可变形智能四足机器人
发布时间:2025-07-11
-
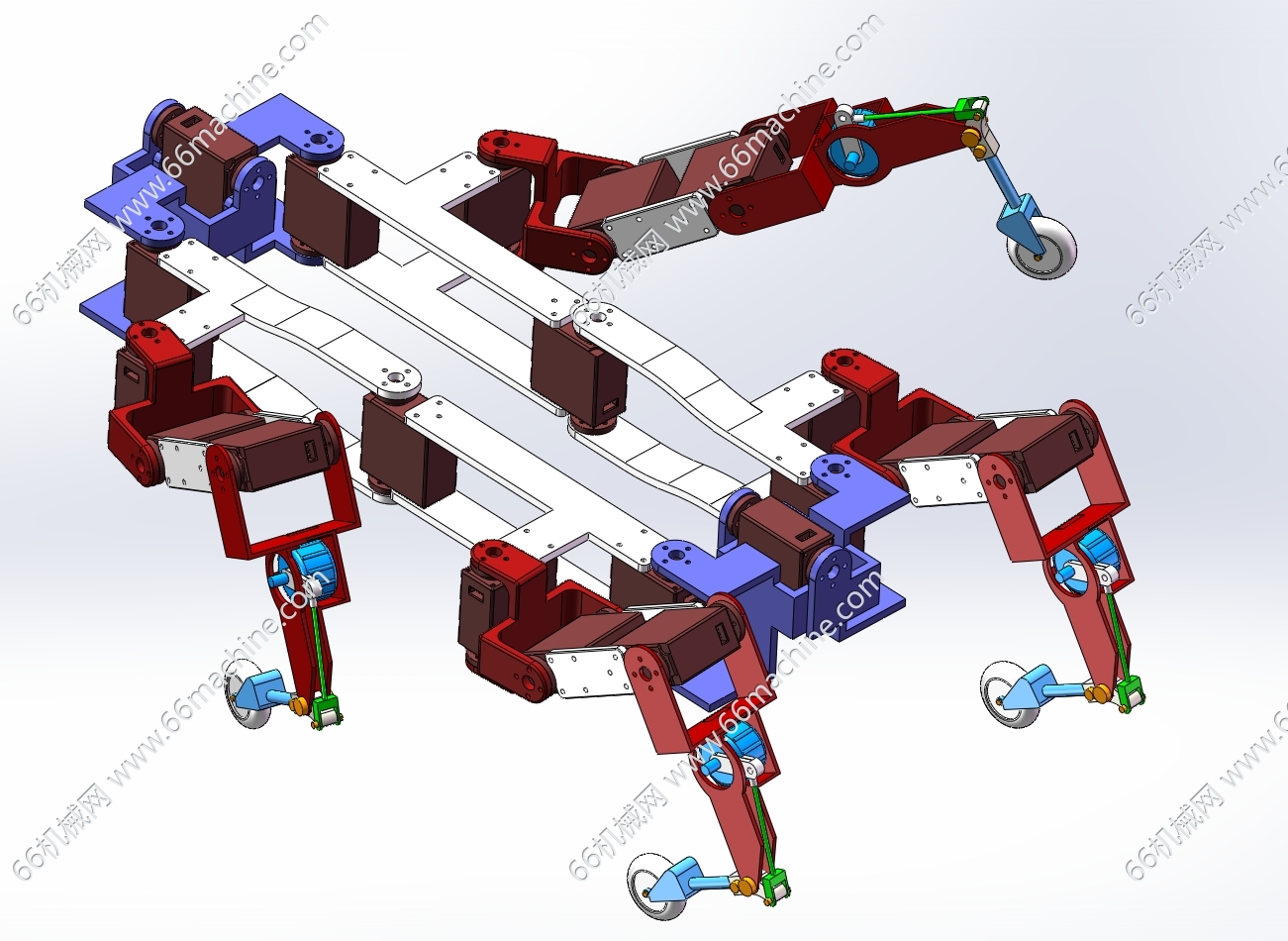
智能四足机器人轴测图(腿部位置可变换).png
-
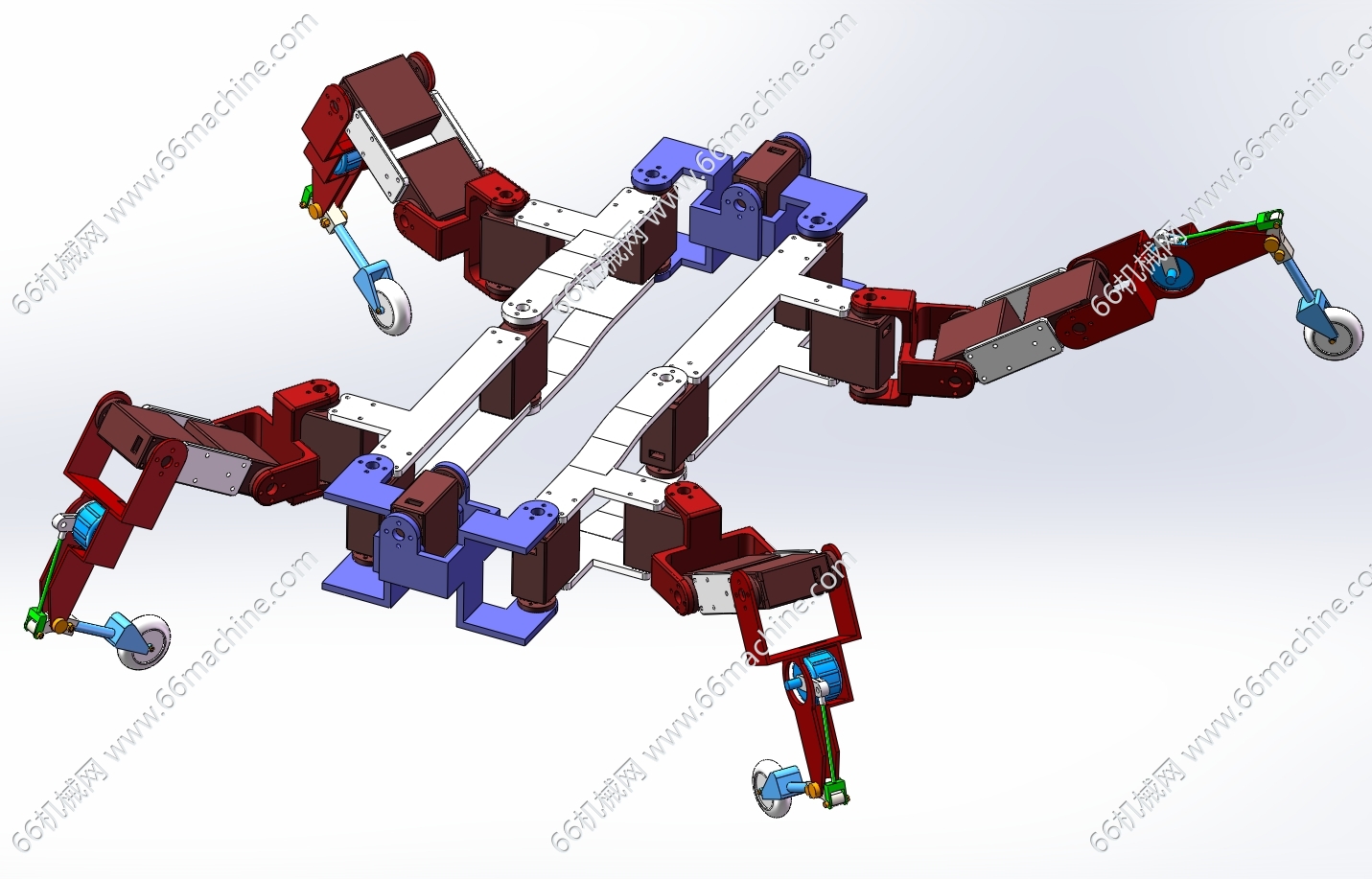
智能四足机器人.png
-
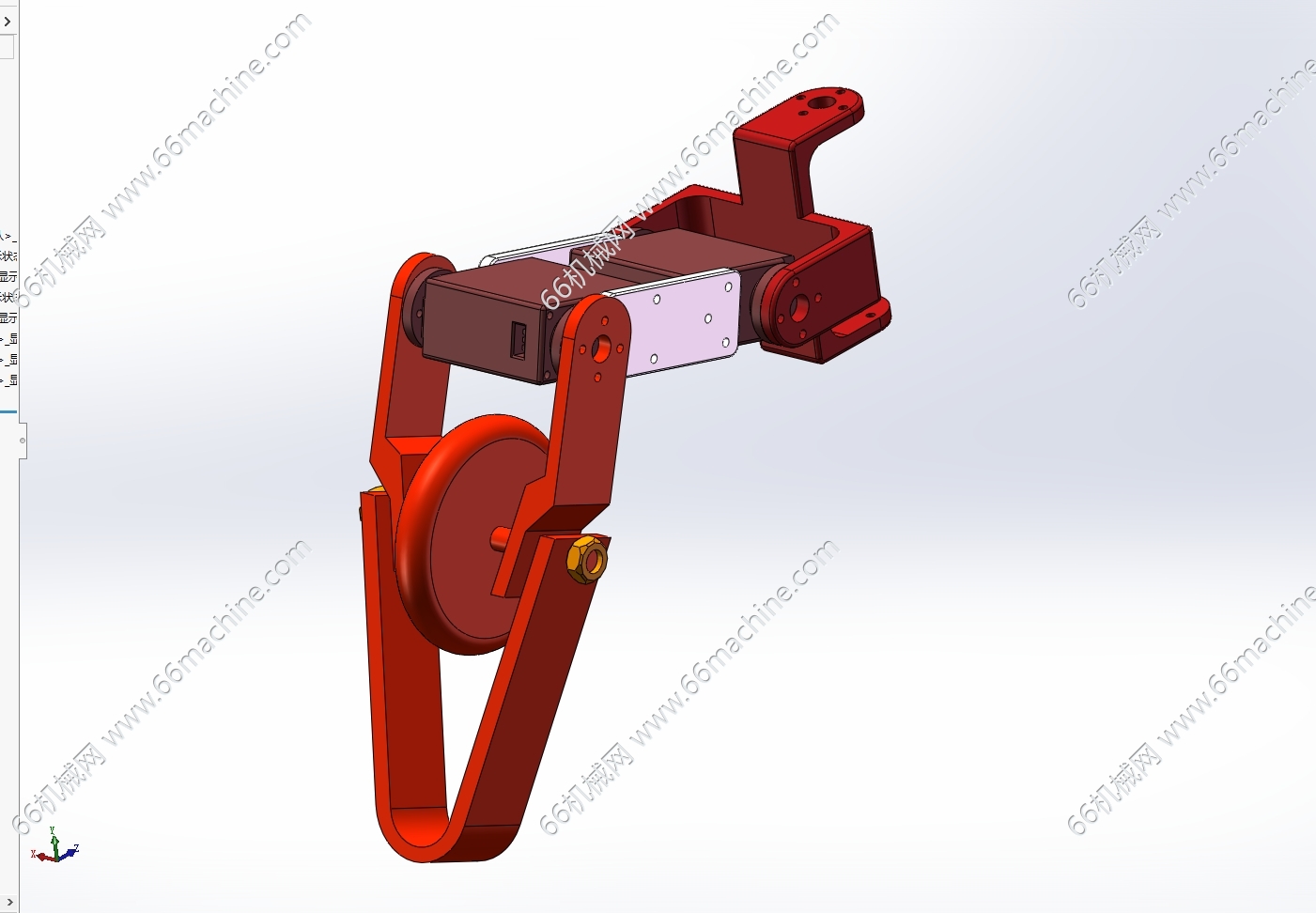
大腿部.png
-
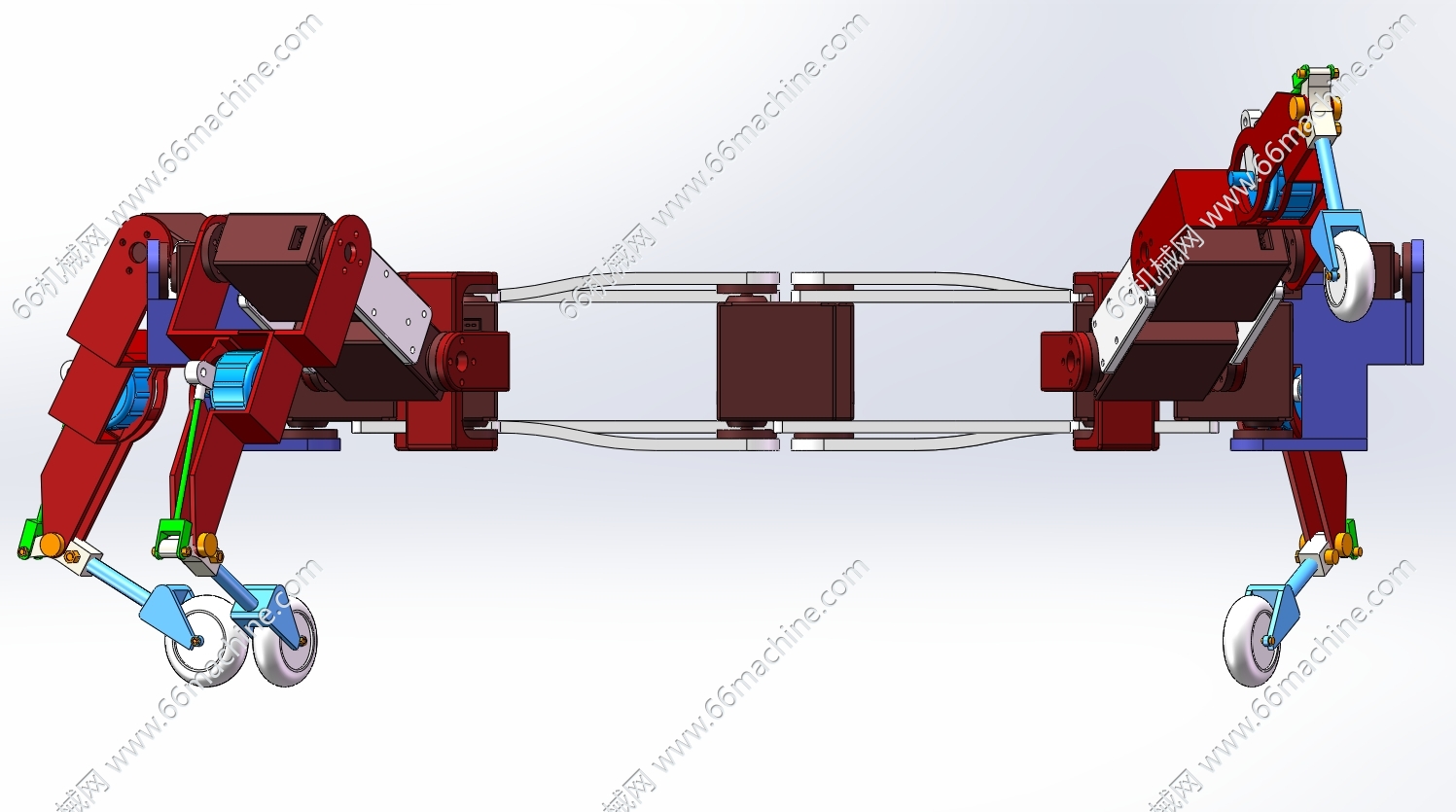
智能四足机器人主视图.png
-
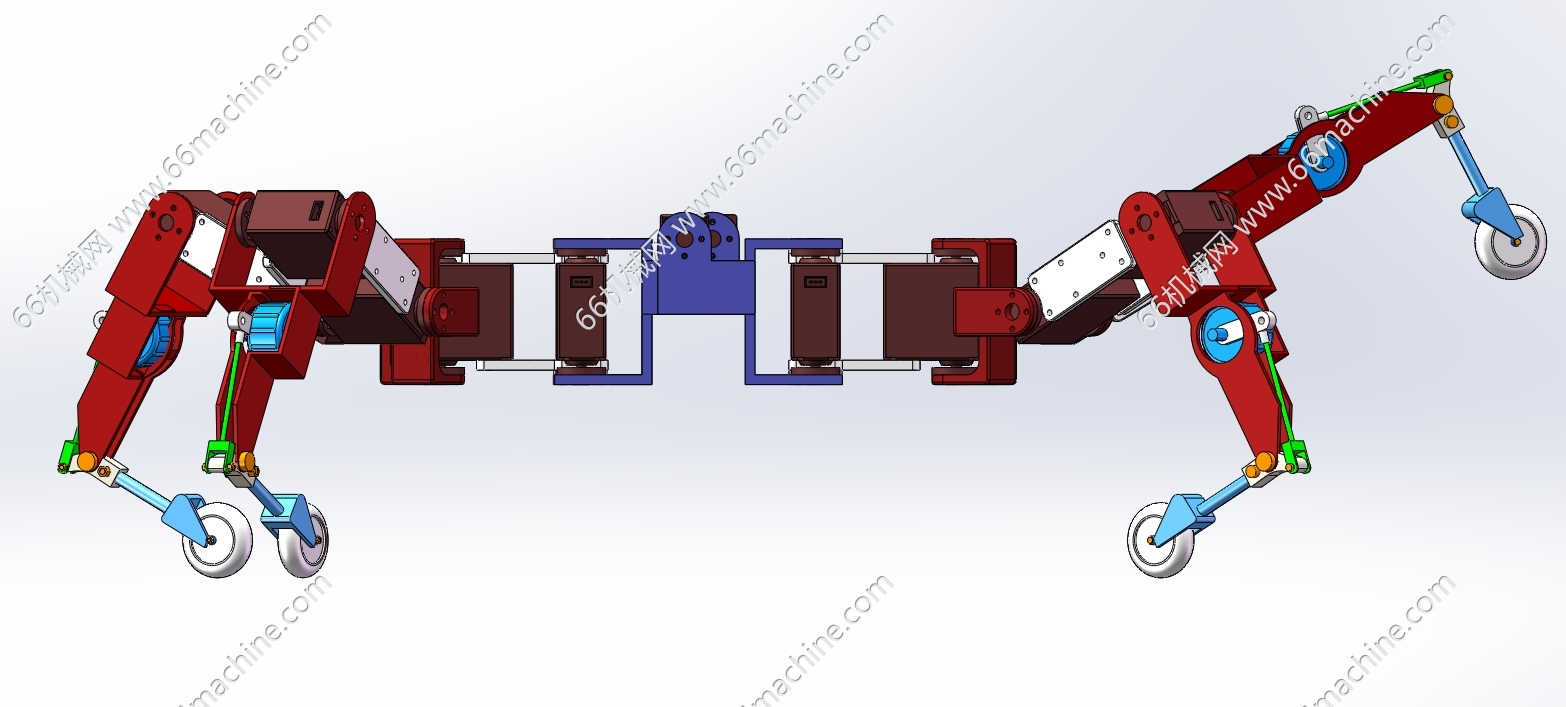
智能四足机器人侧视图.png
-
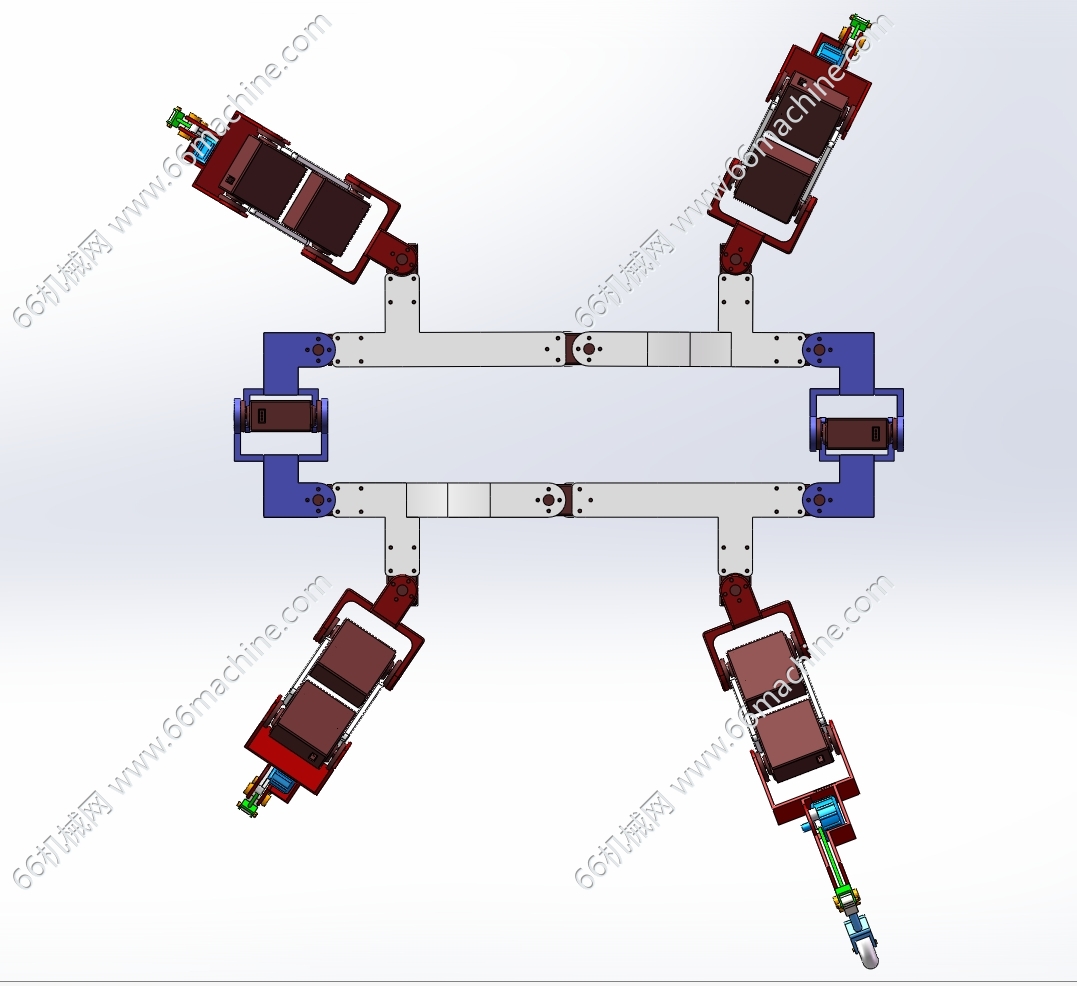
智能四足机器人俯视图.png
图纸描述
本模型为可变形智能四足机器人,能够根据任务需求自主改变构态,兼具高适应性与多功能性。其核心通过可重构关节、模块化连杆或锁合机构实现自由度动态调整,如从串联臂切换为并联机构。结合传感器与智能算法,可实时优化构型以适应复杂环境,如狭窄空间穿越、多模式抓取或地形移动。应用涵盖救援探测、太空维修、工业装配等领域,代表了机器人柔性化与自主化的发展趋势。
