基于多连杆的仿人形双足机器人(步行机器人)
发布时间:2026-05-06
-
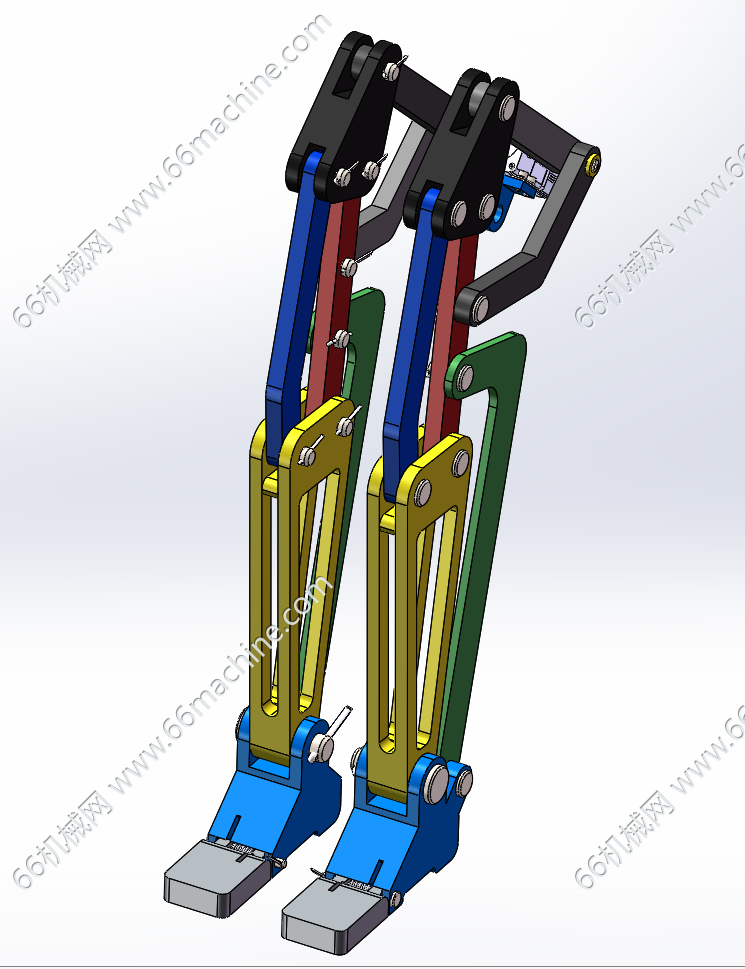
基于多连杆的仿人形双足机器人.png
-
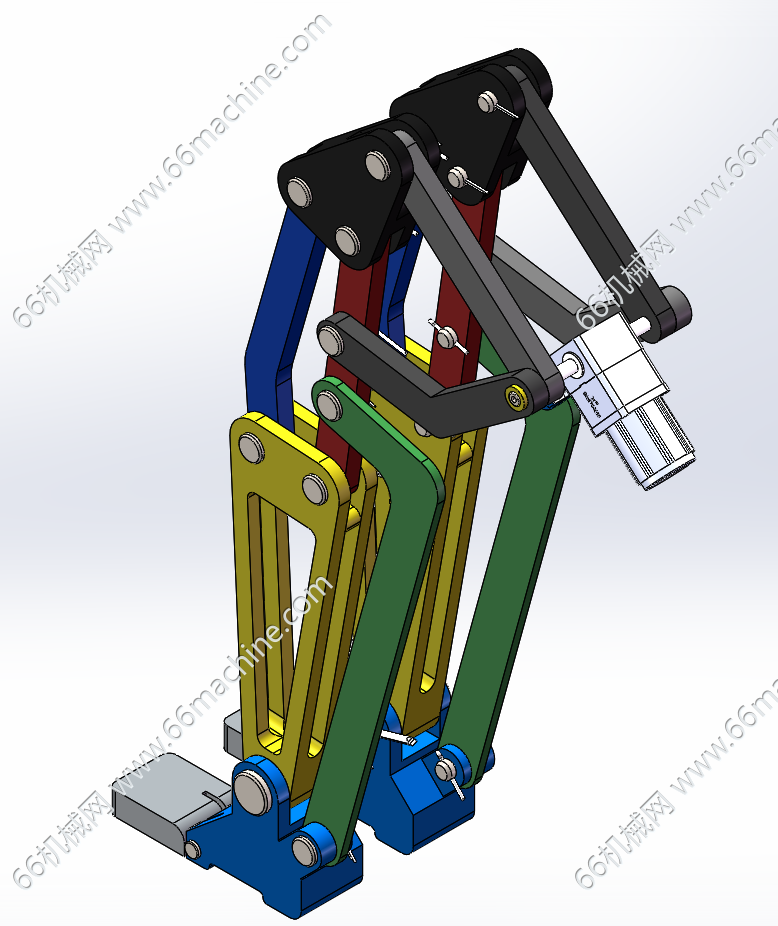
基于多连杆的仿人形双足机器人轴测图.png
-
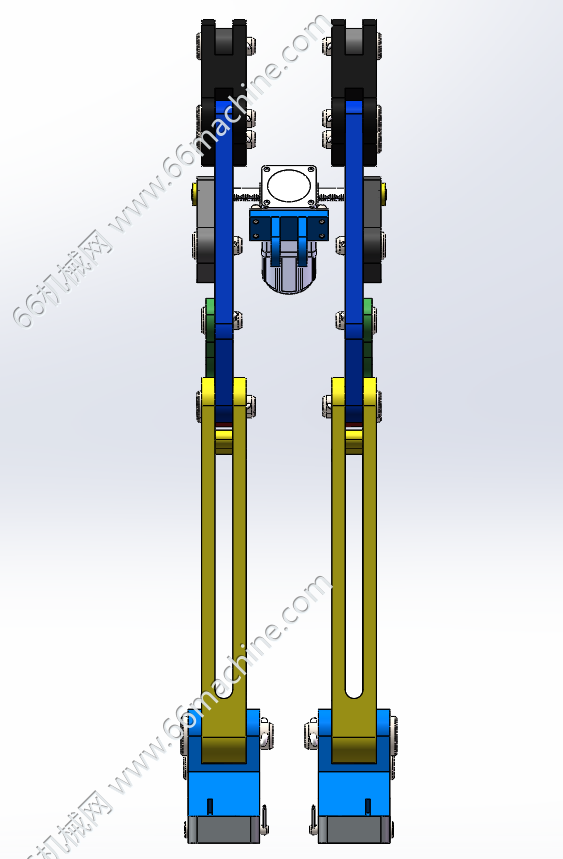
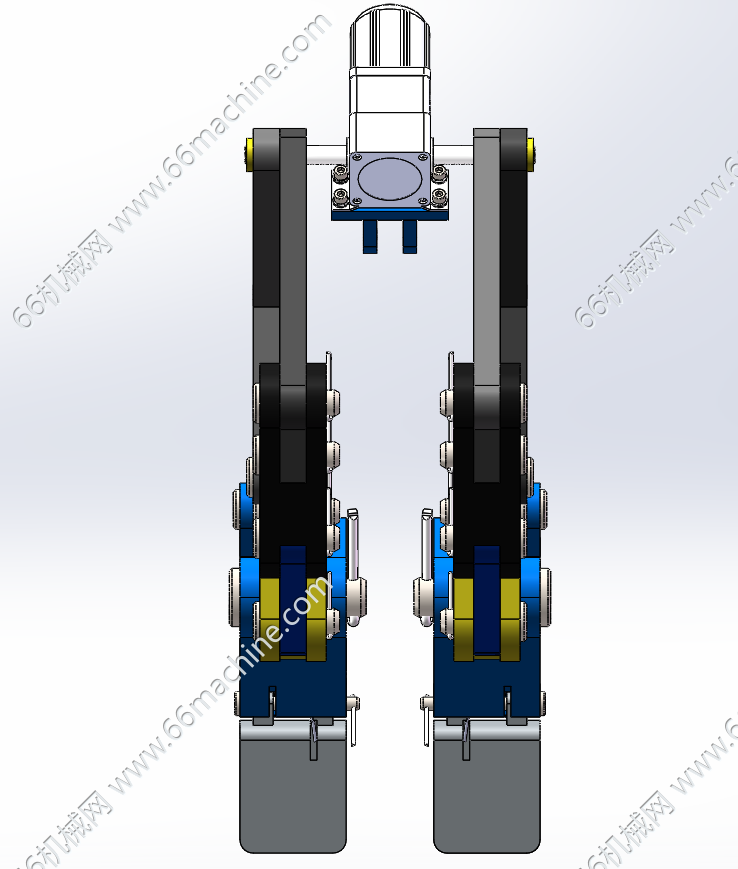
基于多连杆的仿人形双足机器人主视图.png
-
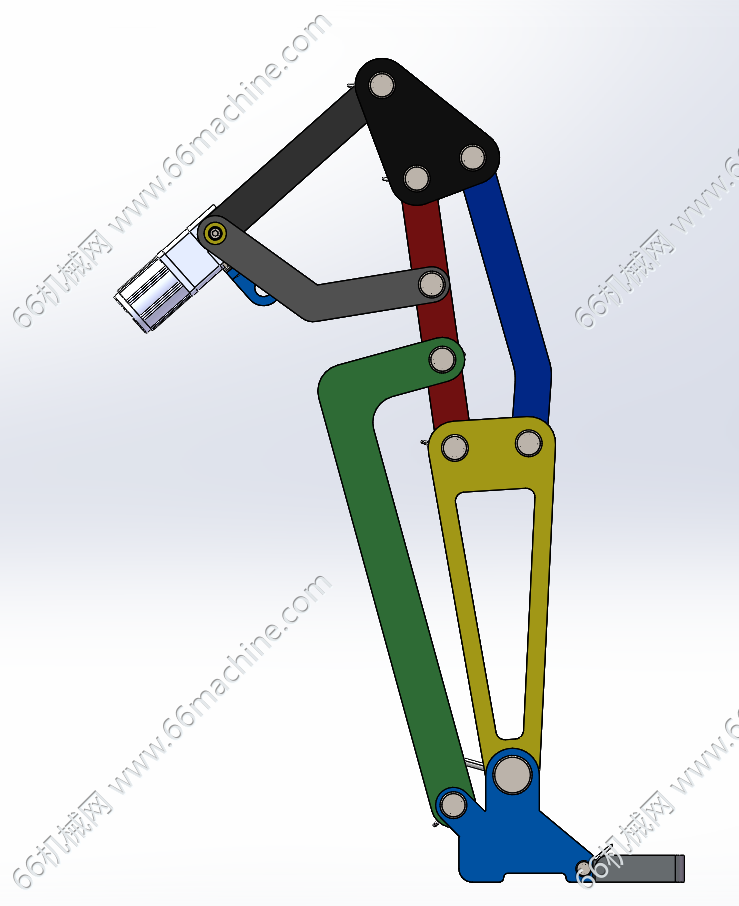
基于多连杆的仿人形双足机器人侧视图.png
-
基于多连杆的仿人形双足机器人俯视图.png
图纸描述
本模型为基于多连杆的仿人形双足机器人(步行机器人),以对称式仿生构型为核心,通过多层级平行四边形连杆与铰接点构建闭环运动链,具备运动轨迹可控、结构刚性强、驱动扭矩需求低的特点;模型顶部配置电机驱动单元,可通过连杆传动放大推力,实现腿部屈伸与支撑动作,末端脚端可加装防滑垫或力传感器适配行走等场景,适合作为原型机开发或教学演示方案。
