视觉引导吸取四轴机器人
发布时间:2026-03-30
-
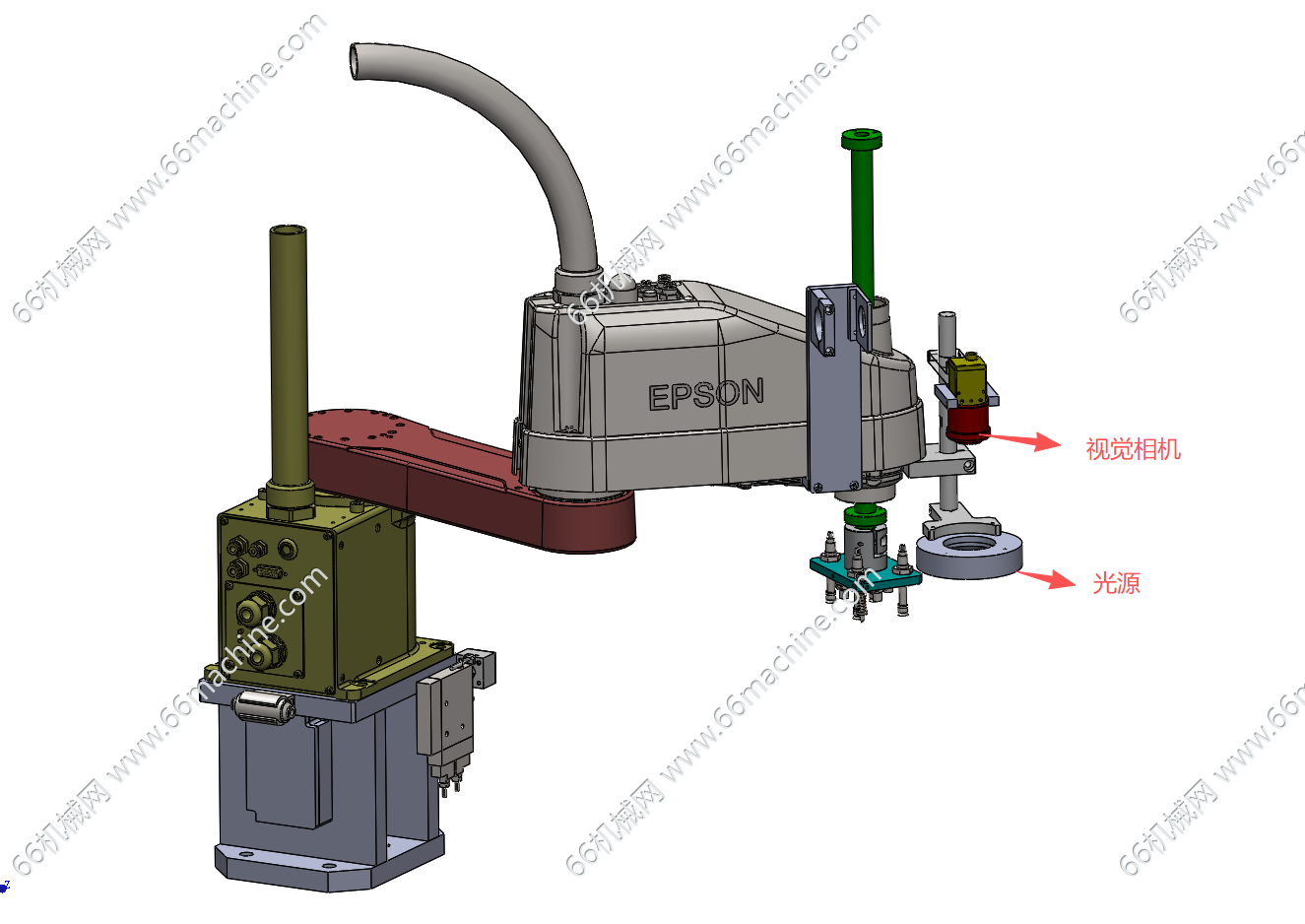
视觉引导吸取四轴机器人.png
-
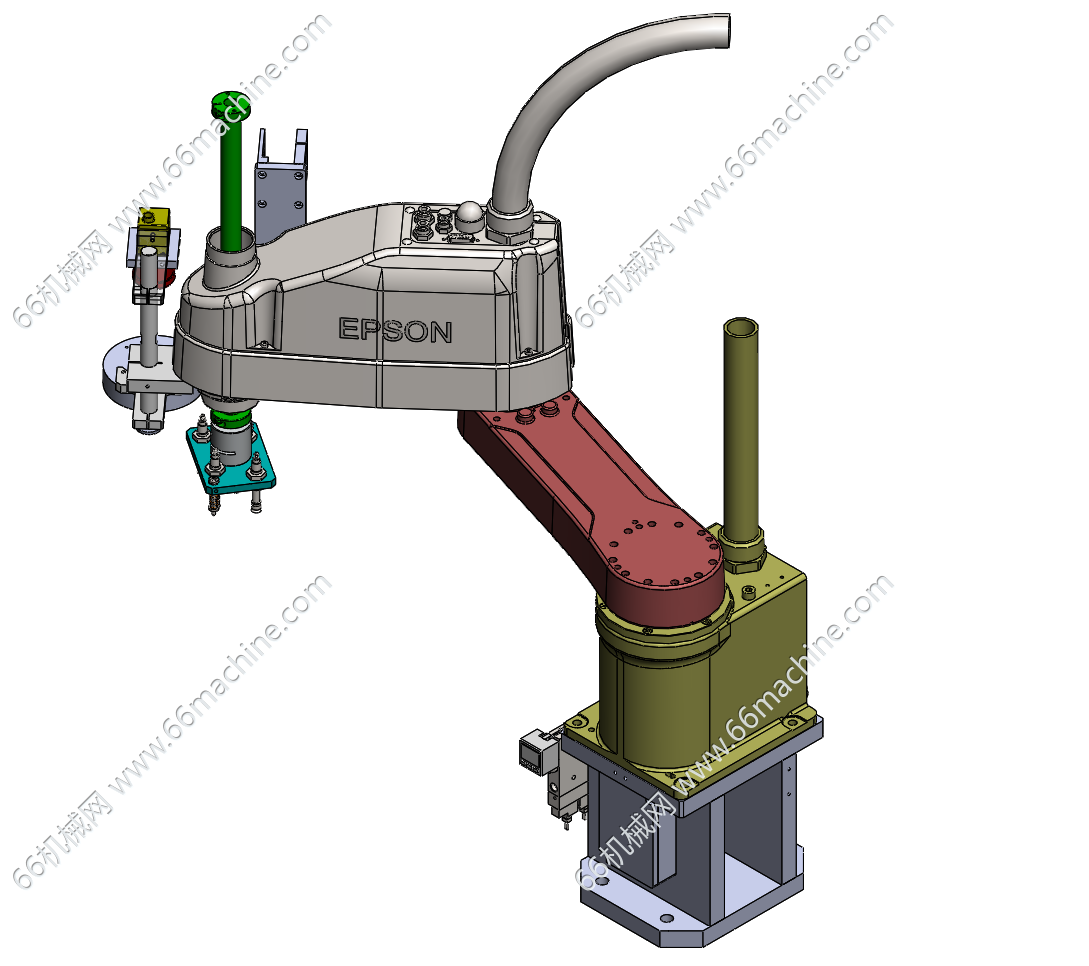
视觉引导吸取四轴机器人轴测图.png
-
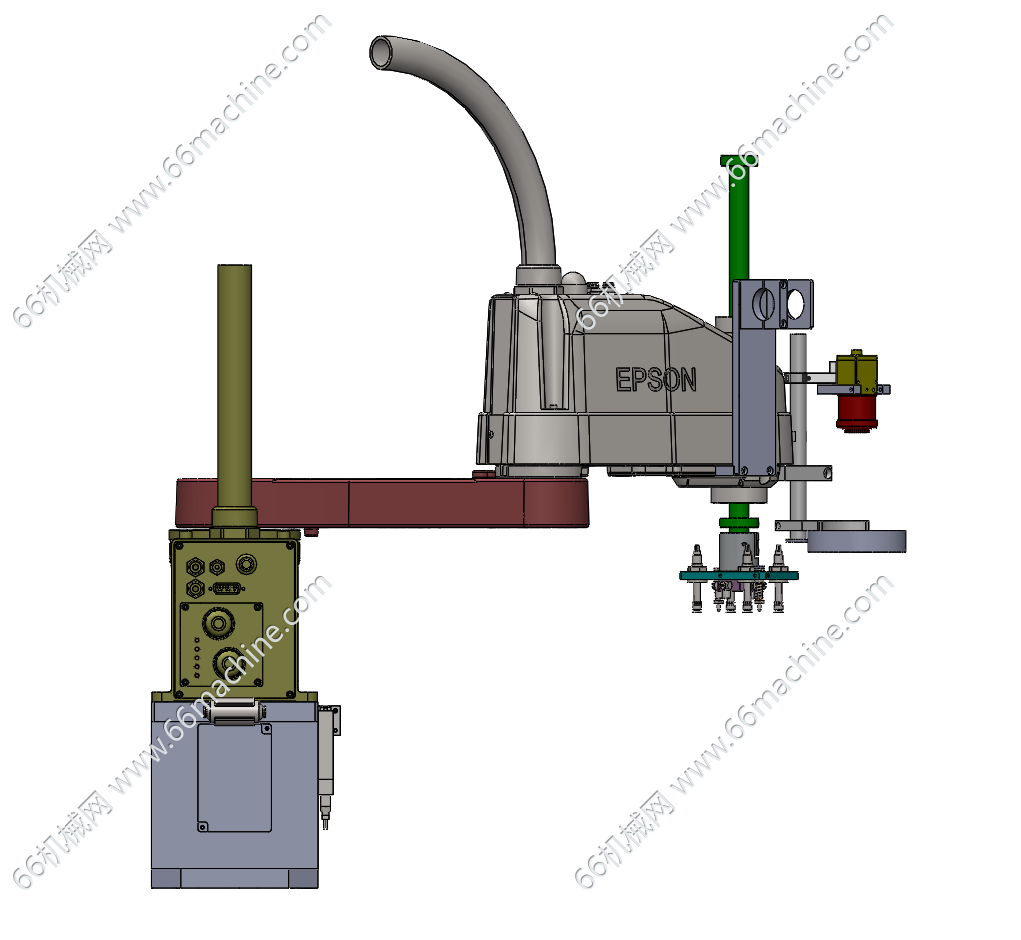
视觉引导吸取四轴机器人主视图.png
-
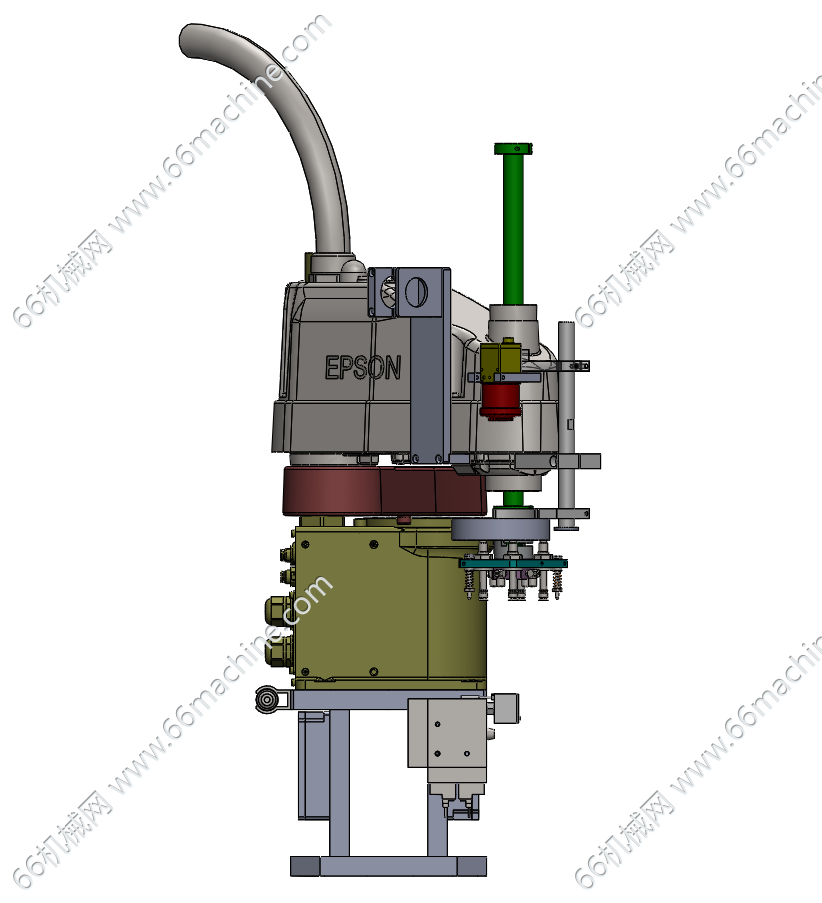
视觉引导吸取四轴机器人侧视图.png
-
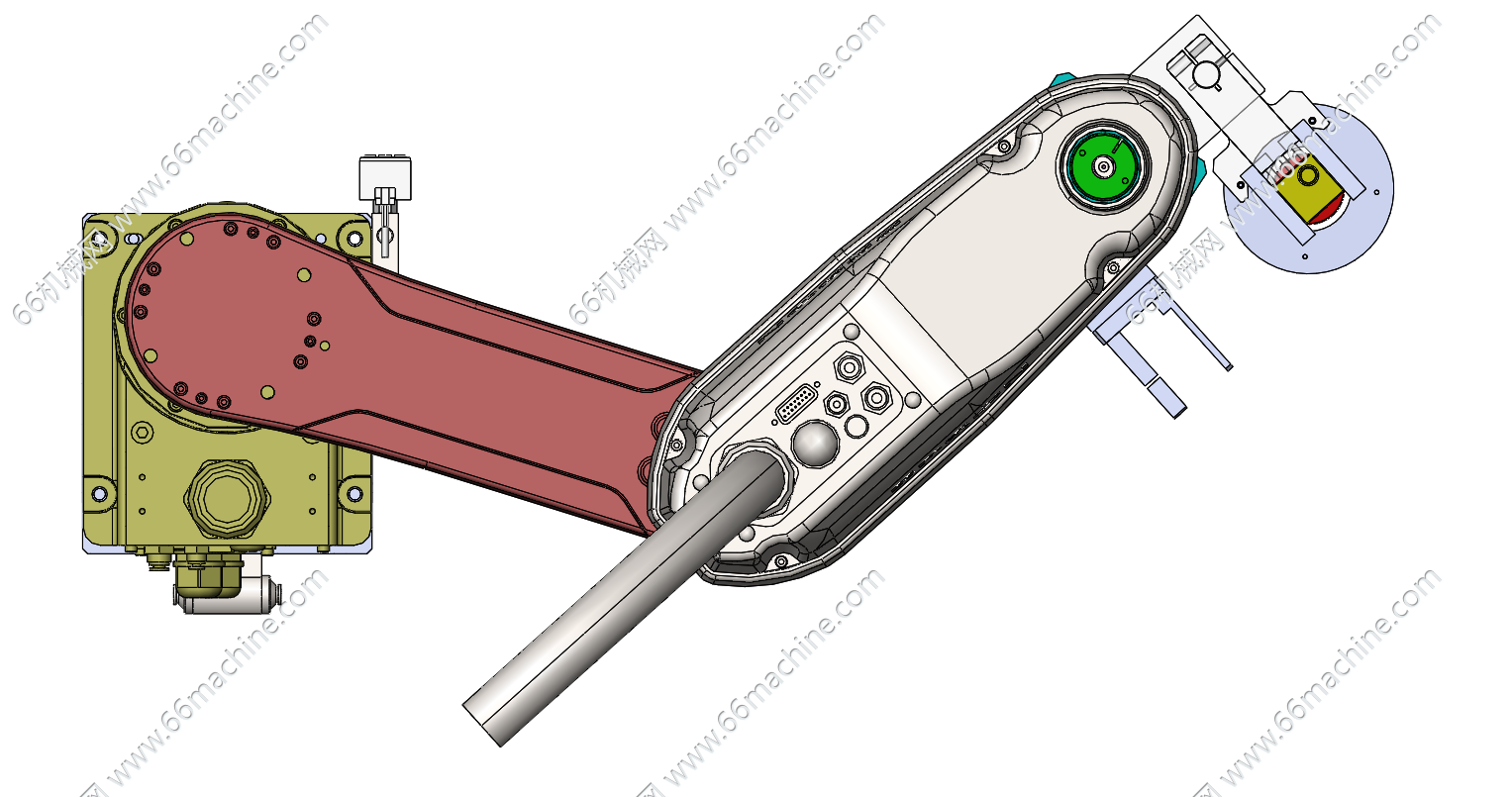
视觉引导吸取四轴机器人俯视图.png
图纸描述
本模型为视觉引导吸取四轴机器人,以爱普生水平多关节机器人为执行主体,集成了视觉相机、环形光源及气动吸嘴,可通过视觉识别工件位置偏差并补偿机器人运动,实现对电子元器件、精密零件等的高精度自动抓取、搬运与装配作业,具备换型灵活、定位精准、运行高效的特点,广泛应用于3C电子、精密制造等自动化产线场景。
