-
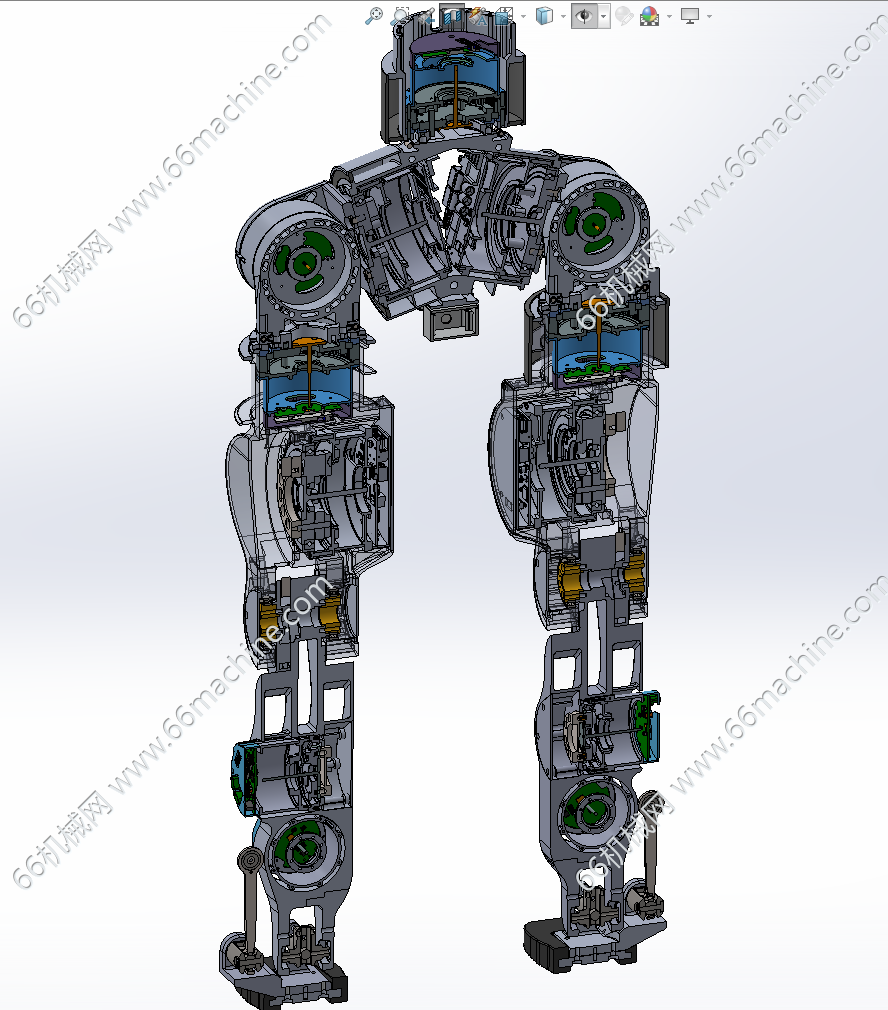
人形机器人下半身纵剖图.png
-
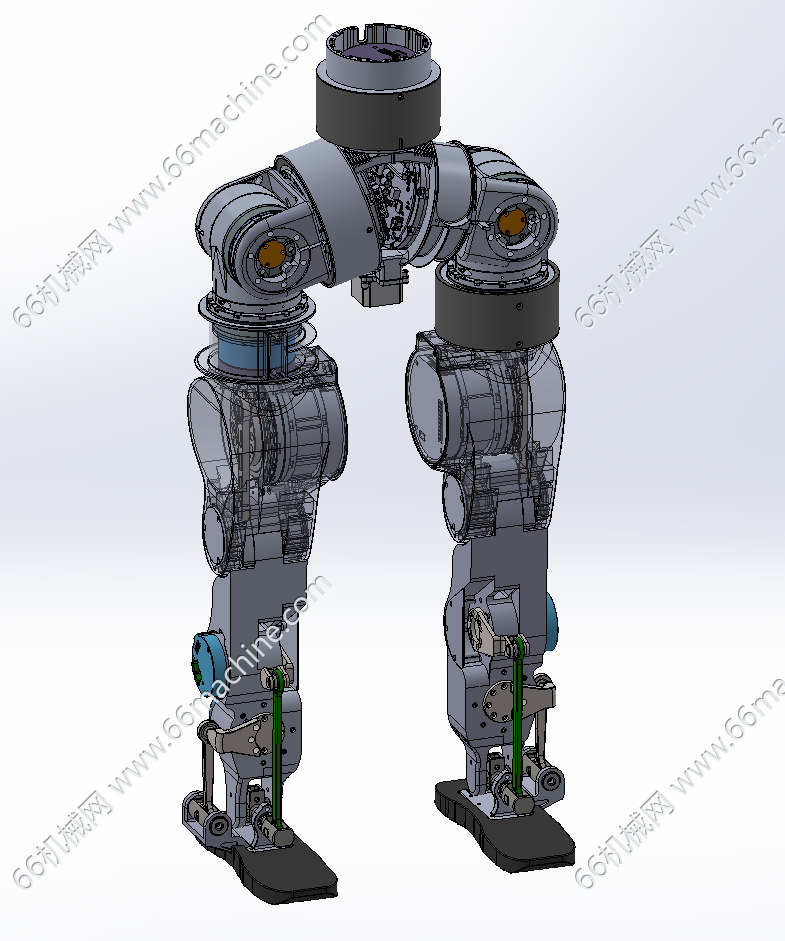
人形机器人下半身.png
-
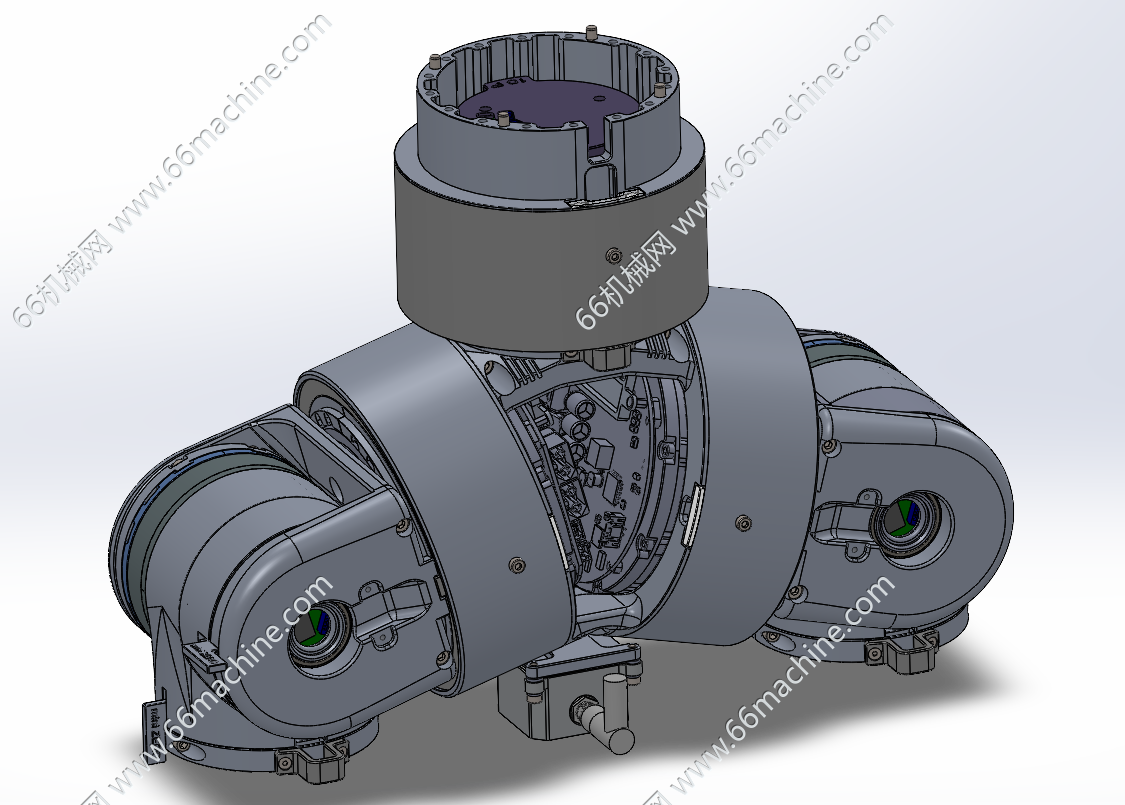
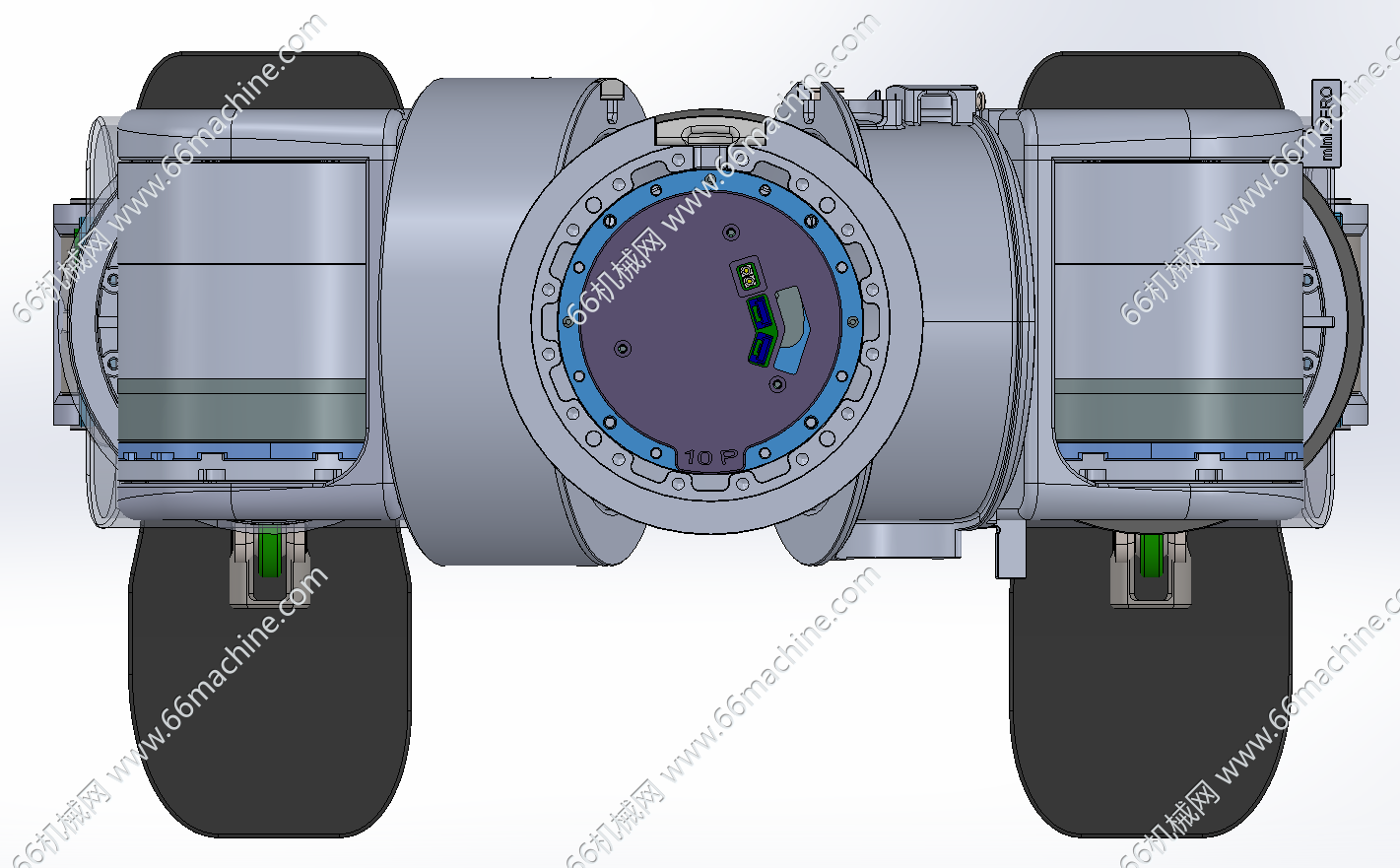
腰髋整体.png
-
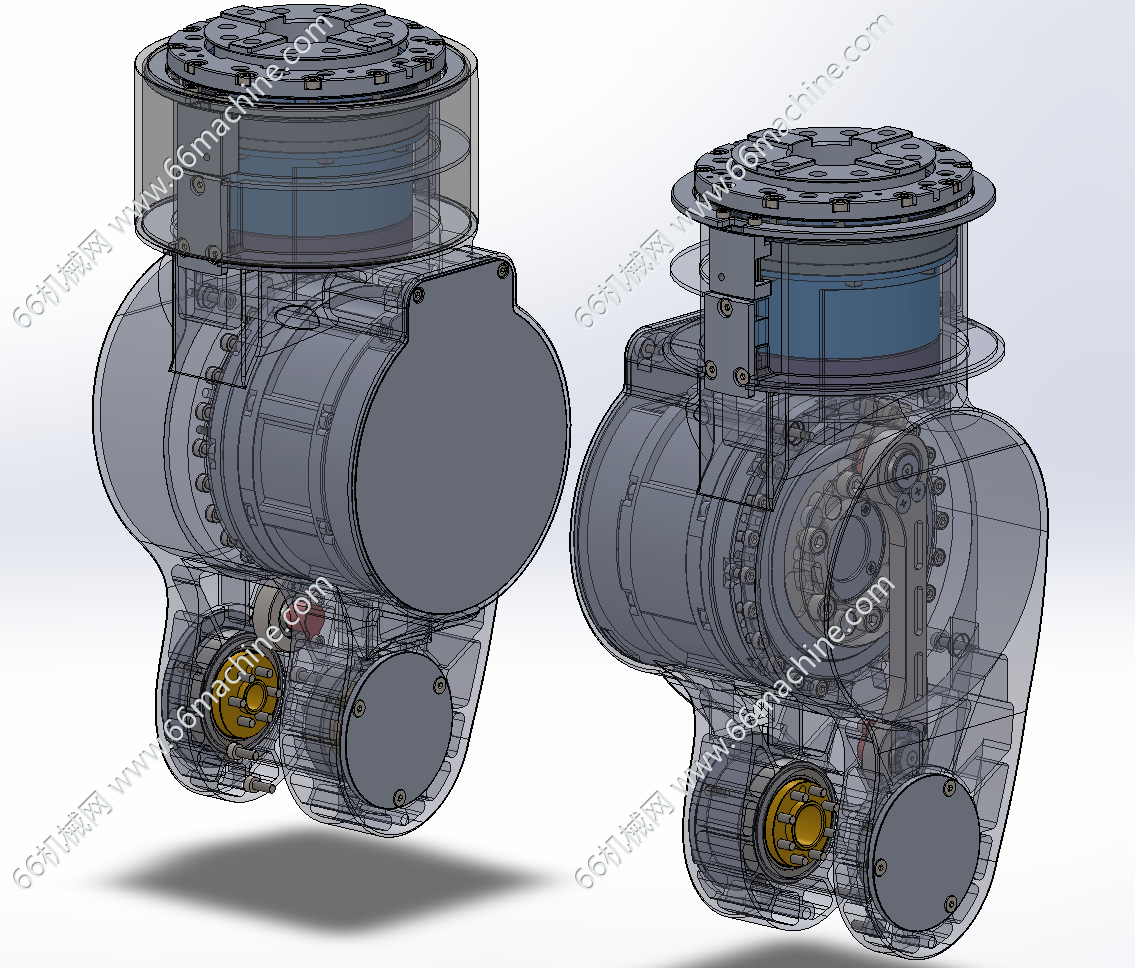
下肢大腿.png
-
下肢小腿.png
-
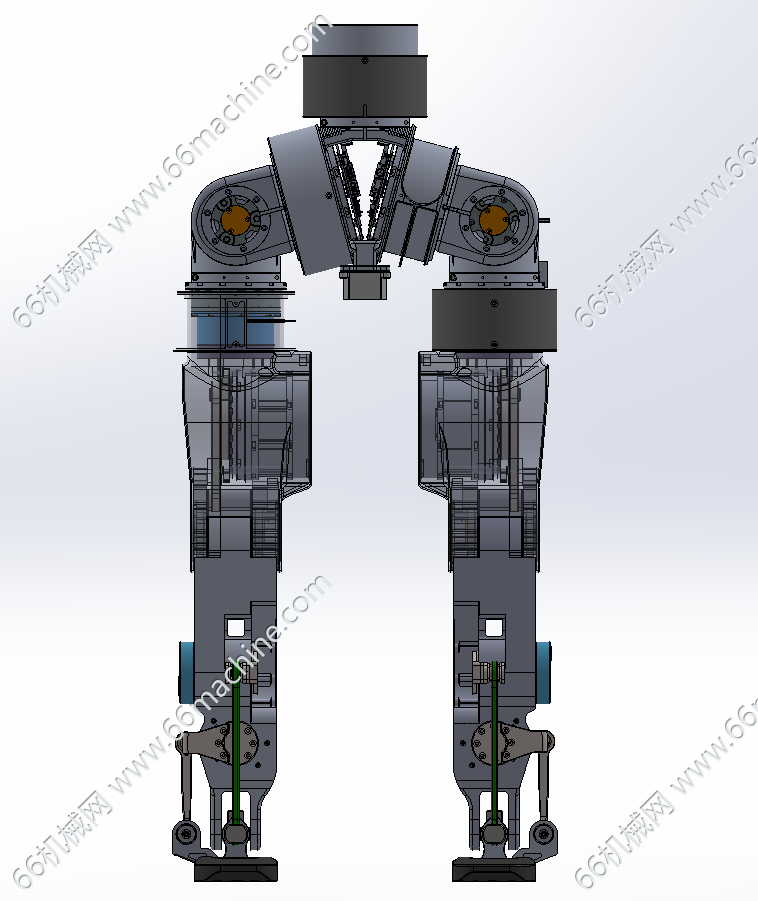
人形机器人下半身主视图.png
-
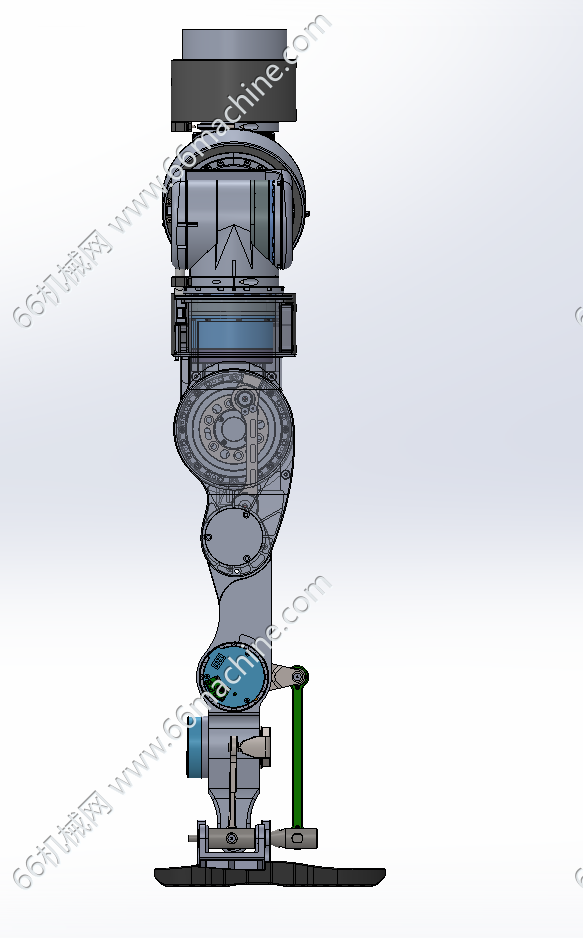
人形机器人下半身侧视图.png
-
人形机器人下半身俯视图.png
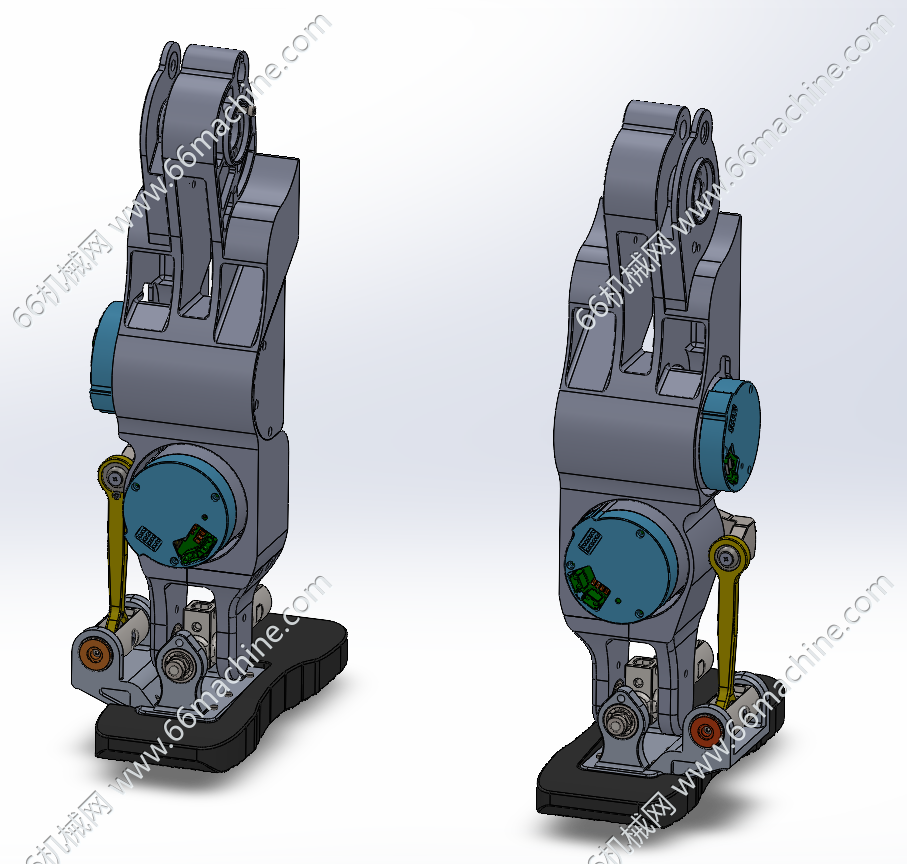
图纸描述
本模型为人形机器人的下半身部分,包含腰部、髋关节、大腿、小腿、脚踝等。集成了多个高扭矩关节电机、精密减速器以及力/力矩传感器,拥有多个自由度,拥有高度仿生双腿构型和拟人化的运动控制,覆盖人体下半身的主要自由度,具备快速行走、敏捷避障、稳健上下坡、抗冲击干扰、跳跃、跨越、自主避障等运动功能,是通用人工智能的理想载体。本模型为sw2024版本,另含x-t通用格式,欢迎参考!
