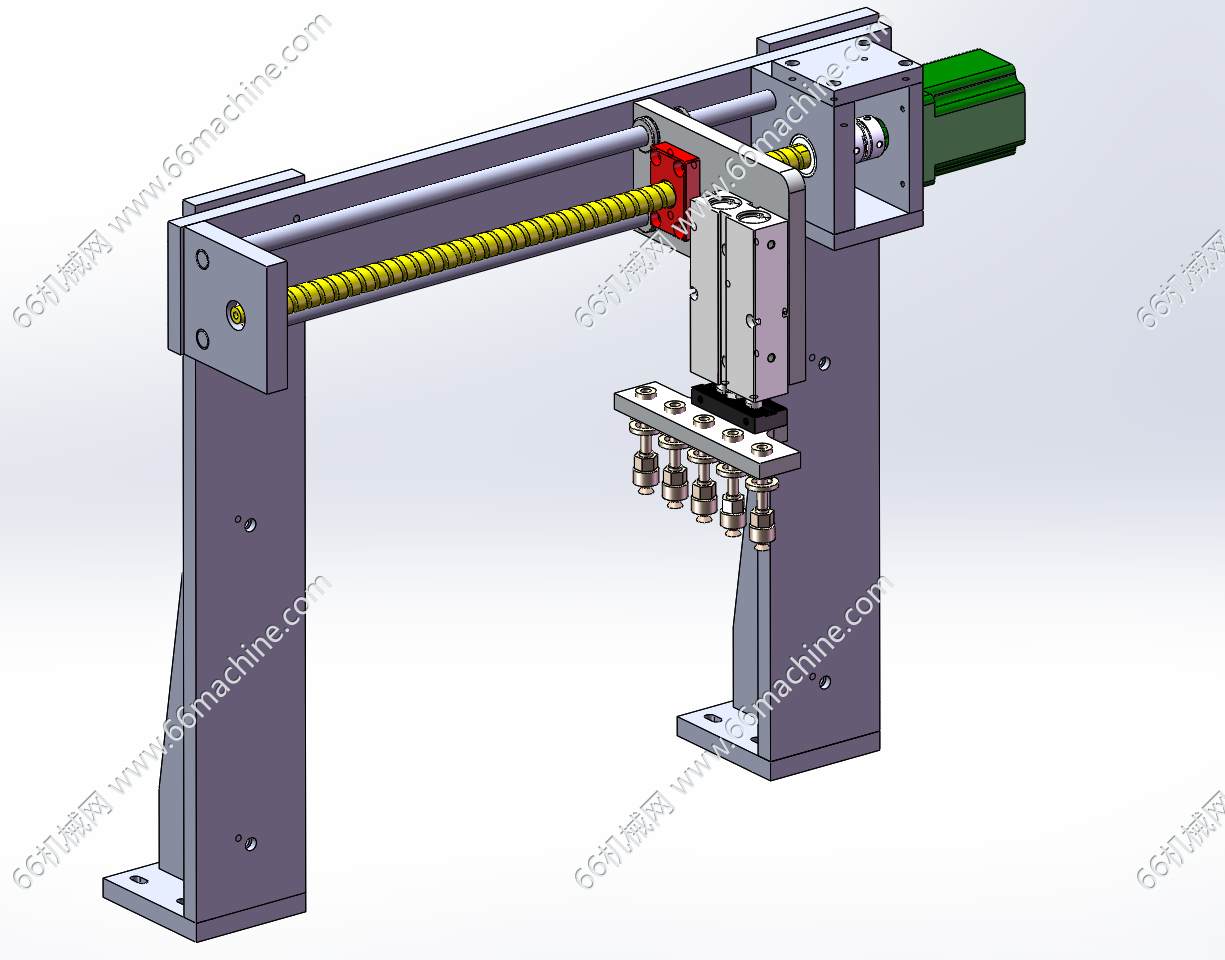
产品搬运机构.png
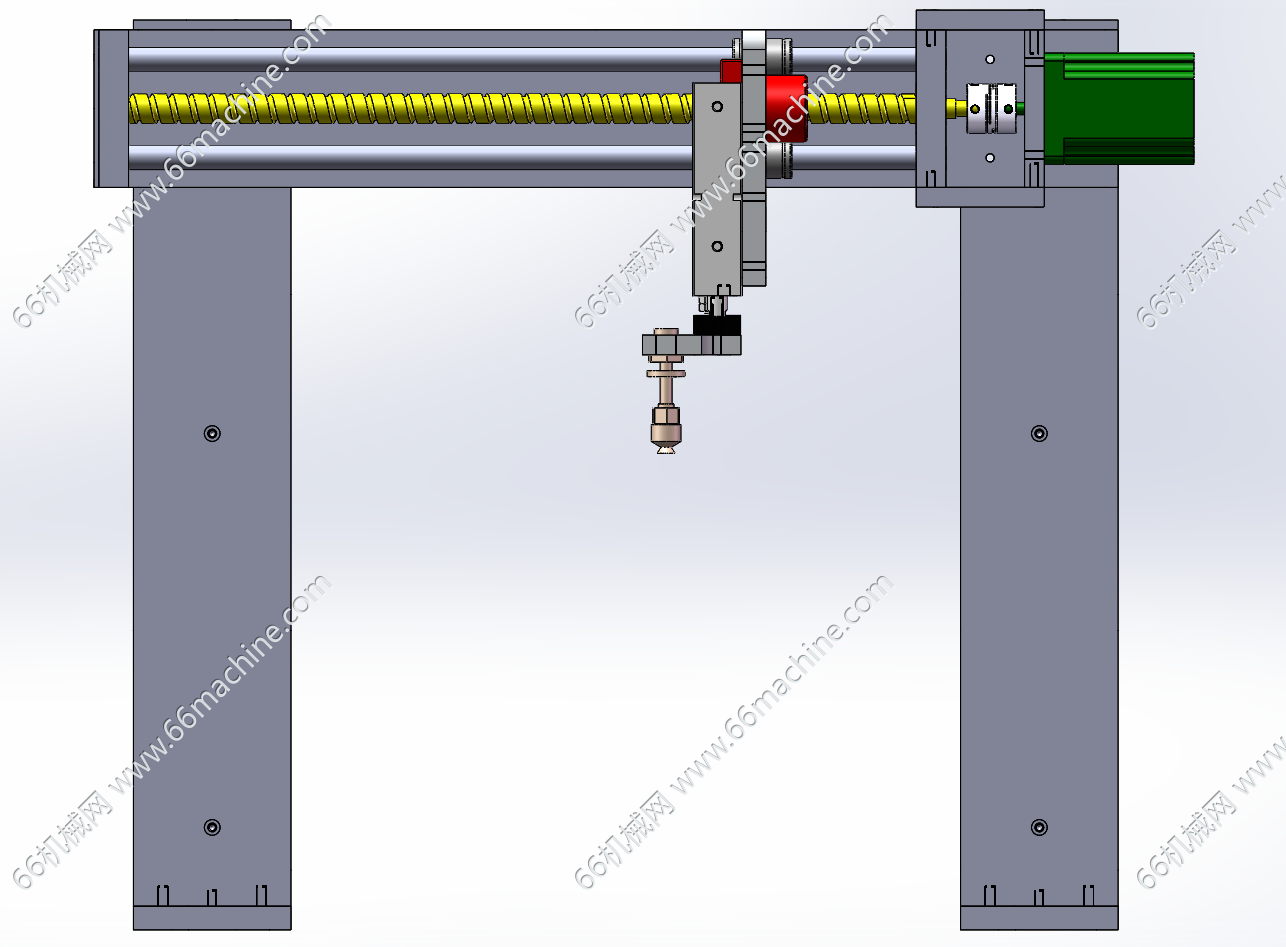
产品搬运机构主视图.png
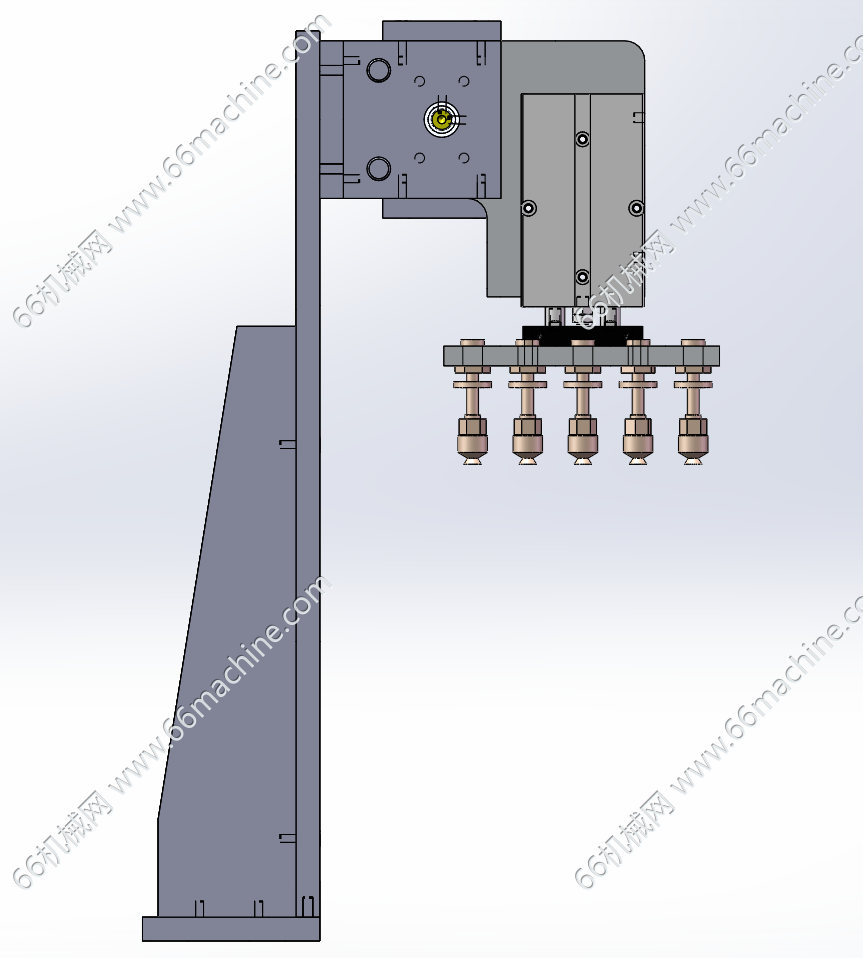
产品搬运机构侧视图.png
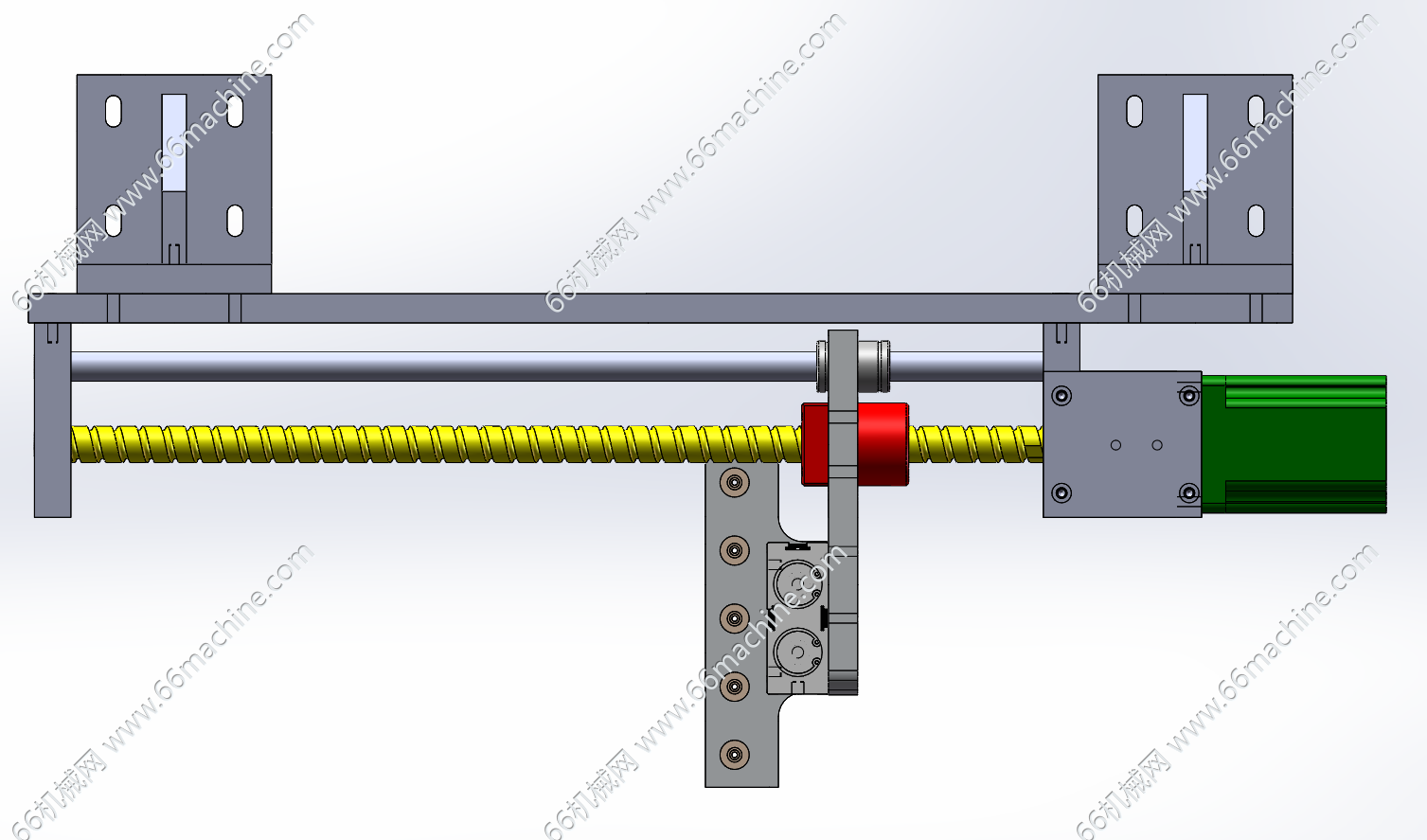
产品搬运机构俯视图.png
本模型为多吸嘴真空吸产品搬运机构(真空吸取机械手),通过伺服电机带动滚珠丝杠实现水平方向的高精度往复运动,配合双轴气缸驱动的真空吸盘排完成垂直升降与多物料同步吸附,整体结构刚性好、定位精度高,可高效完成轻小件物料的无损伤取放,广泛适用于电子、半导体等行业。
非标设计
图纸ID: 315092070400400922
图纸格式:SLDPRT、sldprt、SLDASM
图纸版本:Solidworks2021
文件大小:5.04MB
所需积分:15机械币
可否编辑: 可进行编辑,包含特征参数
关注人数:0人