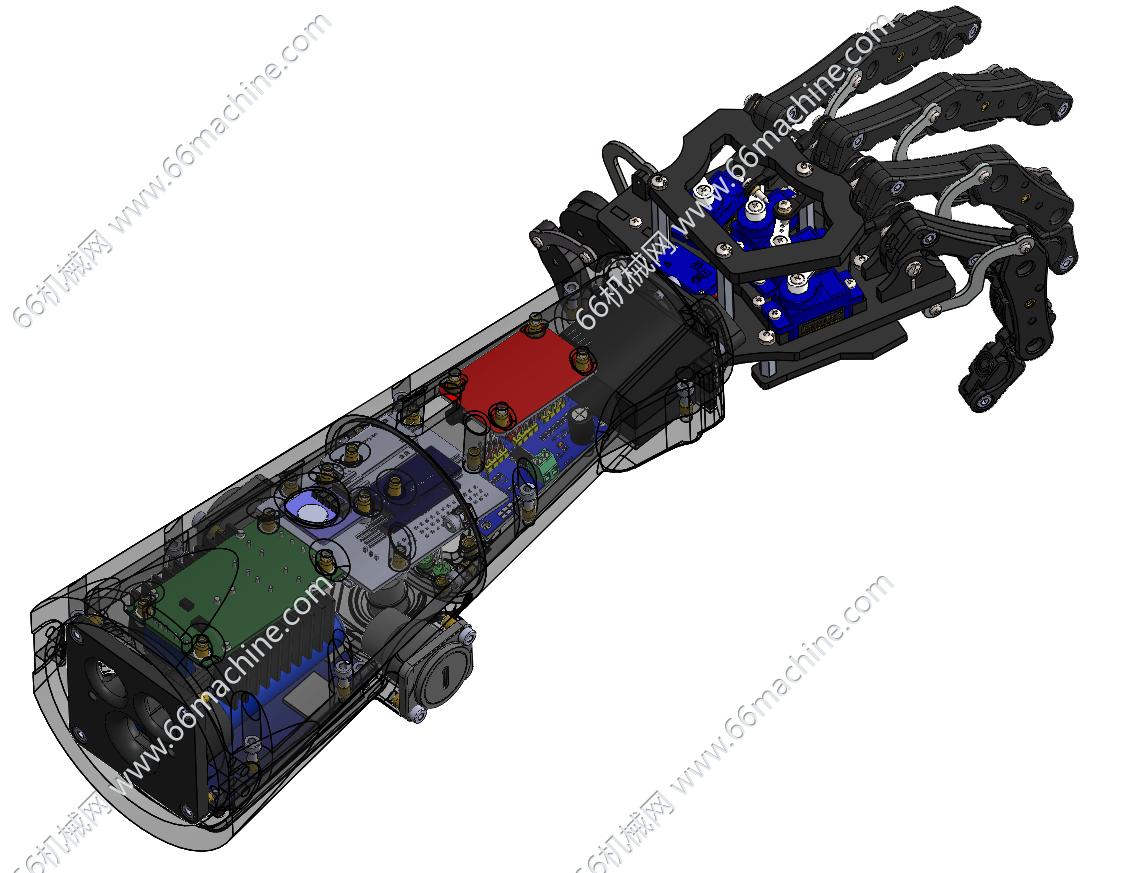
五指仿生机械手.png
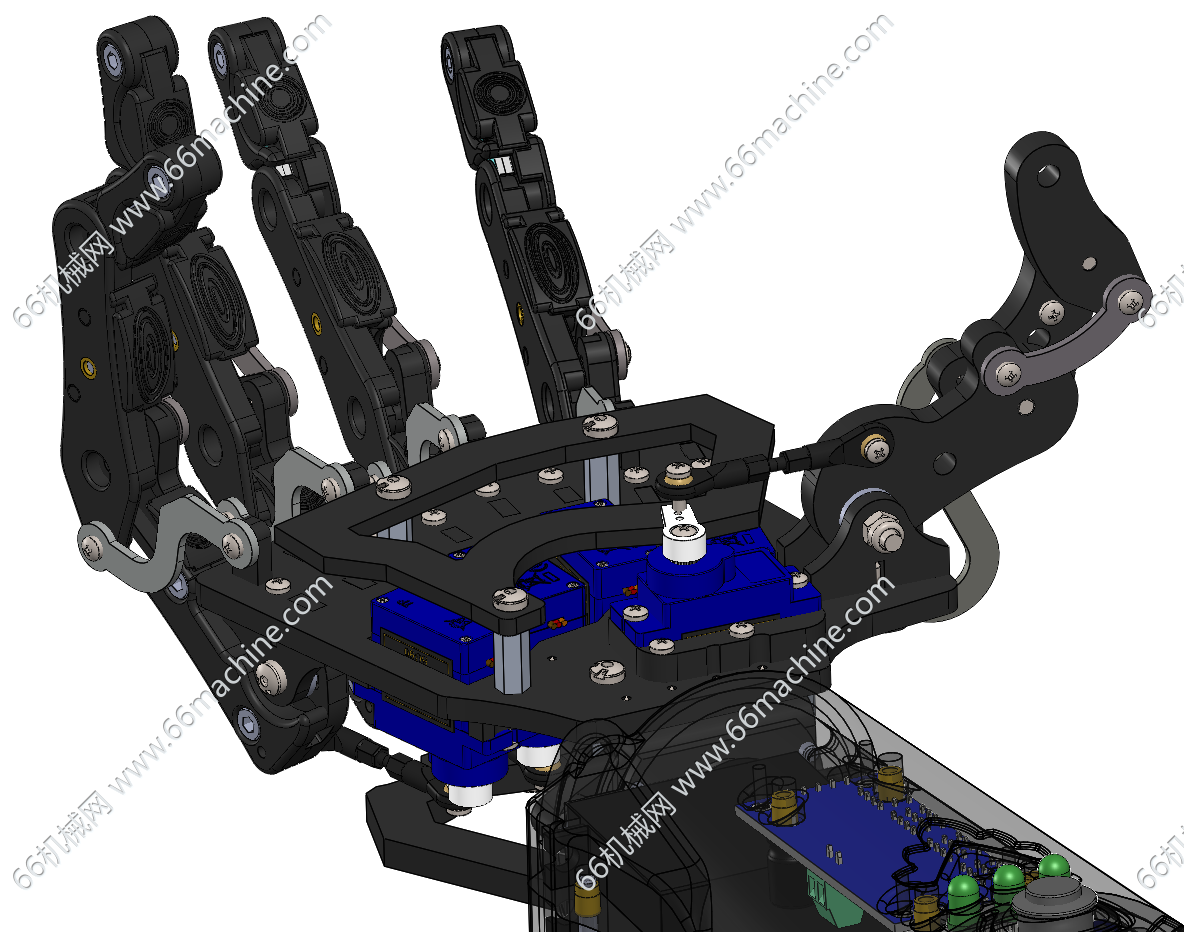
五指细节.png
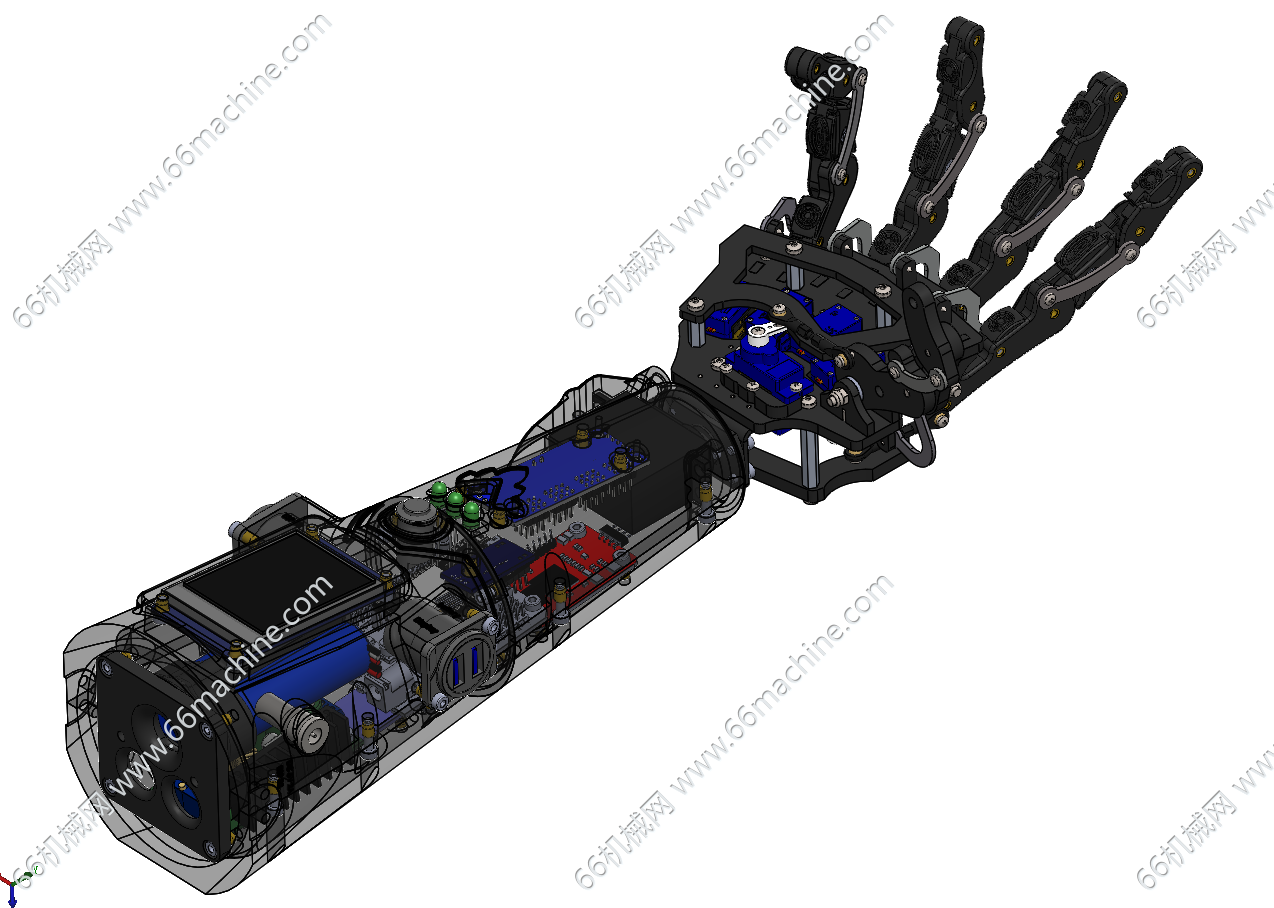
五指仿生机械手轴测图.png
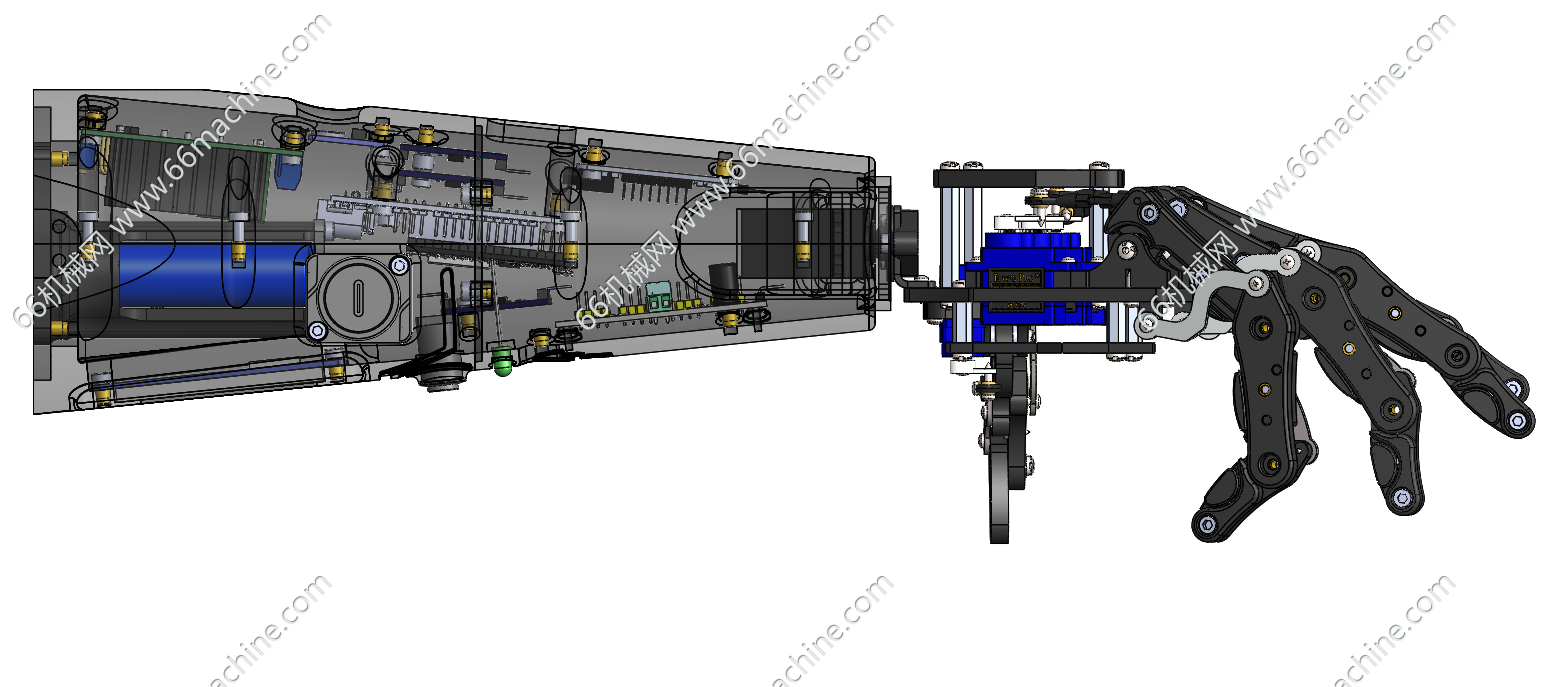
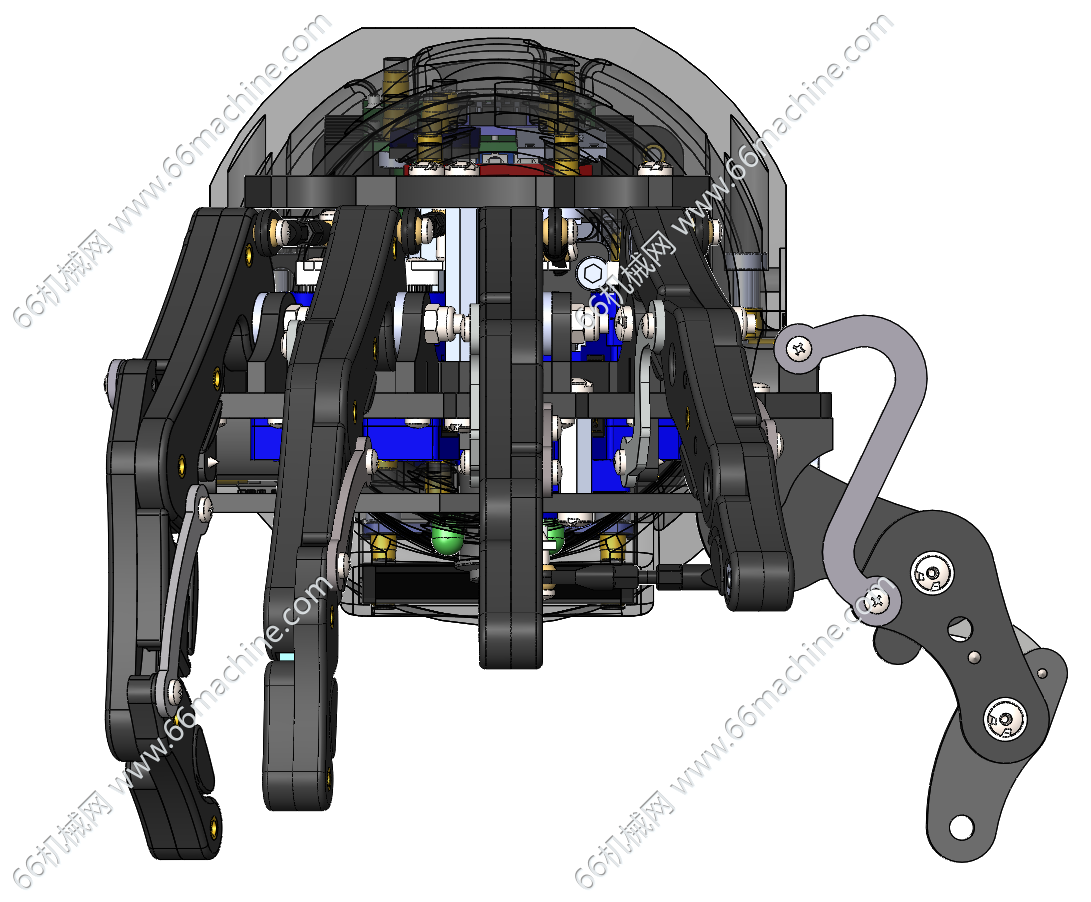
五指仿生机械手主视图.png
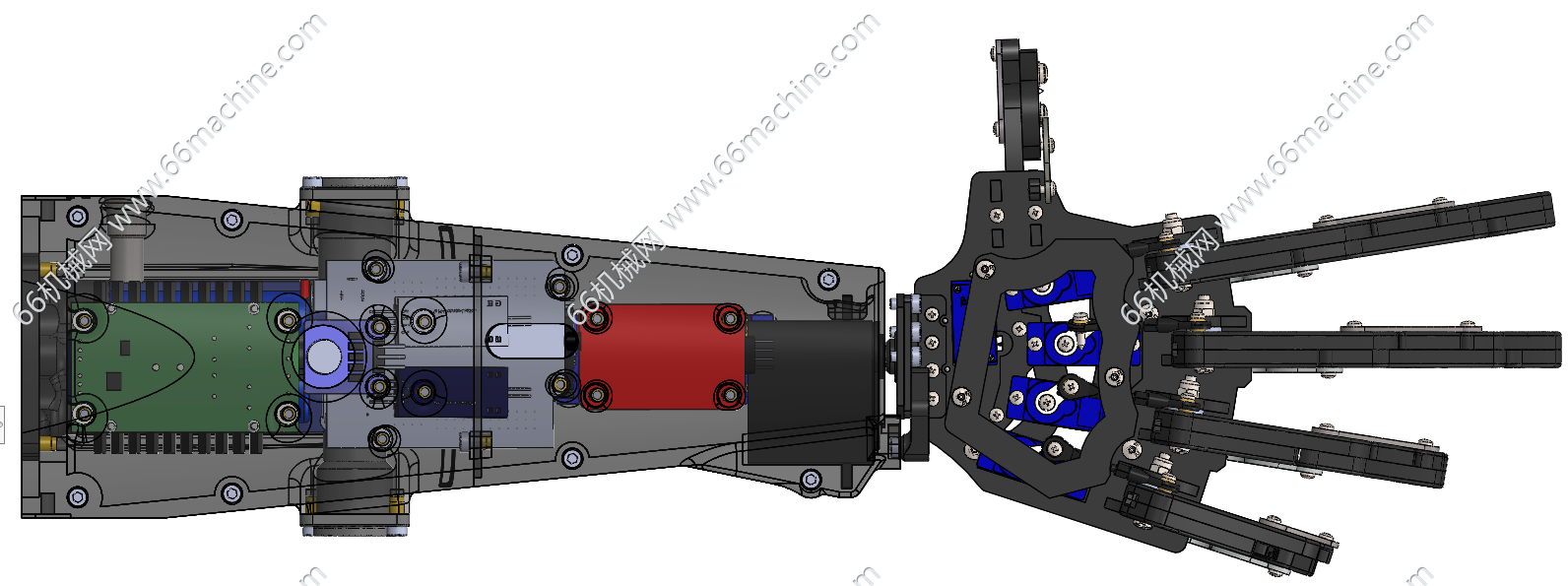
五指仿生机械手俯视图.png
五指仿生机械手侧视图.png
本模型为五指仿生机械手,采用多自由度连杆与肌腱驱动设计,模仿人类手部骨骼和肌肉运动,可实现精细抓握和复杂手势,用于机器人学、仿生学和控制算法的研究与教学。
机械打工人
图纸ID: 315092070400400599
图纸格式:SLDPRT、SLDASM
图纸版本:Solidworks2023
文件大小:115.20MB
所需积分:35机械币
可否编辑: 可进行编辑,包含特征参数
关注人数:0人