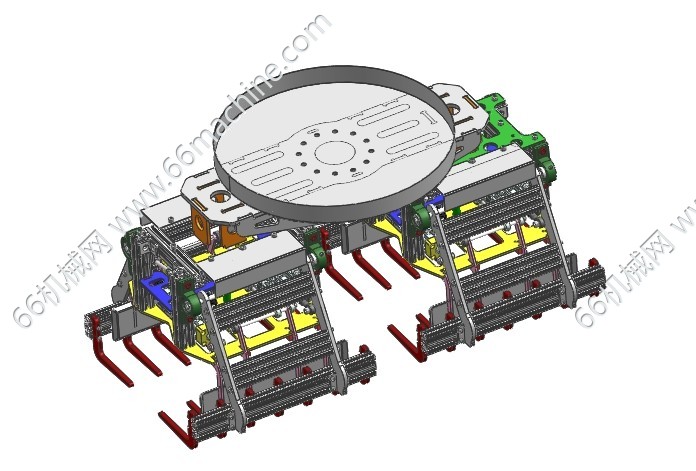
装配图.jpg
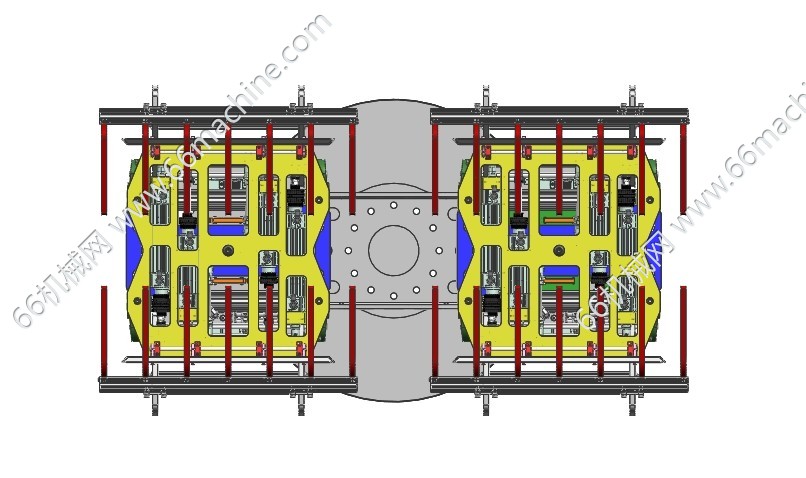
俯视图.jpg
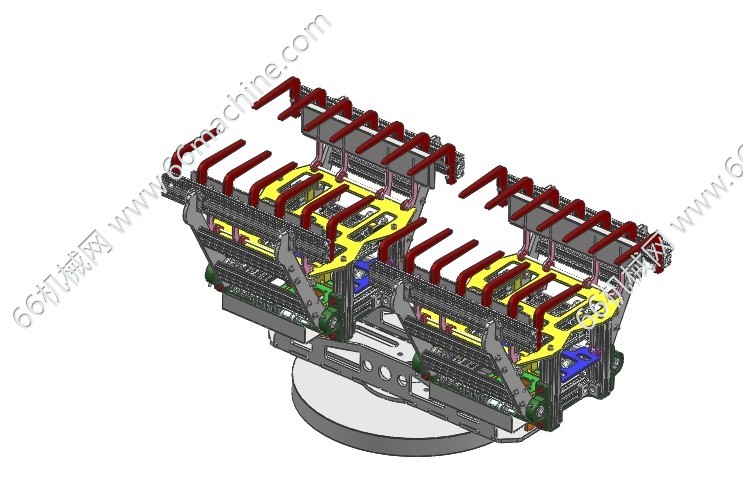
侧视图.jpg
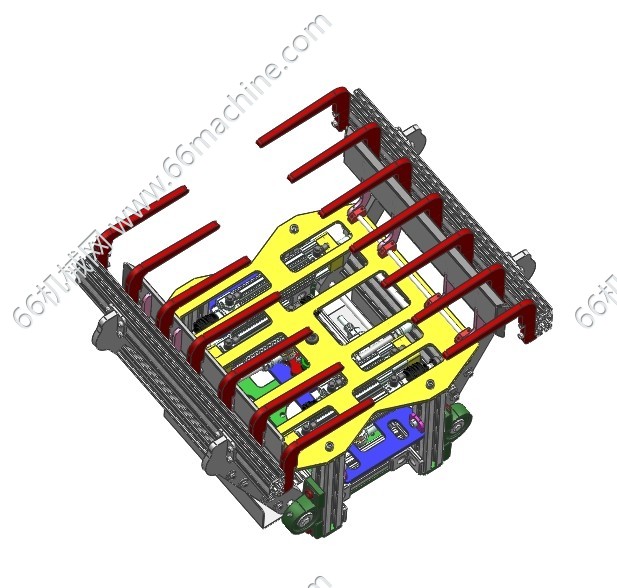
夹手.jpg
正视图.jpg
左视图.jpg
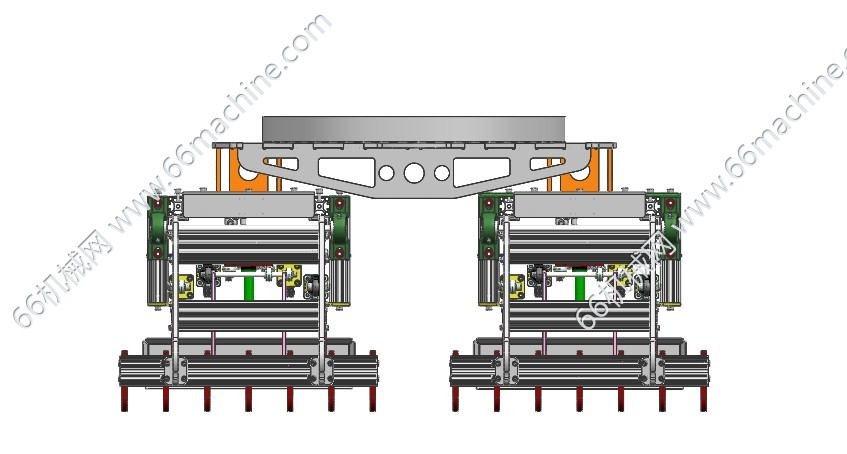
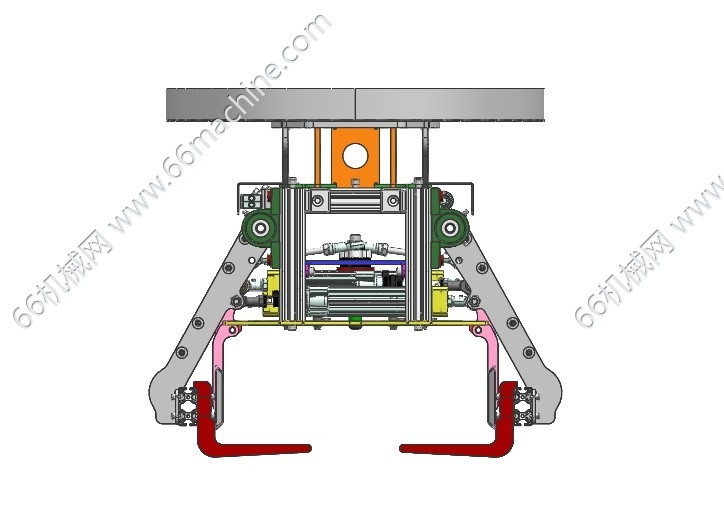
模块化设计的码垛夹具,可用于两个纸箱的抓取及码垛动作,适用工业机器人,及桁架机器人, 整体细节很详细,可根据负载适当修改部门板厚及气缸选型即可。
我要成为大胖纸
图纸ID: 315092070396205203
图纸格式:stp
图纸版本:其它模型软件
文件大小:1.08MB
所需积分:30机械币
可否编辑: 可进行编辑,不包含参数
关注人数:0人