四连爪搬送机构(四工位夹取移栽机构)
发布时间:2025-12-10
-
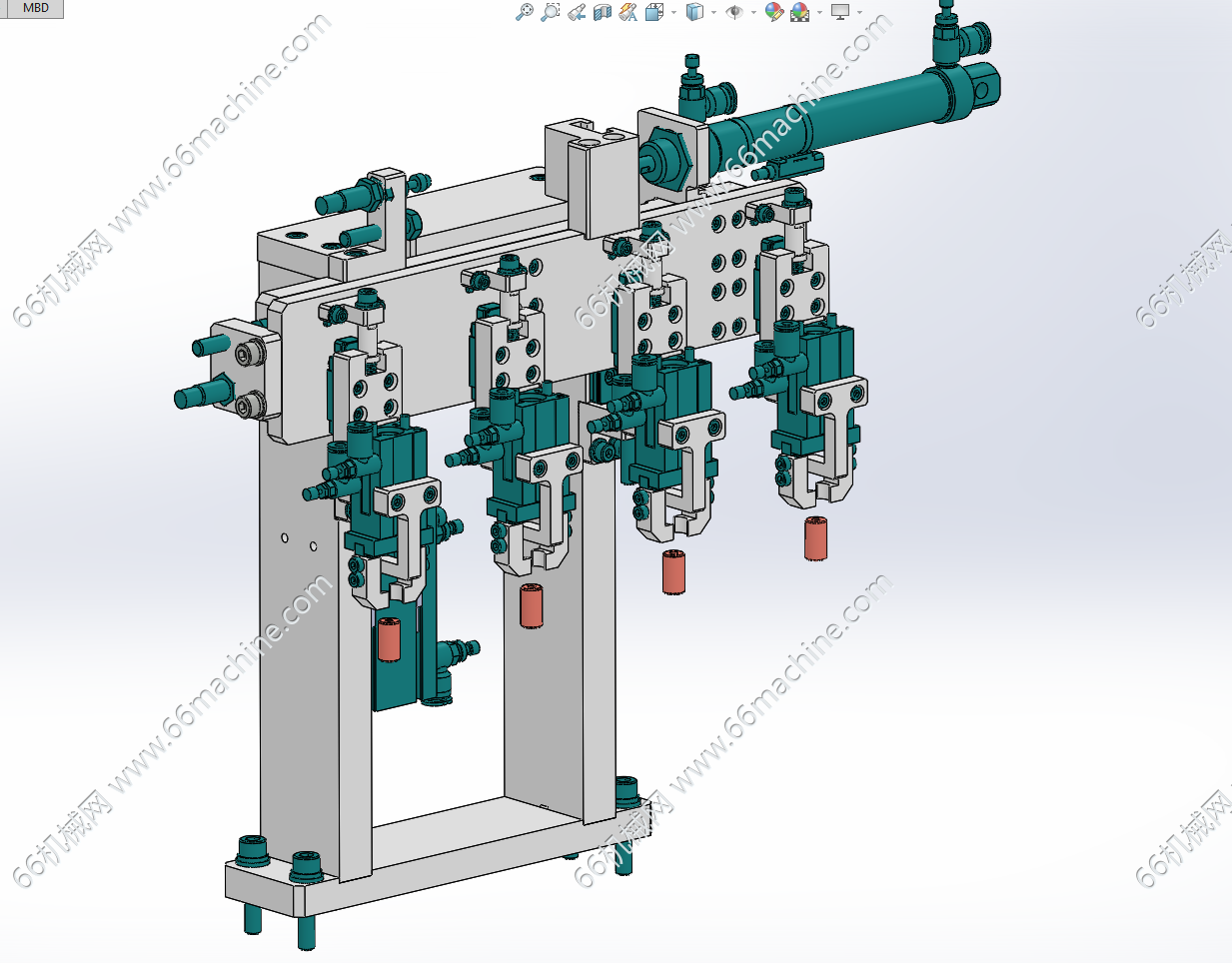
四连爪搬送机构.png
-
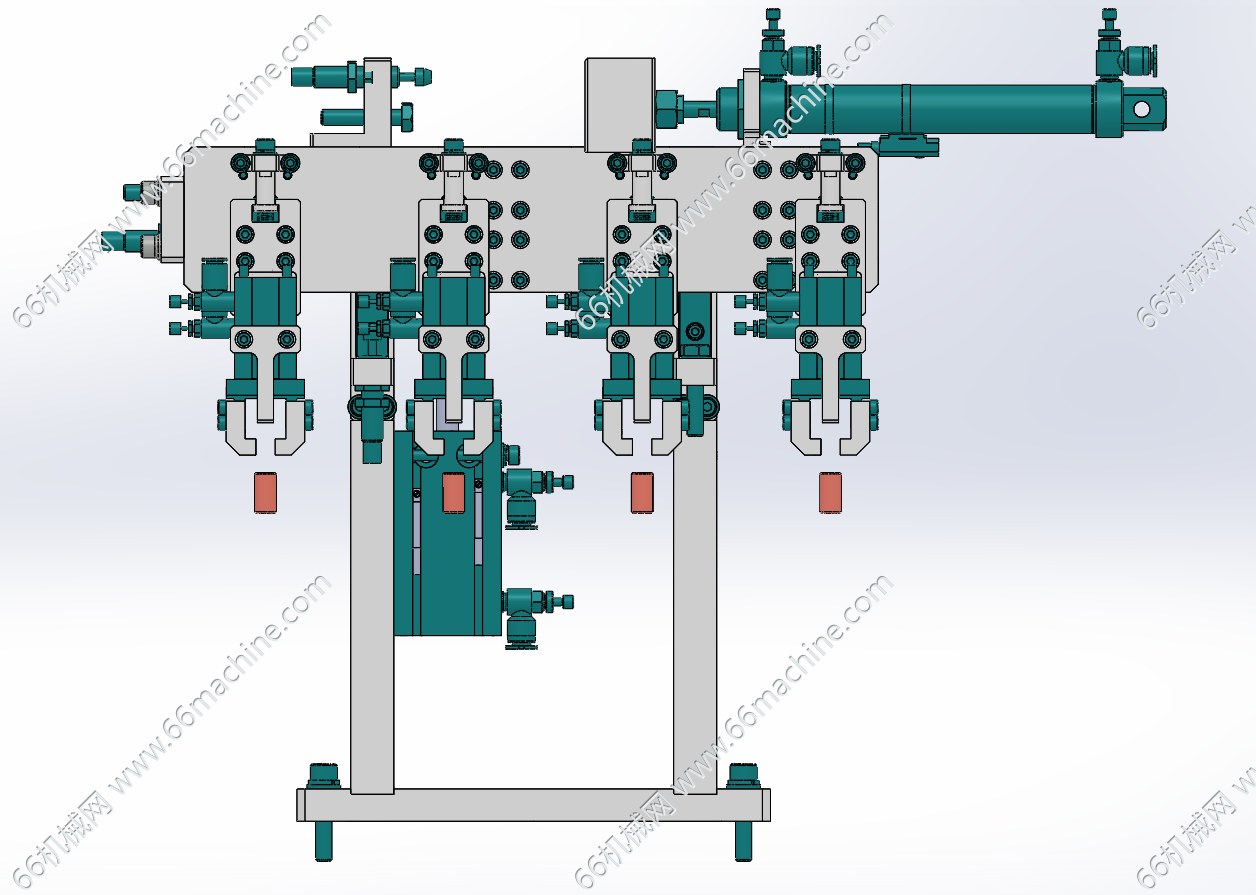
四连爪搬送机构主视图.png
-
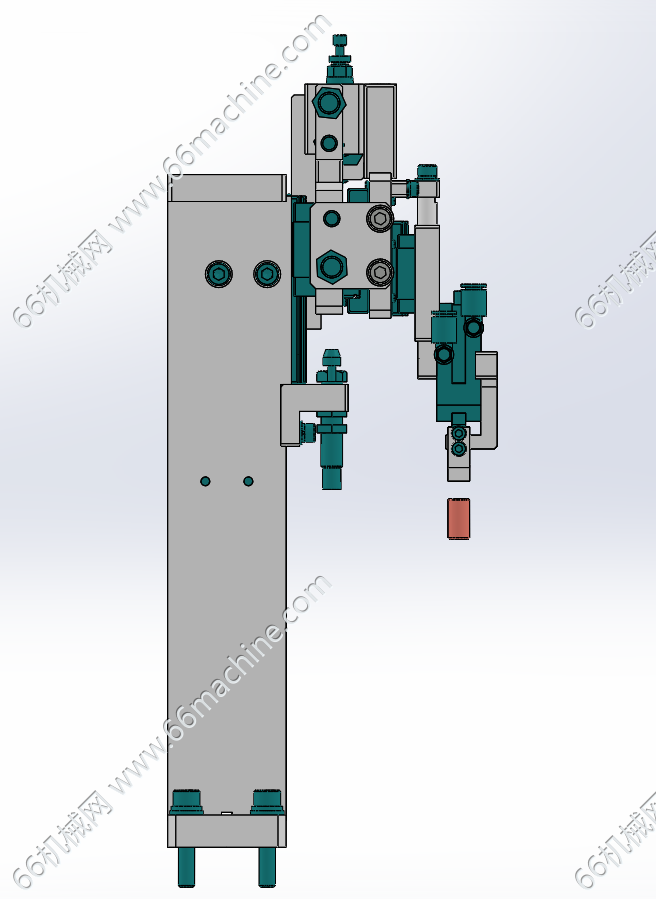
四连爪搬送机构侧视图.png
-
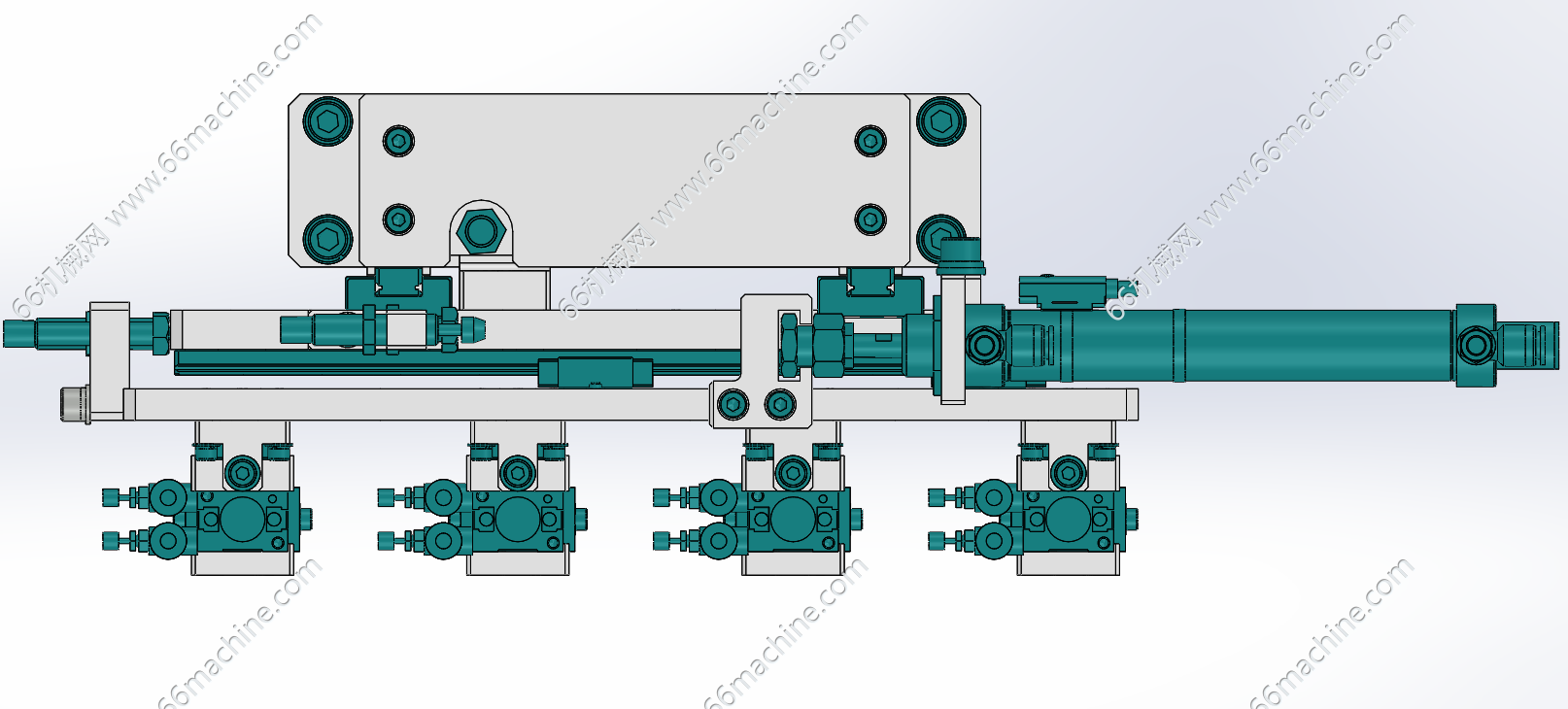
四连爪搬送机构俯视图.png
图纸描述
四连爪搬送机构(四工位夹取移栽机构)是一种集成式、多工位同步搬运的机械装置。其核心特点是一个驱动源通过特定的传动结构(如拨叉、凸轮、连杆或齿轮齿条)同时驱动四个抓取爪(手爪),使它们在一个工作循环内,同步完成“抓取-提升-平移-下降-释放-返回”等一系列动作,从而实现将工件从一个位置精确搬运到另一个或多个位置。
