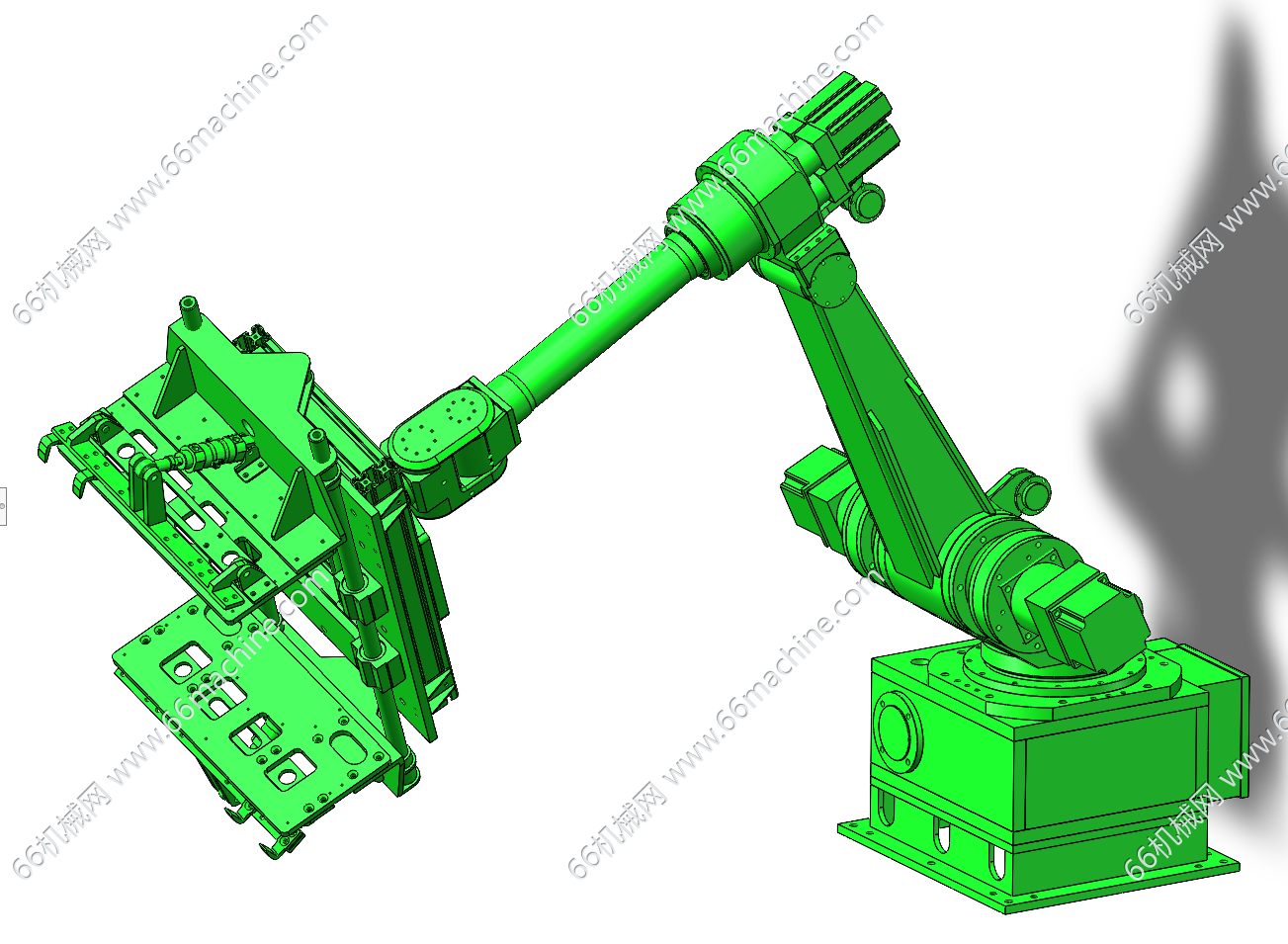
箱体搬运六轴机器人.png
箱体搬运六轴机器人纵剖图.png
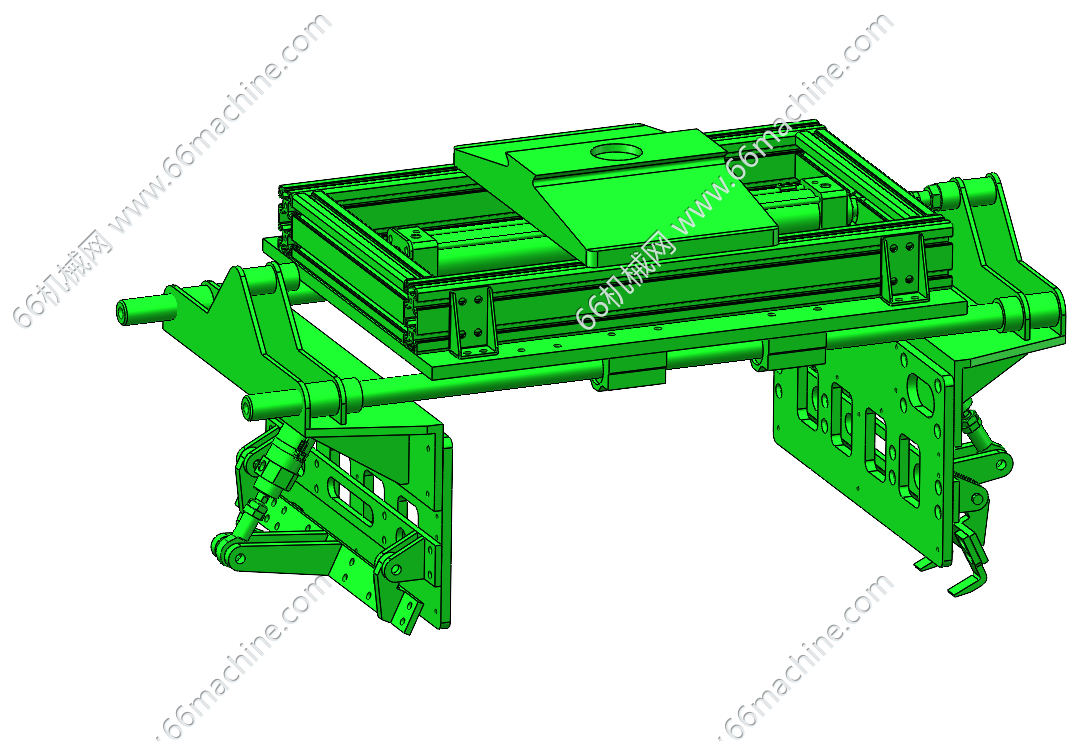
夹持机构.png
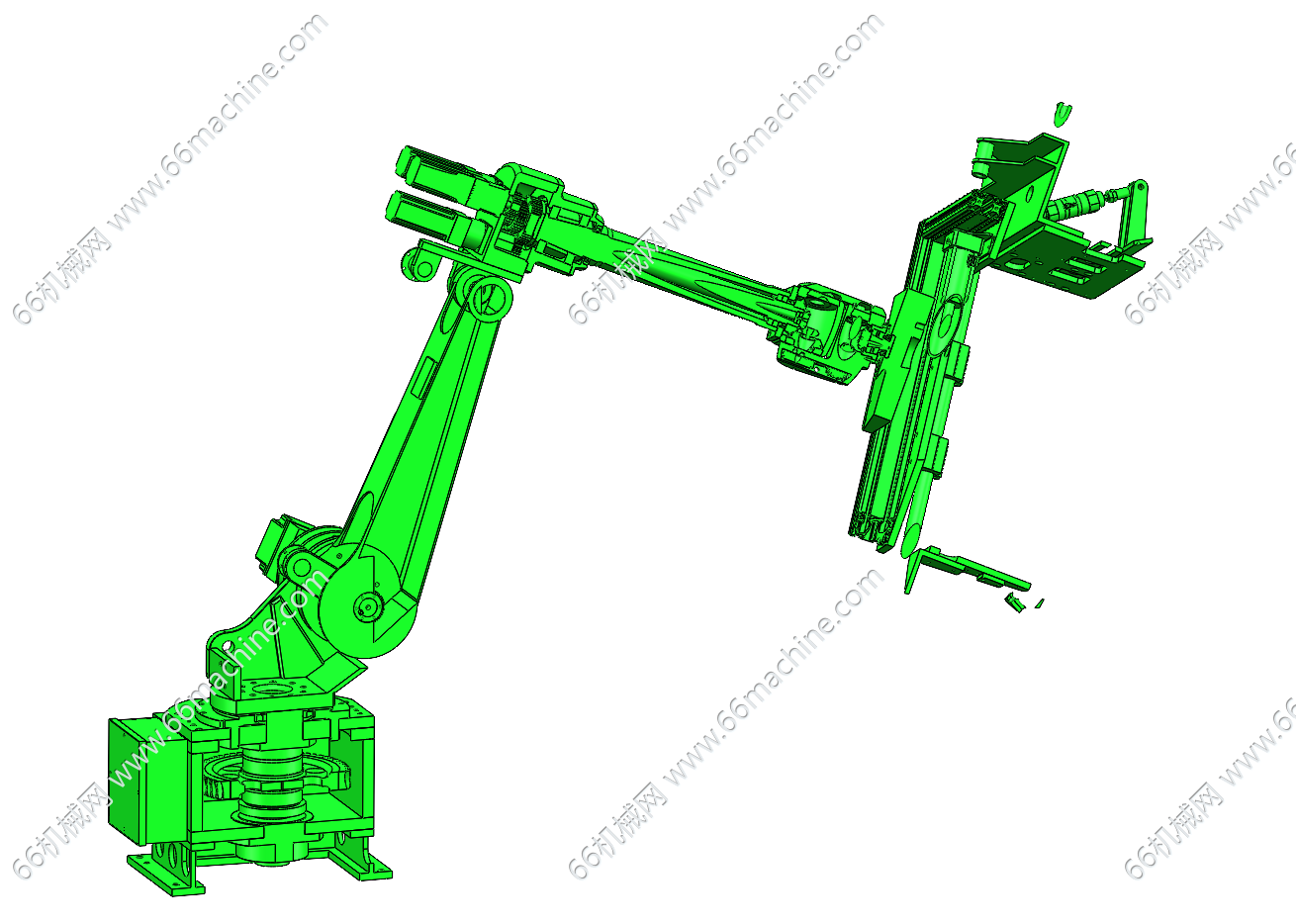
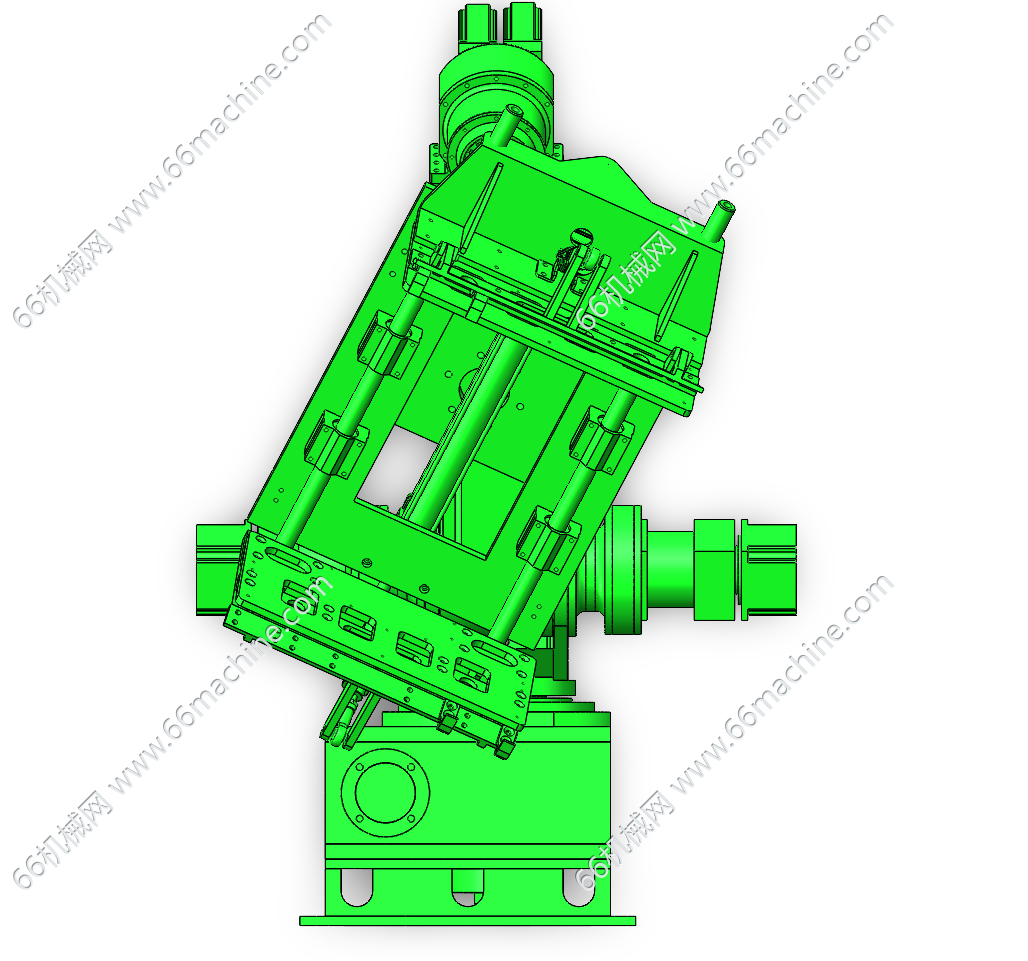
箱体搬运六轴机器人主视图.png
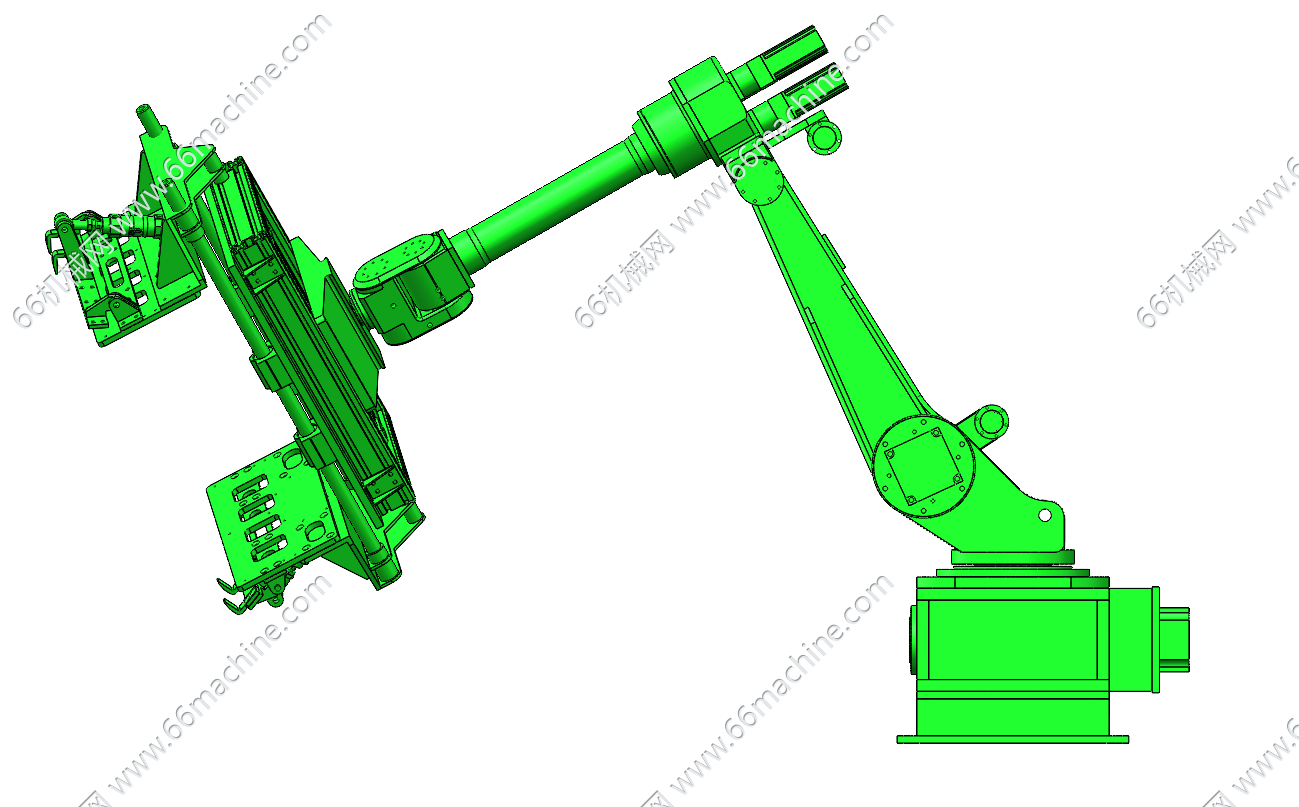
箱体搬运六轴机器人侧视图.png
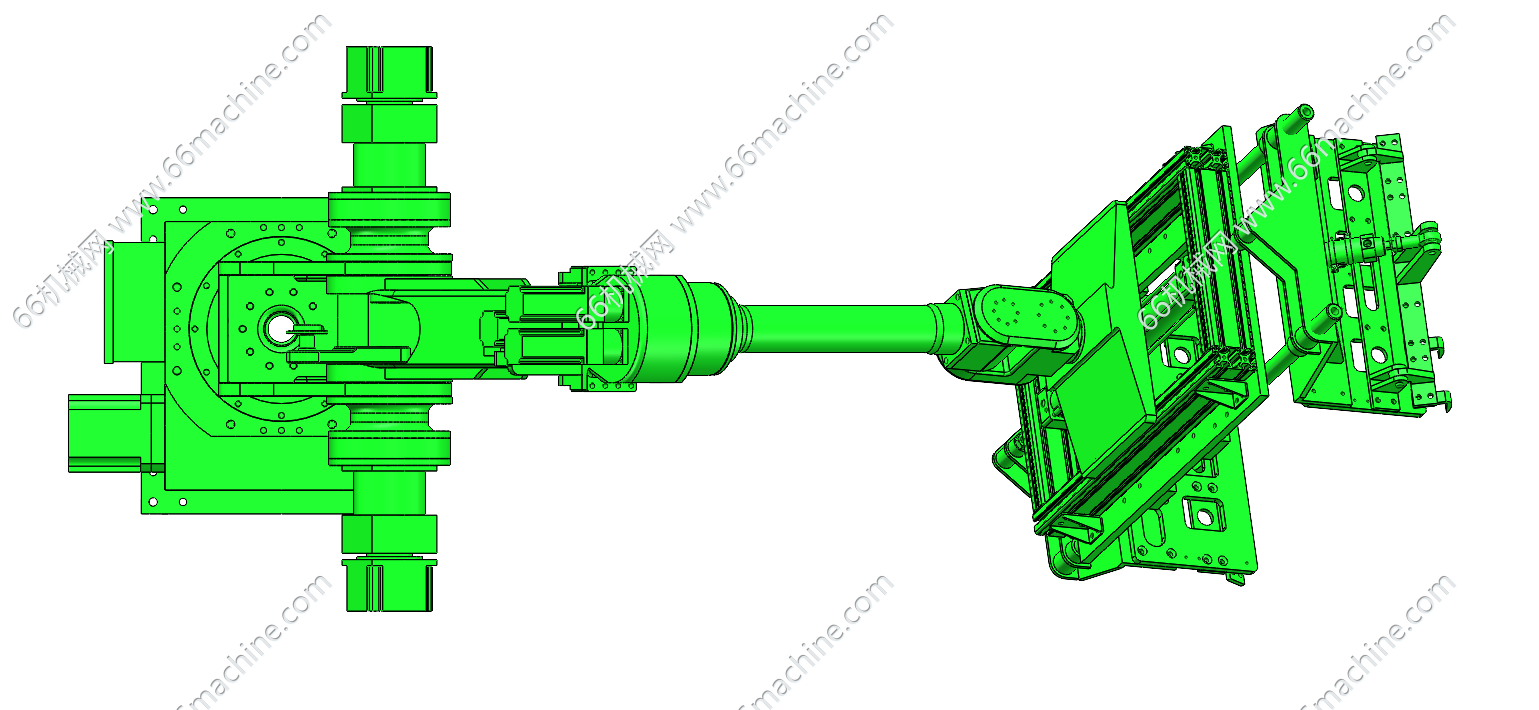
箱体搬运六轴机器人俯视图.png
源文件.png
本模型为箱体搬运六轴机器人,由底座、旋转关节、大臂、小臂、腕部关节组成。它具备多自由度,可实现大范围的灵活运动,能在三维空间内精准定位和操作。广泛用于箱体的搬运及跺码作业,欢迎参考!
非标设计
图纸ID: 315092070400397351
图纸格式:SLDPRT、SLDASM
图纸版本:Solidworks2024
文件大小:30.06MB
所需积分:50机械币
可否编辑: 可进行编辑,包含特征参数
关注人数:0人