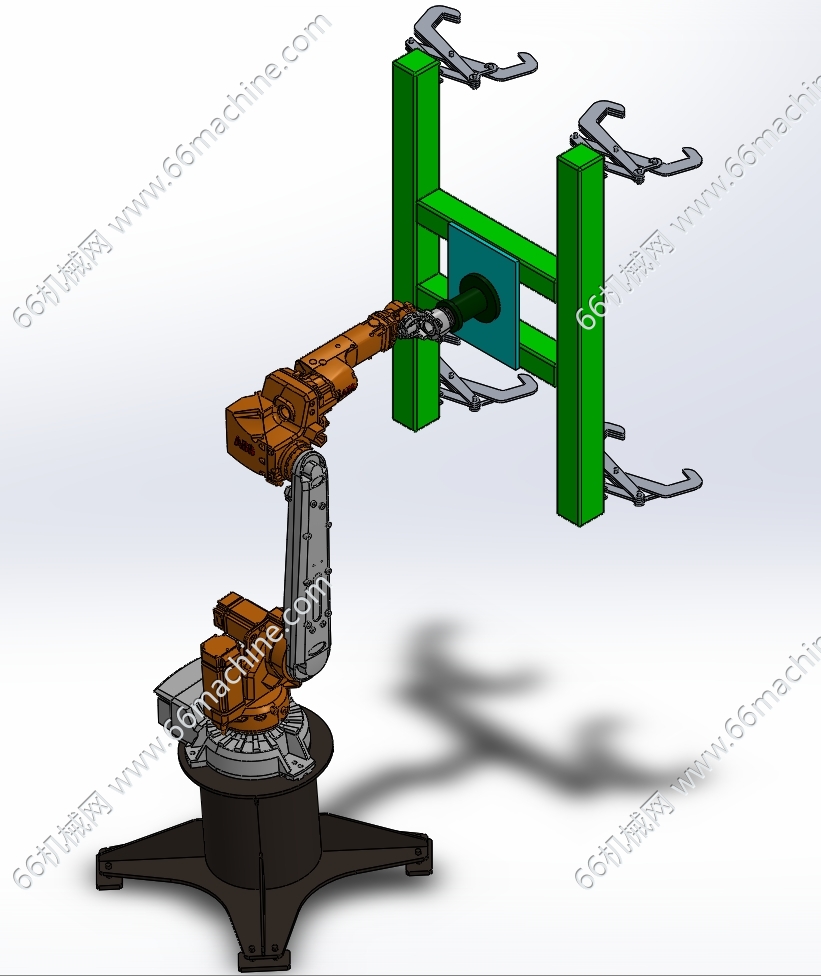
基于六轴机器人的管柱件抓具轴测图.png
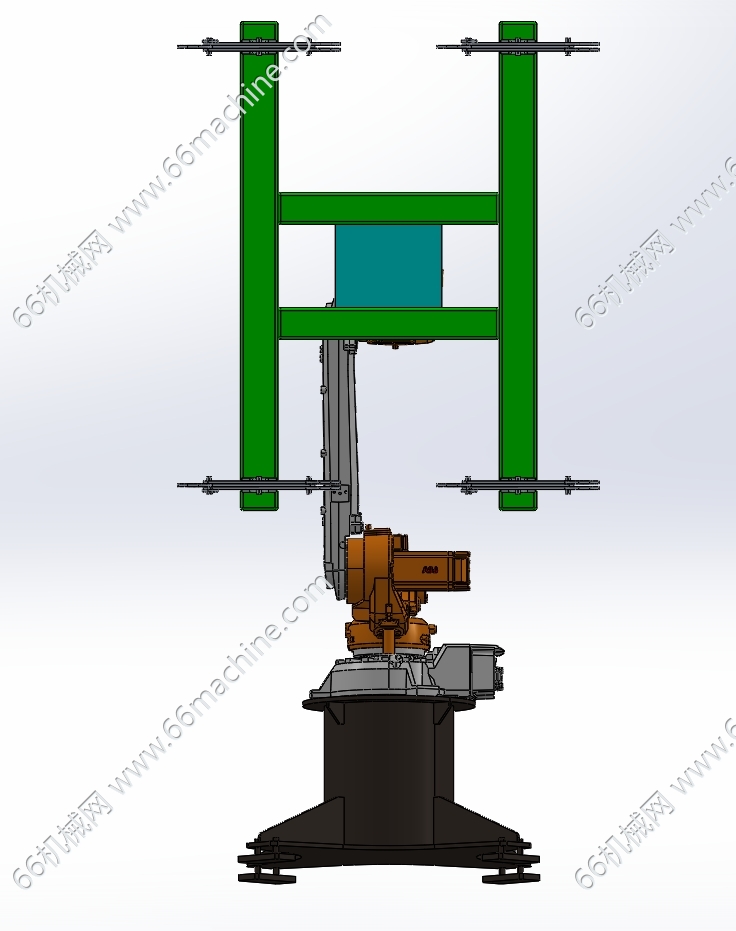
基于六轴机器人的管柱件抓具主视图.png
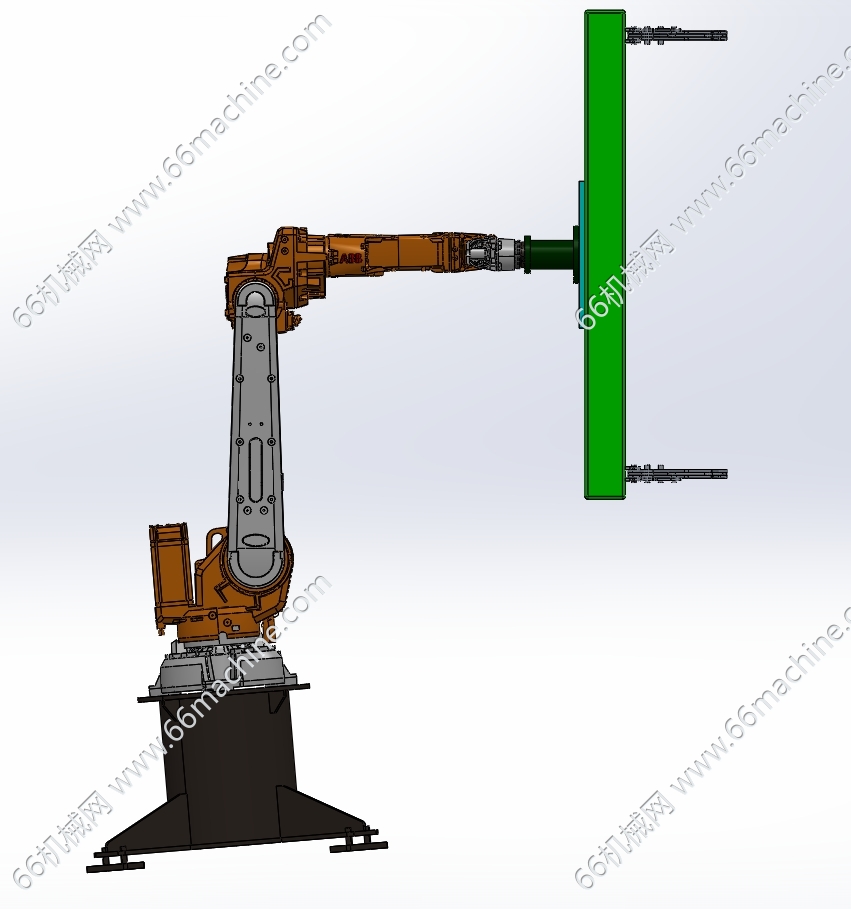
基于六轴机器人的管柱件抓具侧视图.png
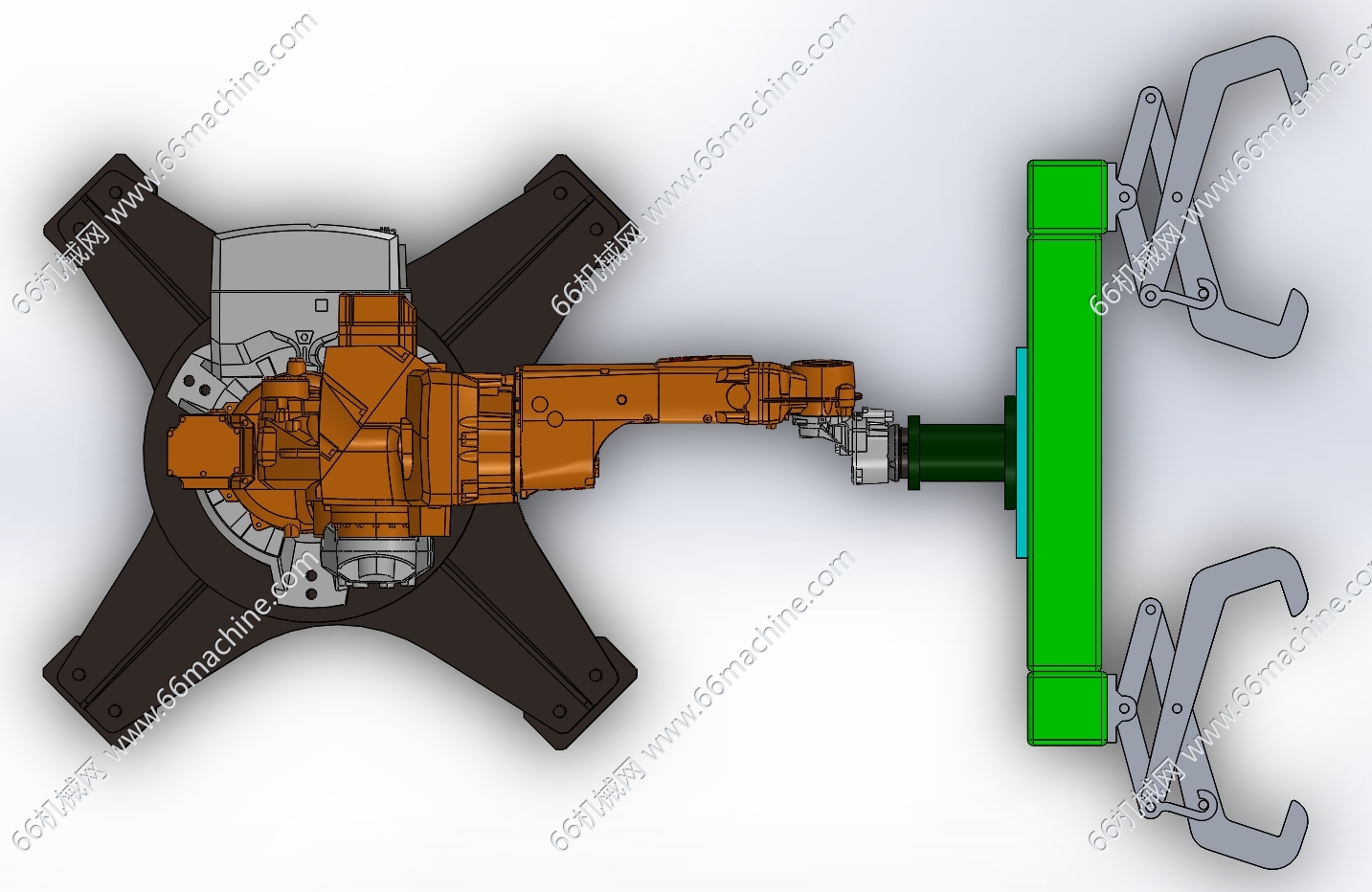
基于六轴机器人的管柱件抓具俯视图.png
本模型为基于六轴机器人的管柱件抓具,使用四边形的铰链结构,可在向上抓取时利用管柱件的自身重力达到夹紧的作用,同时可抓取2根管柱件,x-t格式,可供大家参考!
朝花夕拾啊
图纸ID: 315092070404592536
图纸格式:x_t
图纸版本:其它模型软件
文件大小:3.92MB
所需积分:20机械币
可否编辑: 可进行编辑,不包含参数
关注人数:0人