龙门桁架搬运机械手(直角坐标机器人)
发布时间:2026-02-03
-
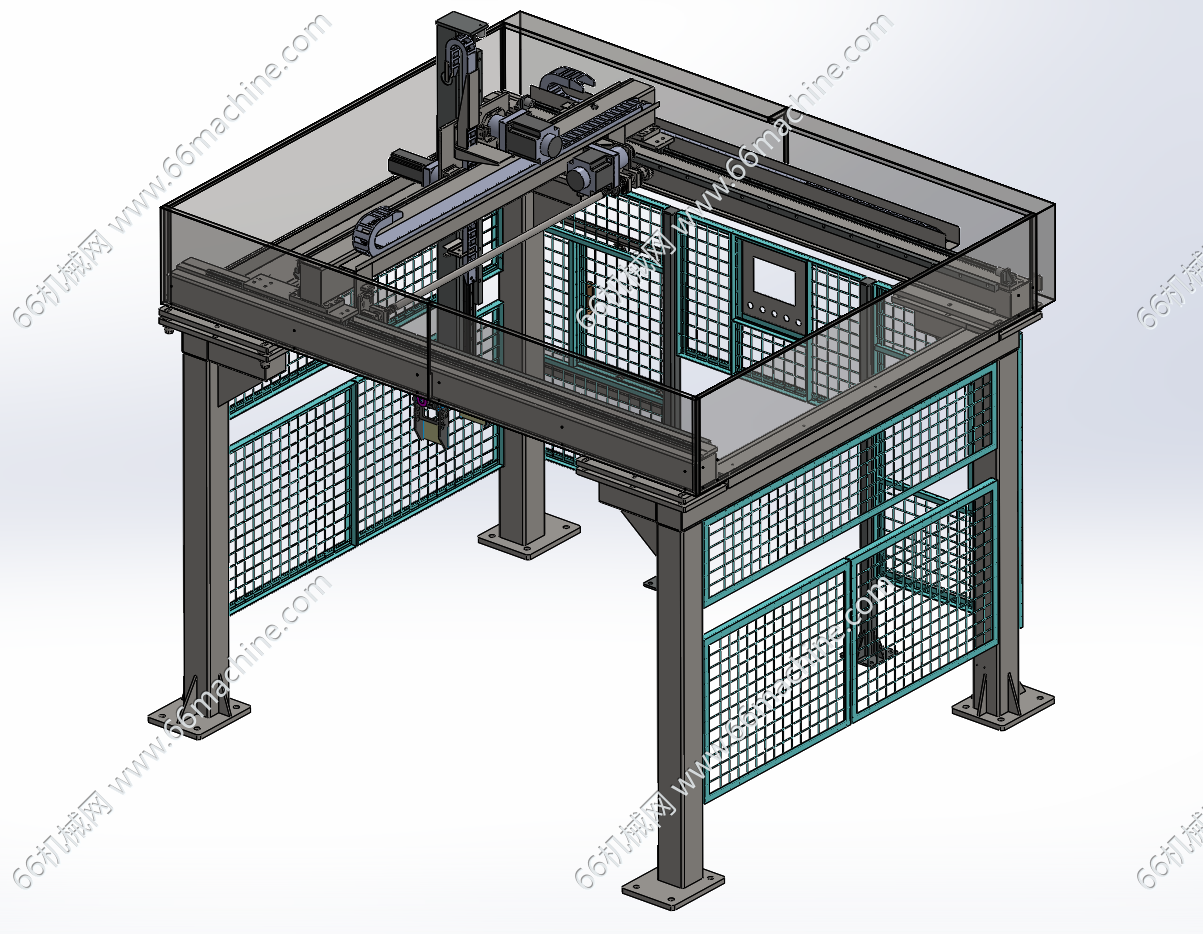
龙门桁架搬运机械手.png
-
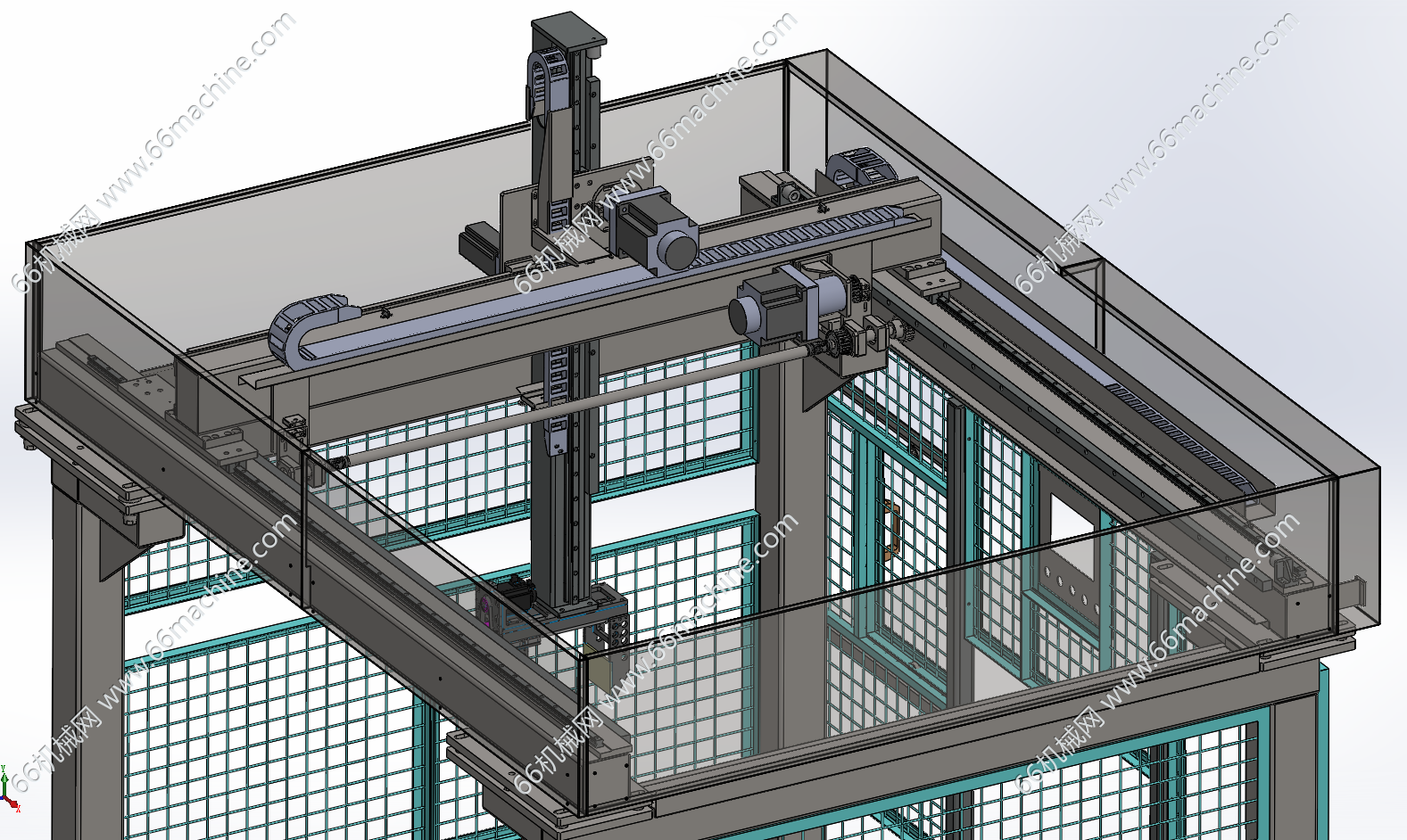
三轴夹取细节.png
-
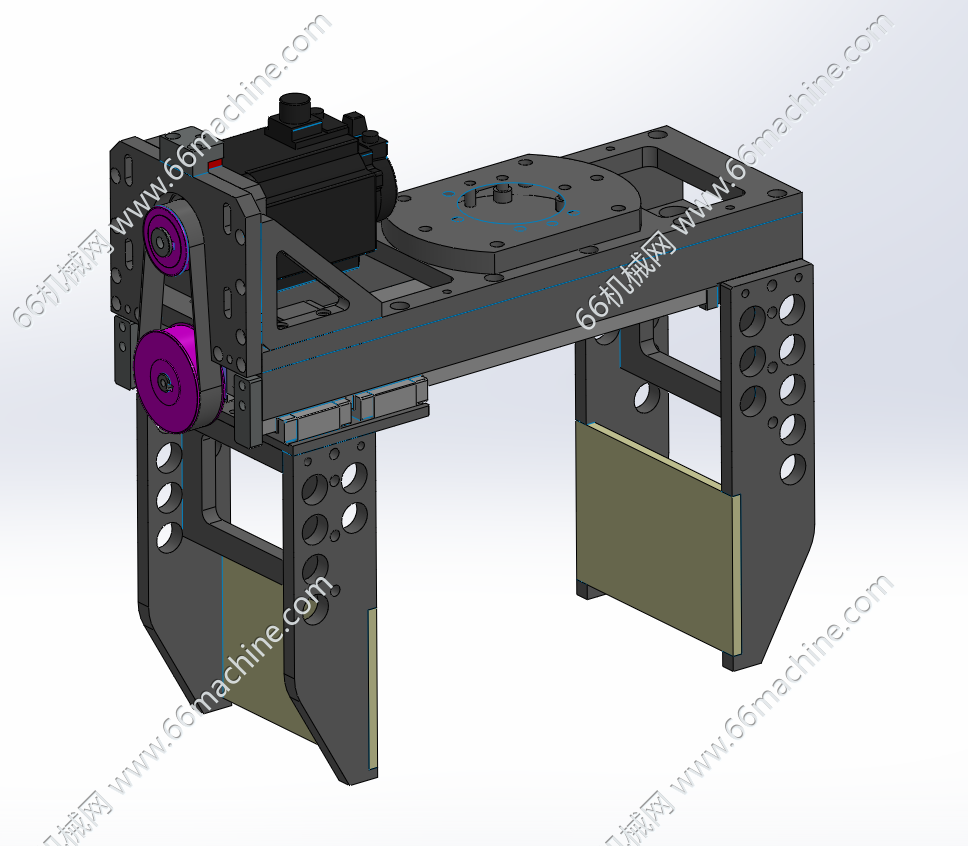
伺服夹爪.png
-
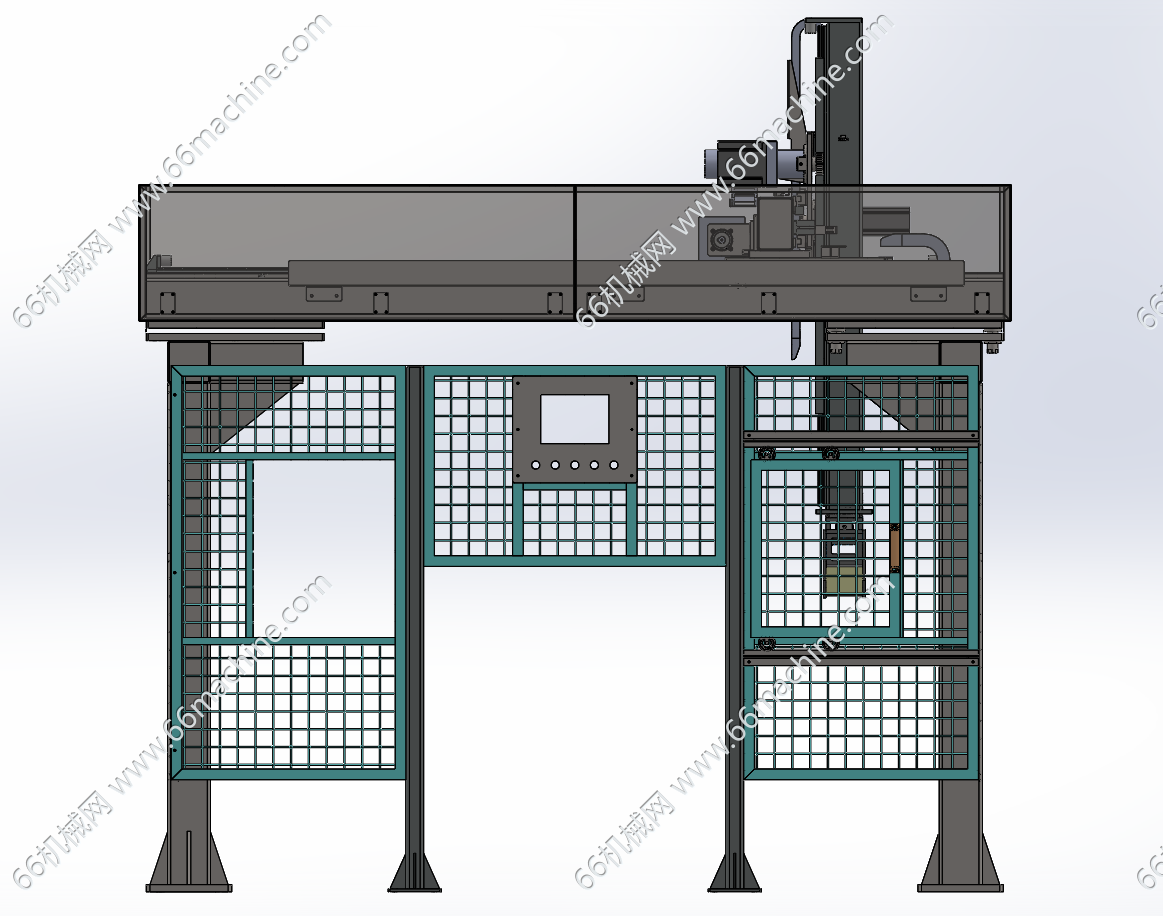
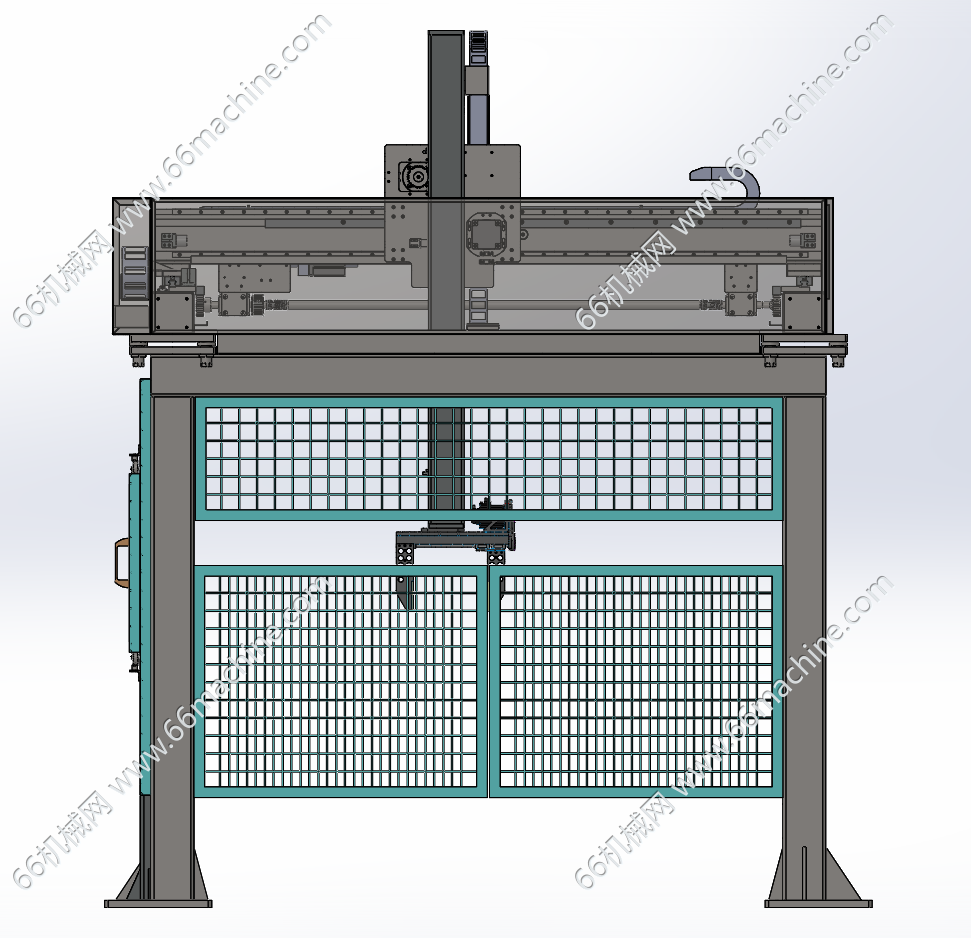
龙门桁架搬运机械手主视图.png
-
龙门桁架搬运机械手侧视图.png
-
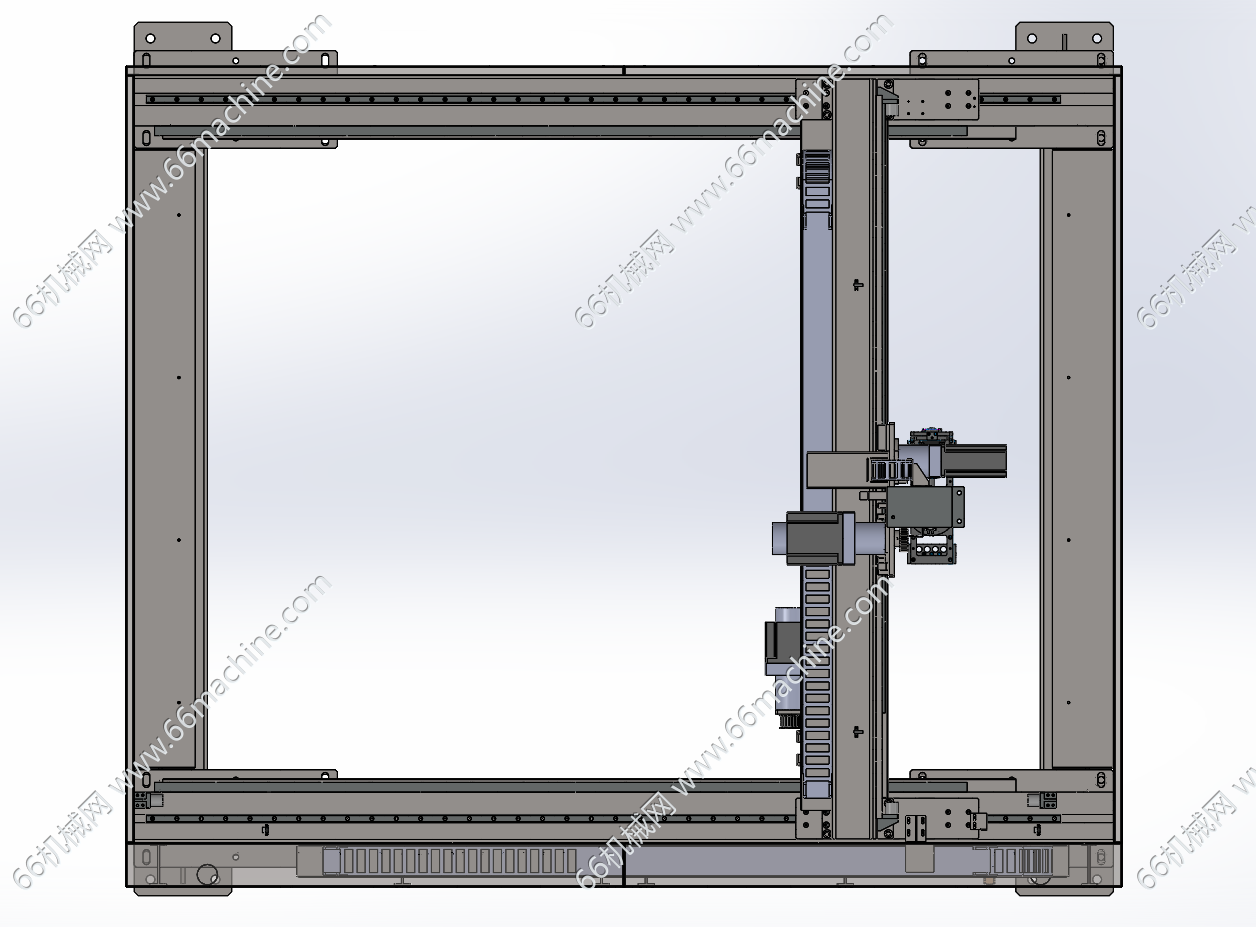
龙门桁架搬运机械手俯视图.png
图纸描述
本模型为龙门桁架搬运机械手,常简称为龙门机器人或直角坐标机器人,是一种以高刚性龙门式框架为主要支撑结构,在X(长轴)、Y(横梁)、Z(升降)三个直线方向上进行运动的机械手系统。其运动轨迹为空间直角坐标系,通常搭配一个可旋转的末端轴(U轴)用于调整工件姿态。
