履带式采摘机器人-sw2024版本,另含x-t通用格式
发布时间:2025-06-27
-
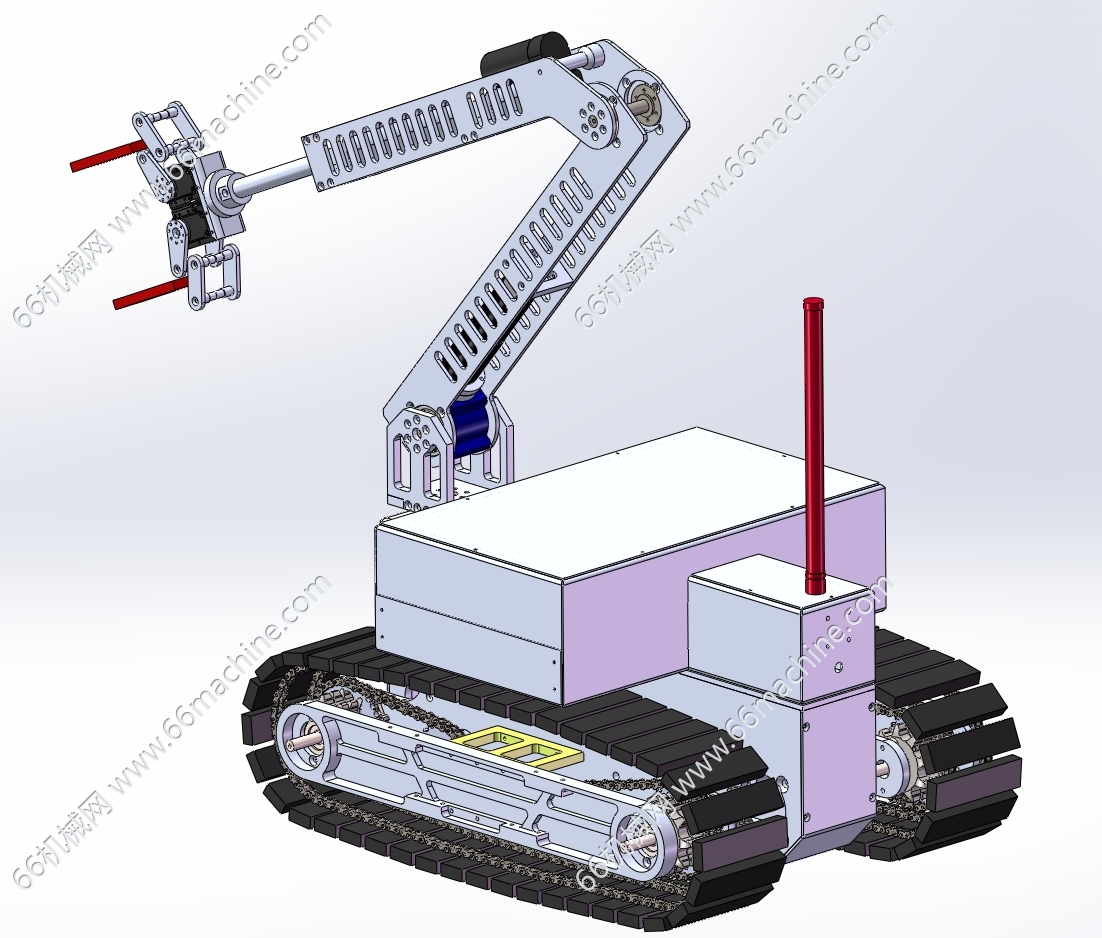
履带式采摘机器人.png
-
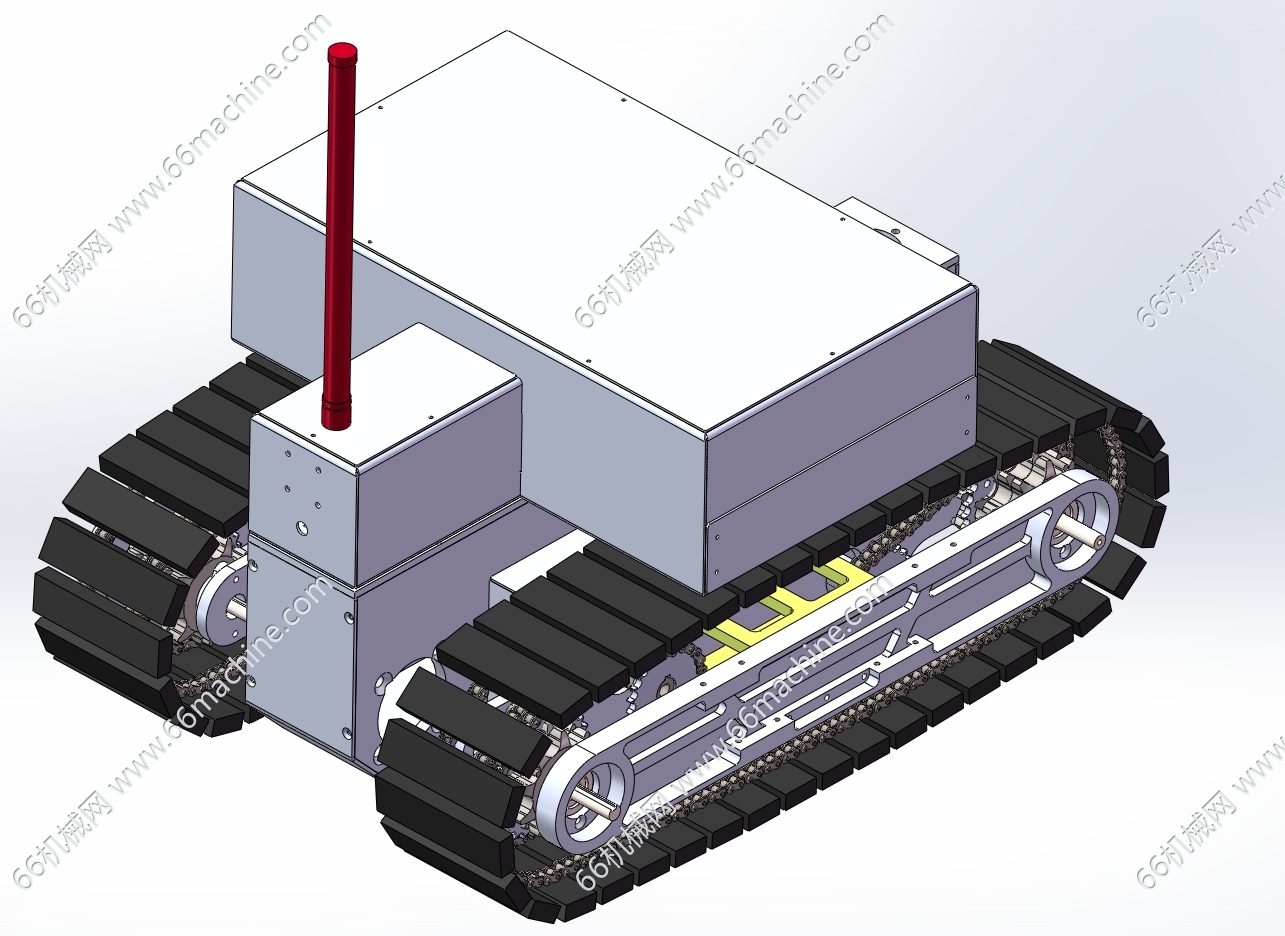
履带底盘.png
-
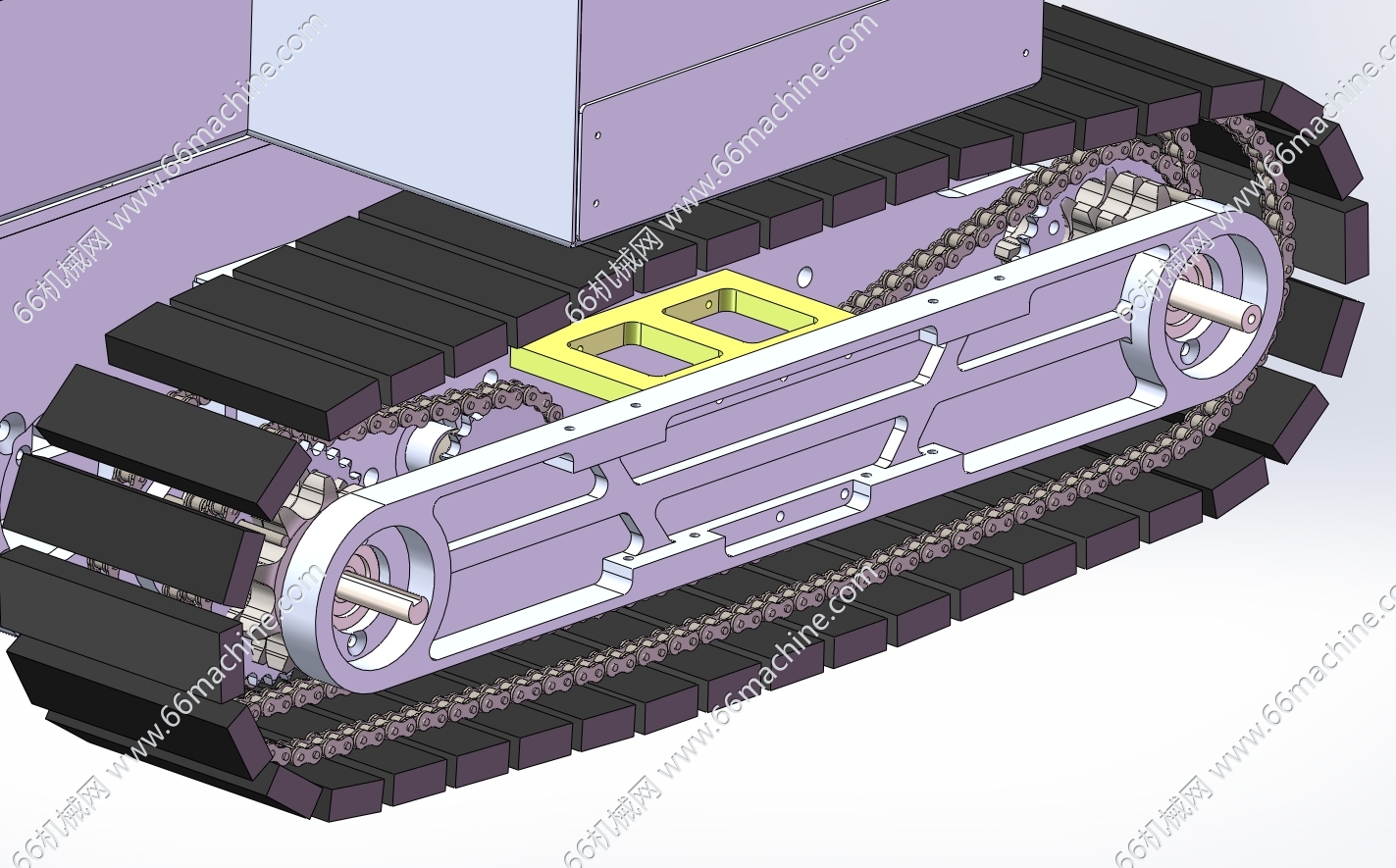
履带.png
-
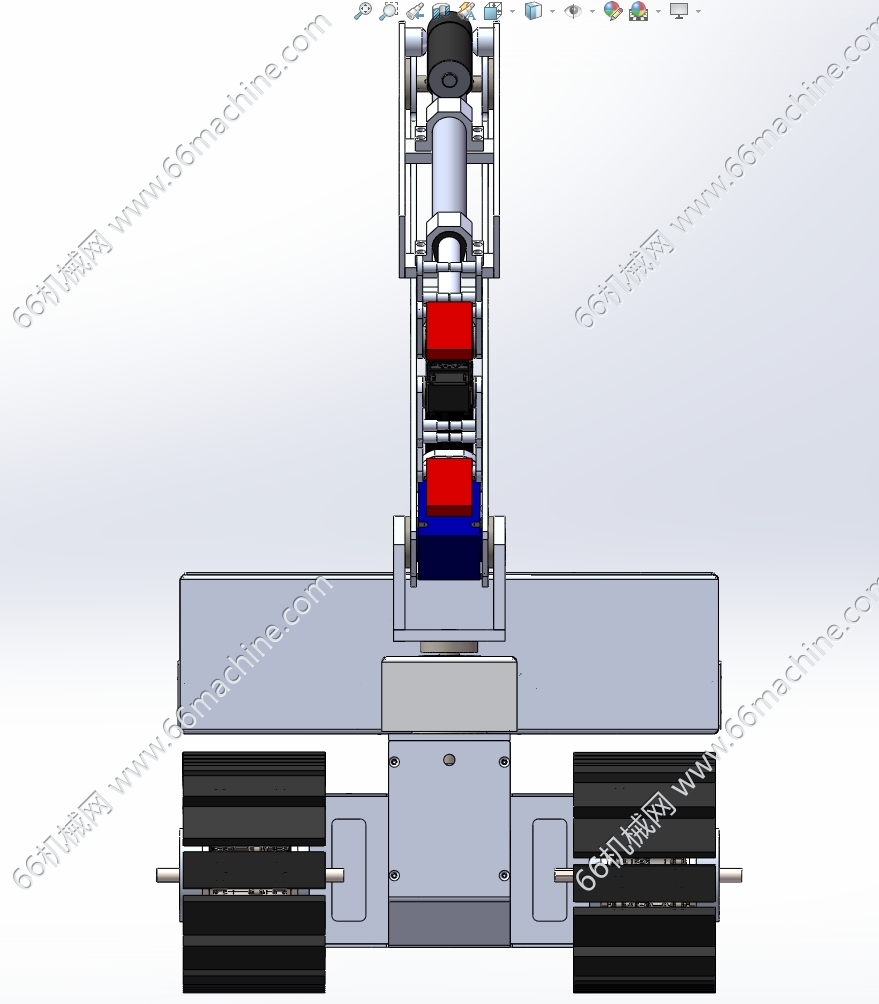
履带式采摘机器人主视图.png
-
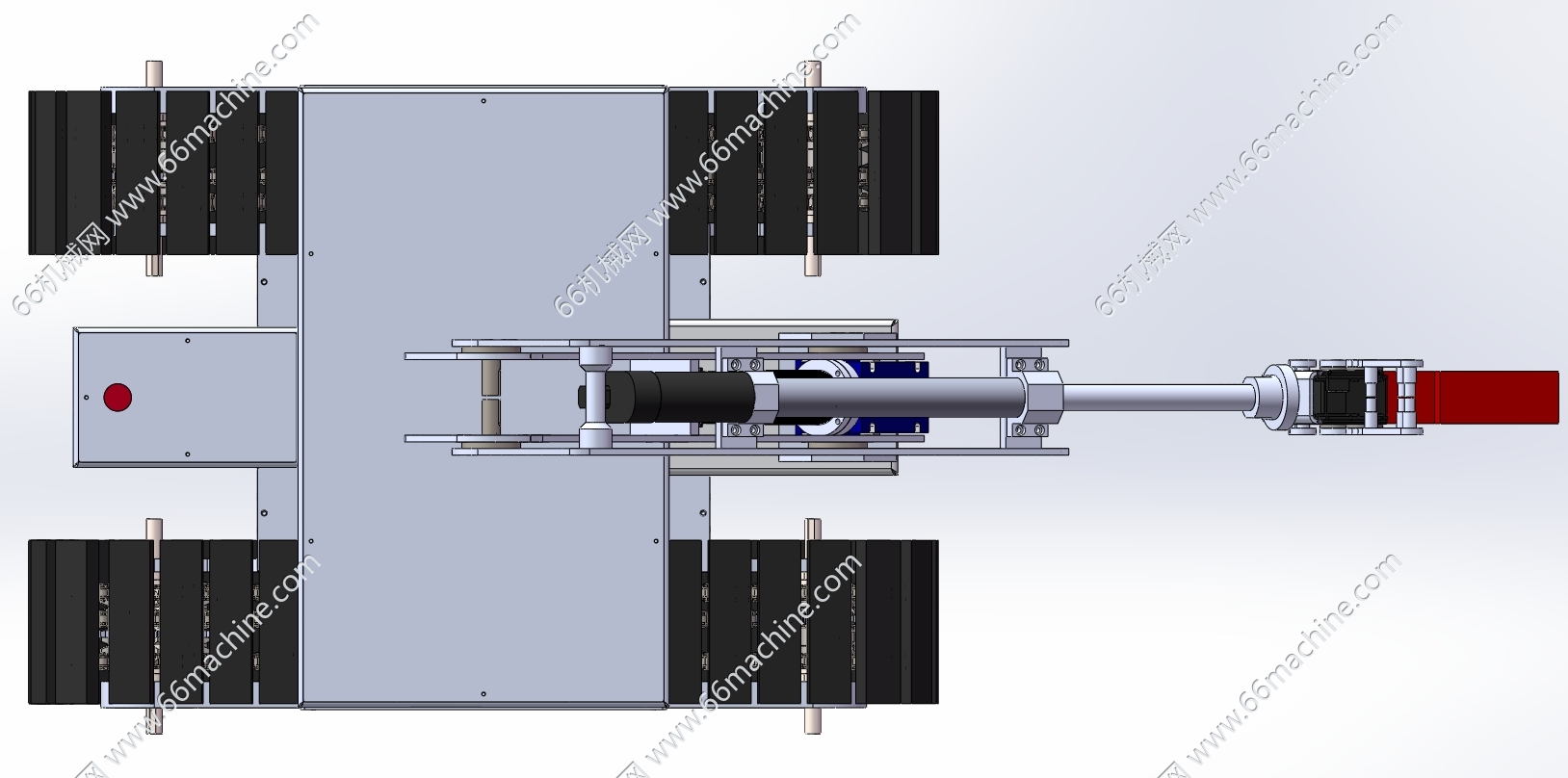
履带式采摘机器人俯视图.png
-
源文件.png
图纸描述
本模型为履带式采摘机器人,采用履带车搭载多轴机械手,通过高精度摄像头识别果实成熟度(如颜色、形状),配合多轴机械臂及柔性末端执行器实现无损采摘。采用自主导航系统(RTK-GPS或激光雷达)在果园中移动,工作速度达5-10秒/果,支持苹果、番茄等作物,夜间可作业。集成物联网模块实时上传数据,降低人工成本70%以上,是智慧农业的关键技术装备。sw2024版本,另含x-t通用格式,可供大家参考!
