基于视觉的采摘机器人(也可作为垃圾拾取机器人)
发布时间:2025-07-16
-
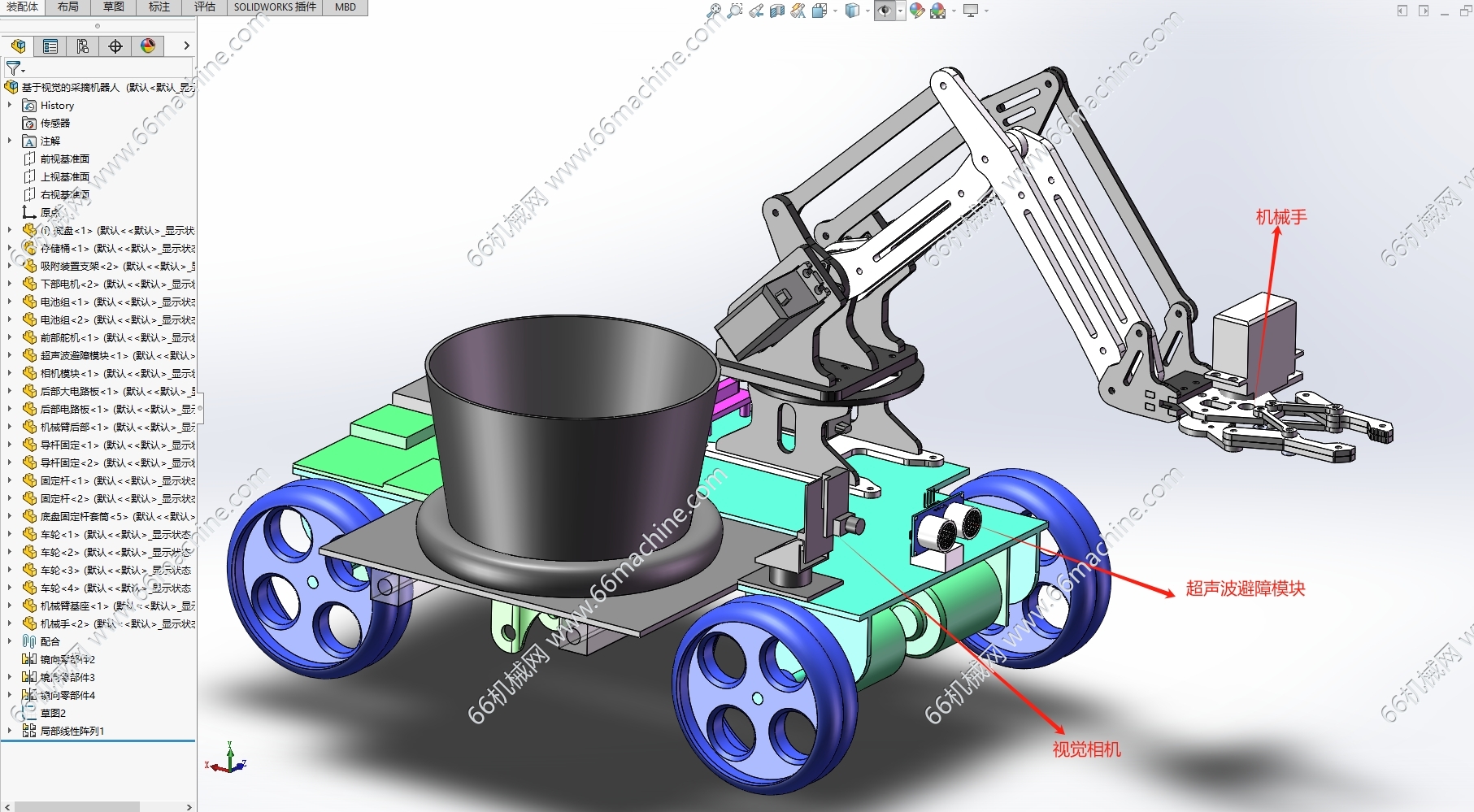
基于视觉的采摘机器人.png
-
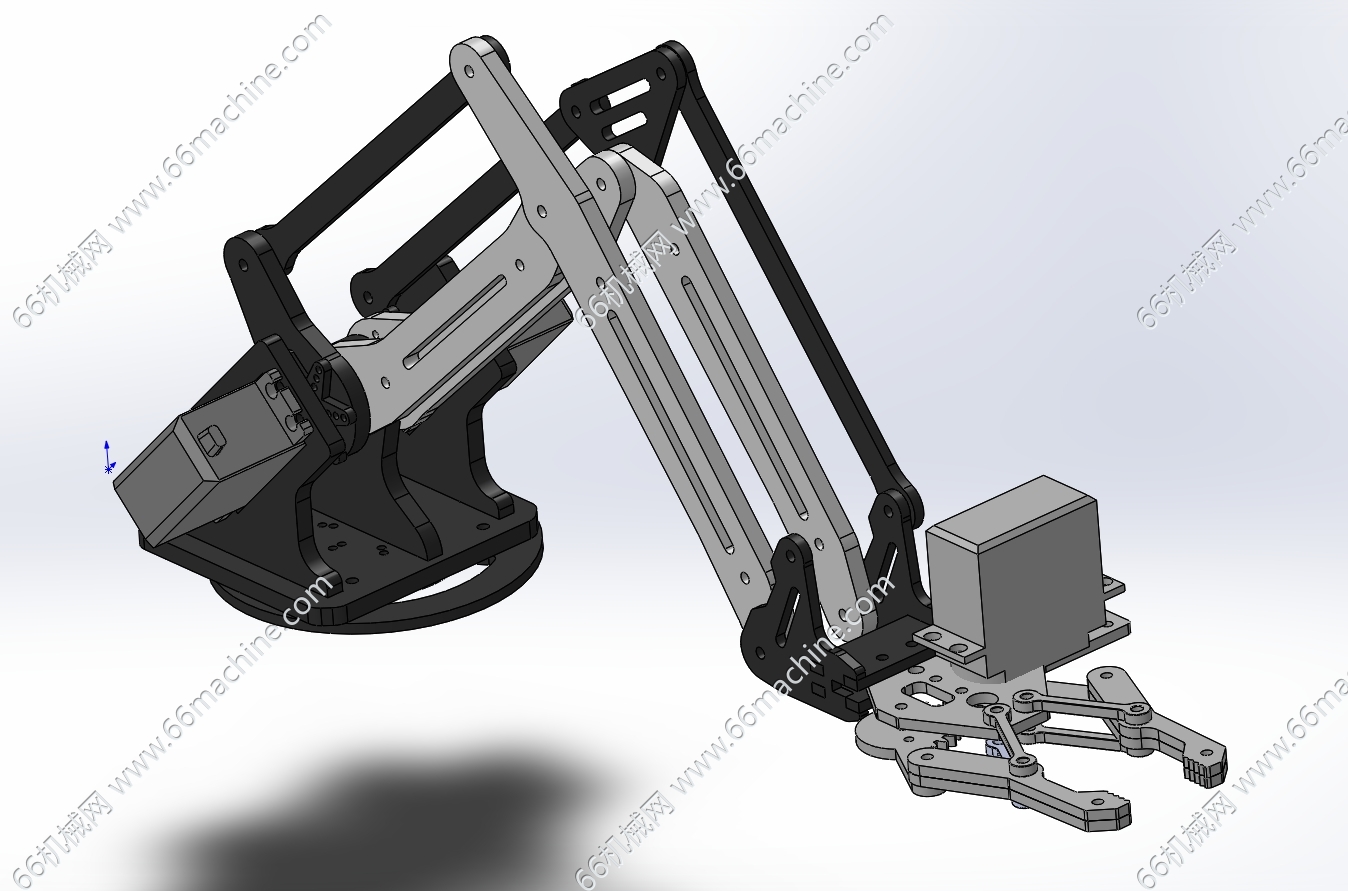
机械手.png
-
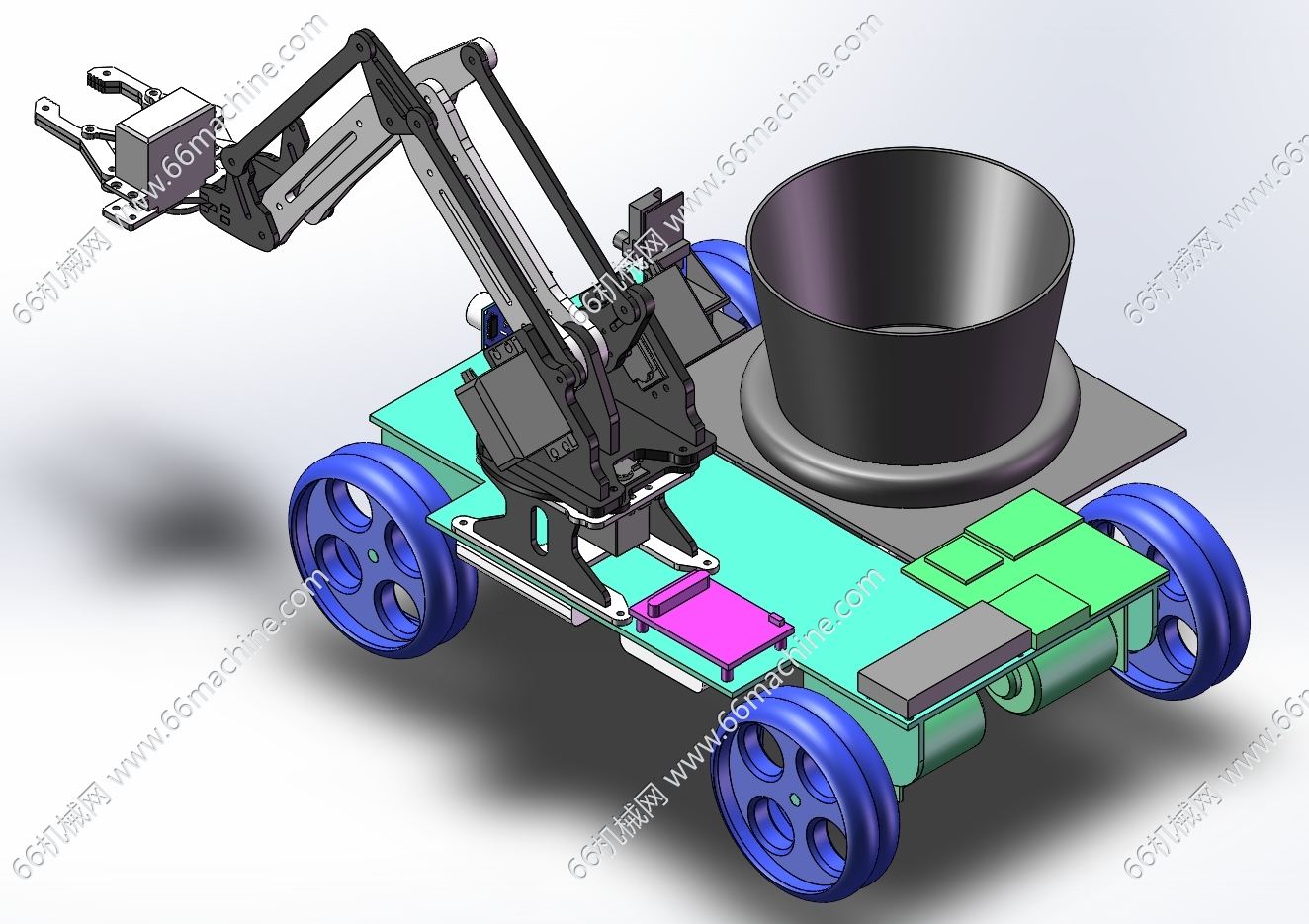
基于视觉的采摘机器人轴测图.png
-
基于视觉的采摘机器人主视图.png
-
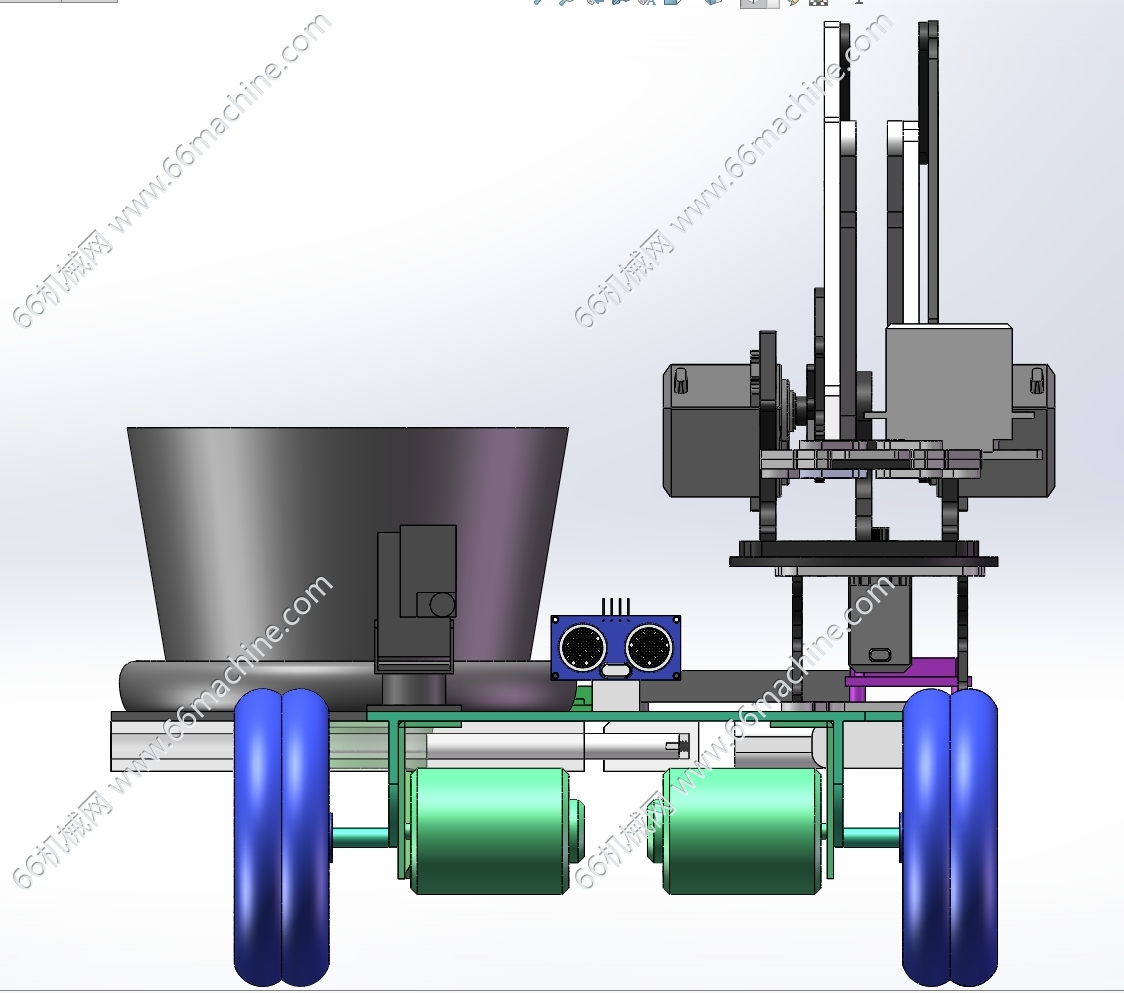
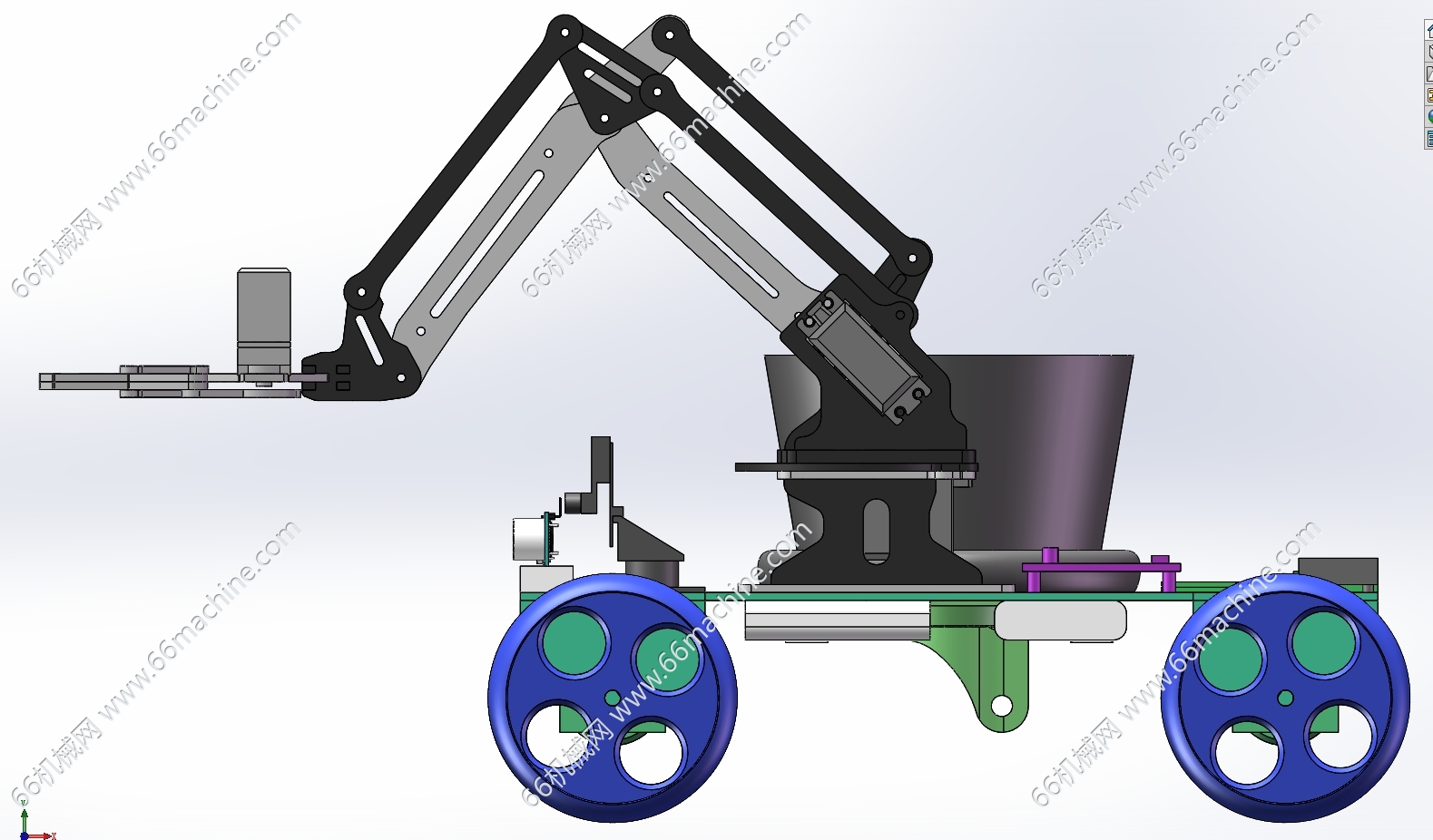
基于视觉的采摘机器人侧视图.png
-
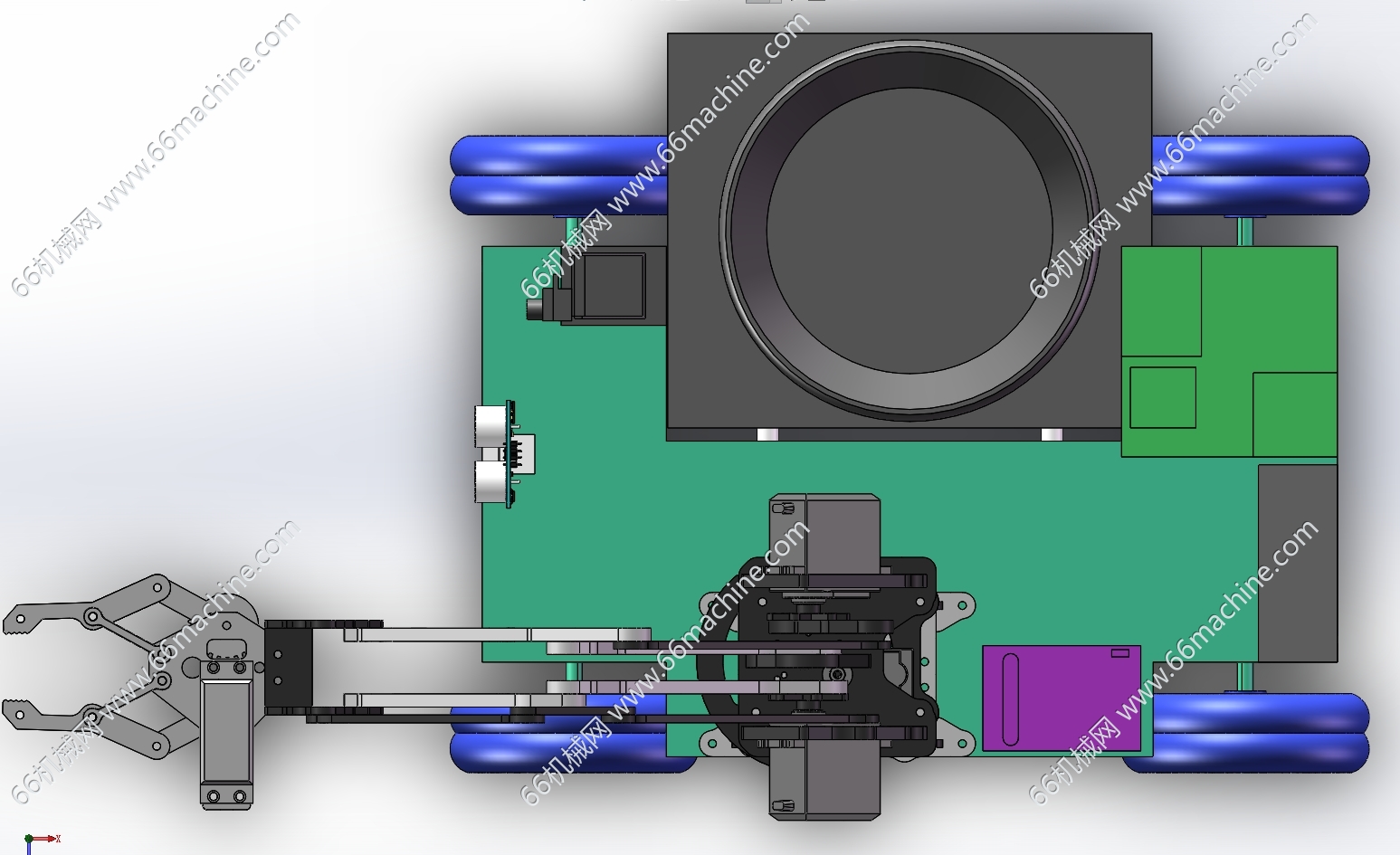
基于视觉的采摘机器人俯视图.png
-
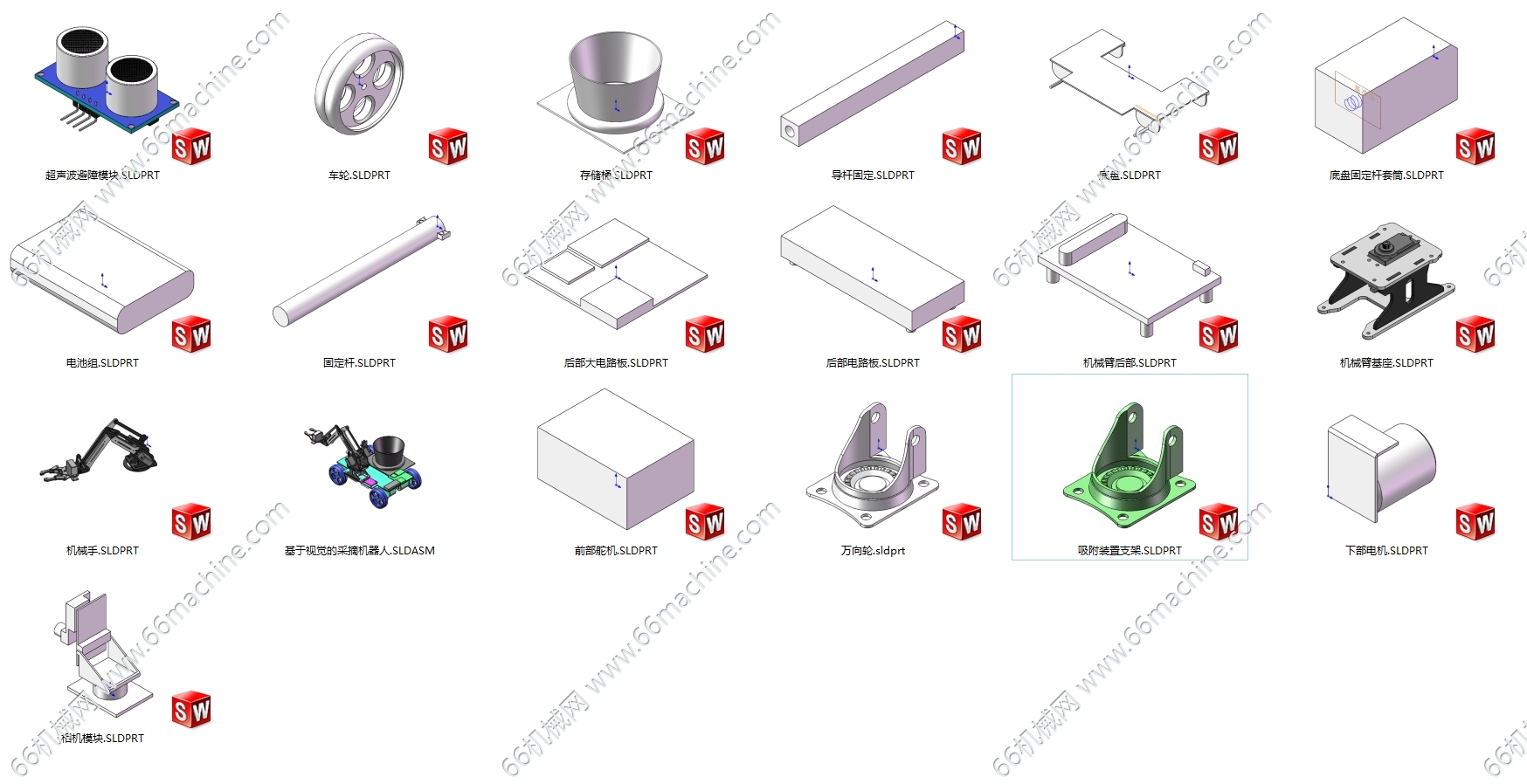
源文件.png
图纸描述
本模型为基于视觉的采摘机器人,通过摄像头与AI图像识别技术精准定位果实。搭载高精度GPS和路径规划系统,机器人能自主导航并避开障碍物,利用机械手完成采摘。该机器人用途广泛,也可作为垃圾拾取机器人,欢迎下载参考!
