爬杆机器人.png
爬杆机器人轴测图.png
爬杆机器人主视图.png
爬杆机器人侧视图.png
爬杆机器人俯视图.png
源文件.png
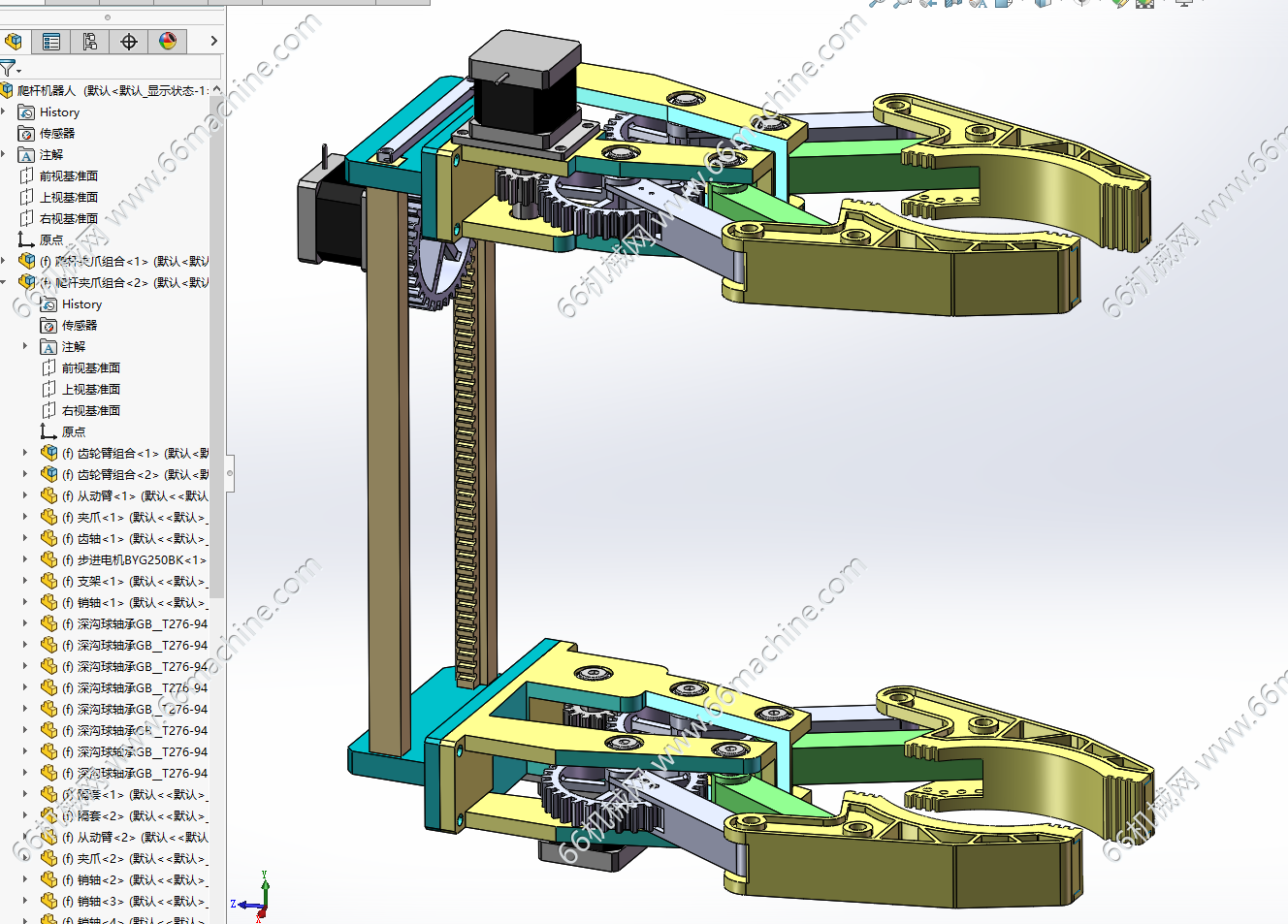
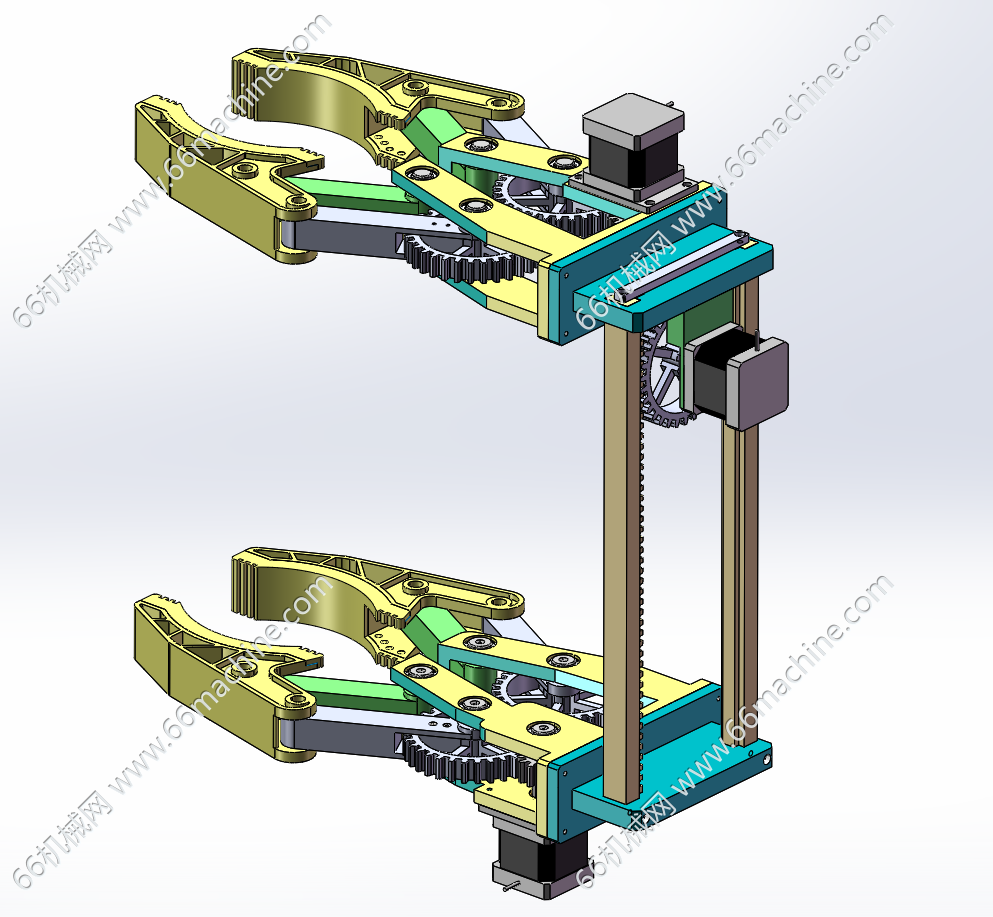
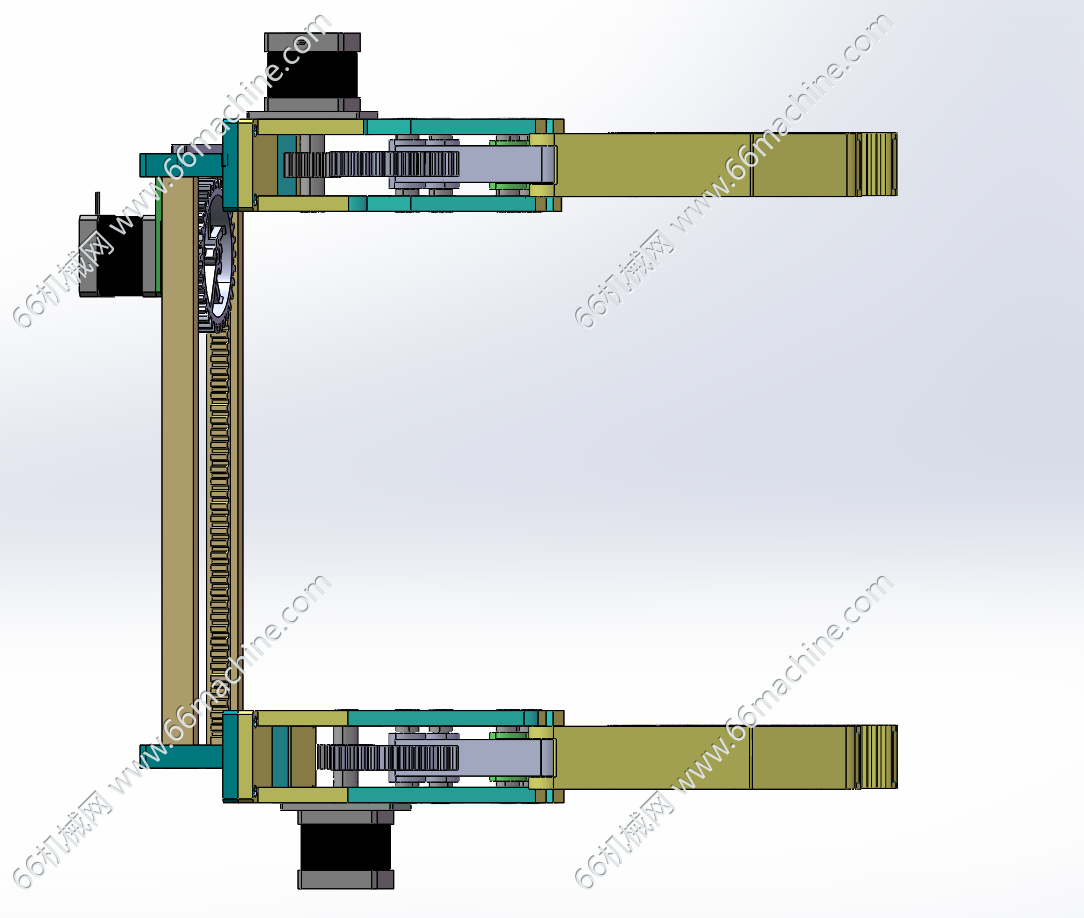
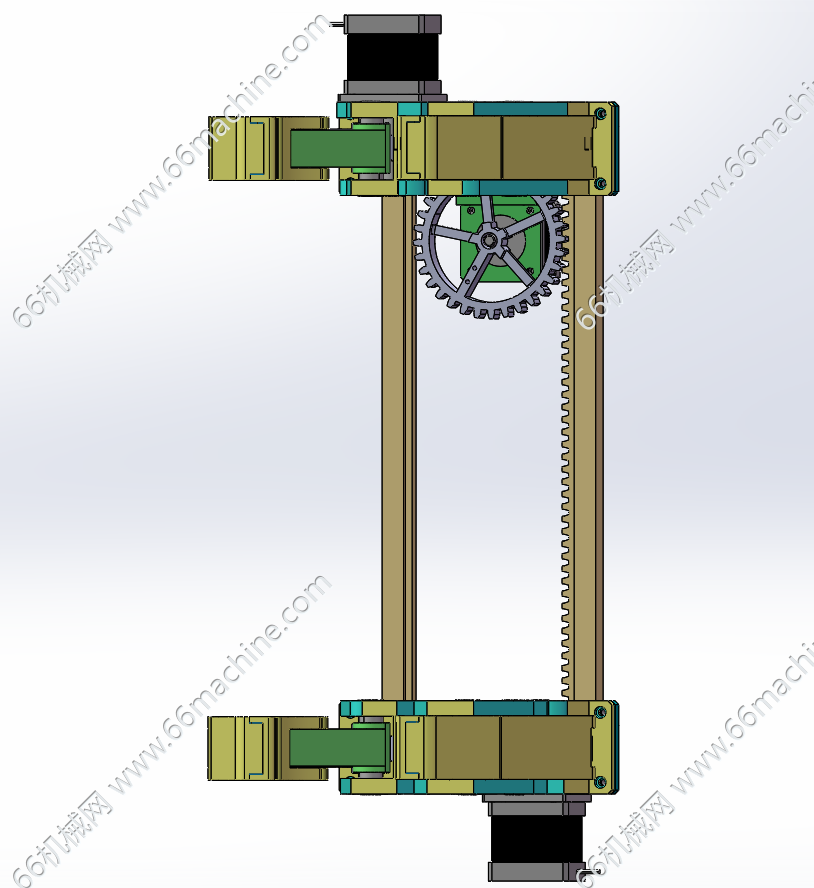
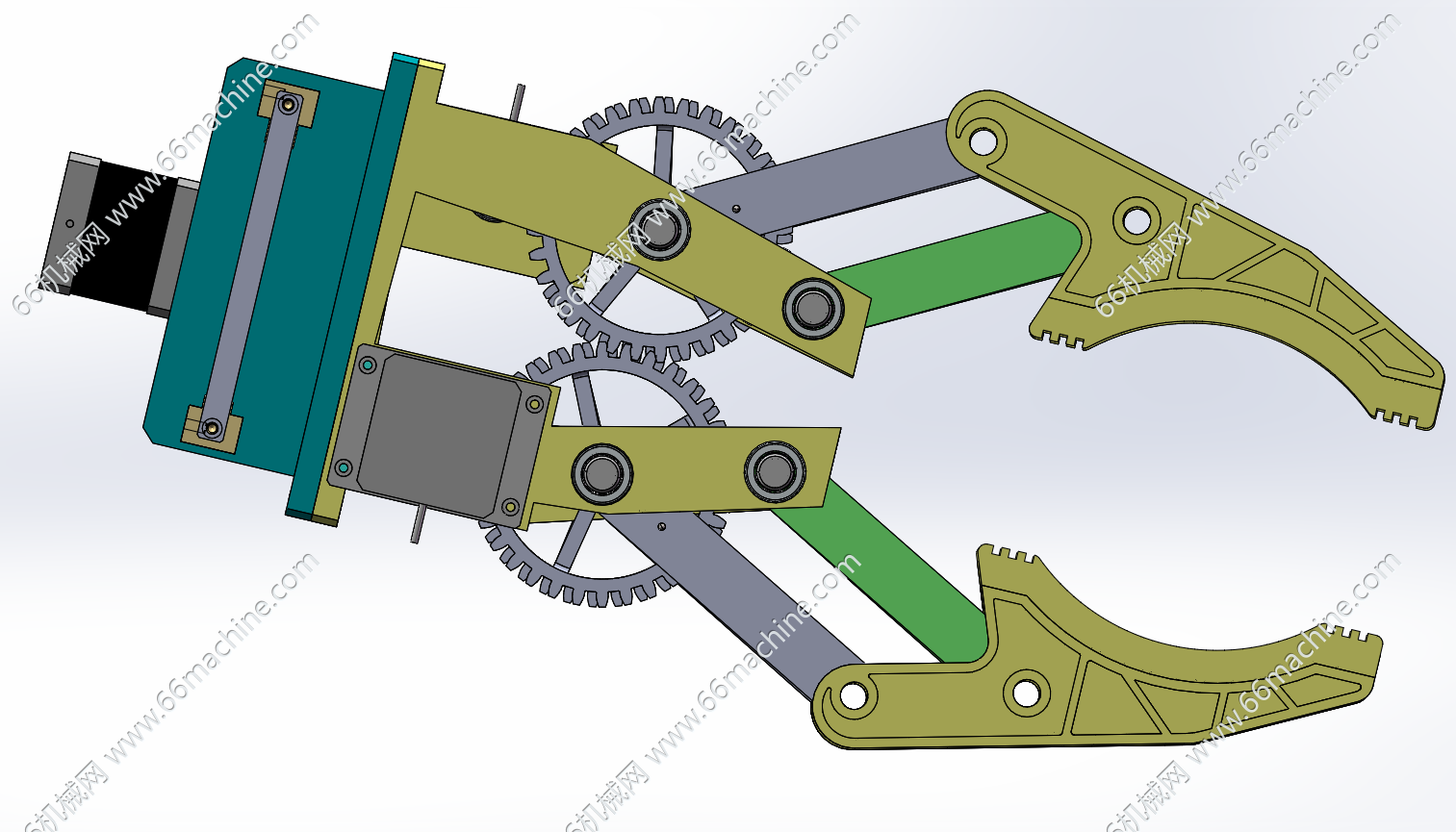
本模型为爬杆机器人,使用夹爪腿来移动,并具有足够的力量和灵活性来爬过各种高度和形状的障碍物,如栏杆、树干、电线杆等。这种机器人通常由多个齿轮、传感器和控制器电机组成,可以通过无线遥控或自主控制来操作。
非标设计
图纸ID: 315092070396204898
图纸格式:SLDPRT、SLDASM
图纸版本:Solidworks2018
文件大小:6.31MB
所需积分:40机械币
可否编辑: 可进行编辑,不包含参数
关注人数:0人