5指柔性仿生机械手
发布时间:2026-03-24
-
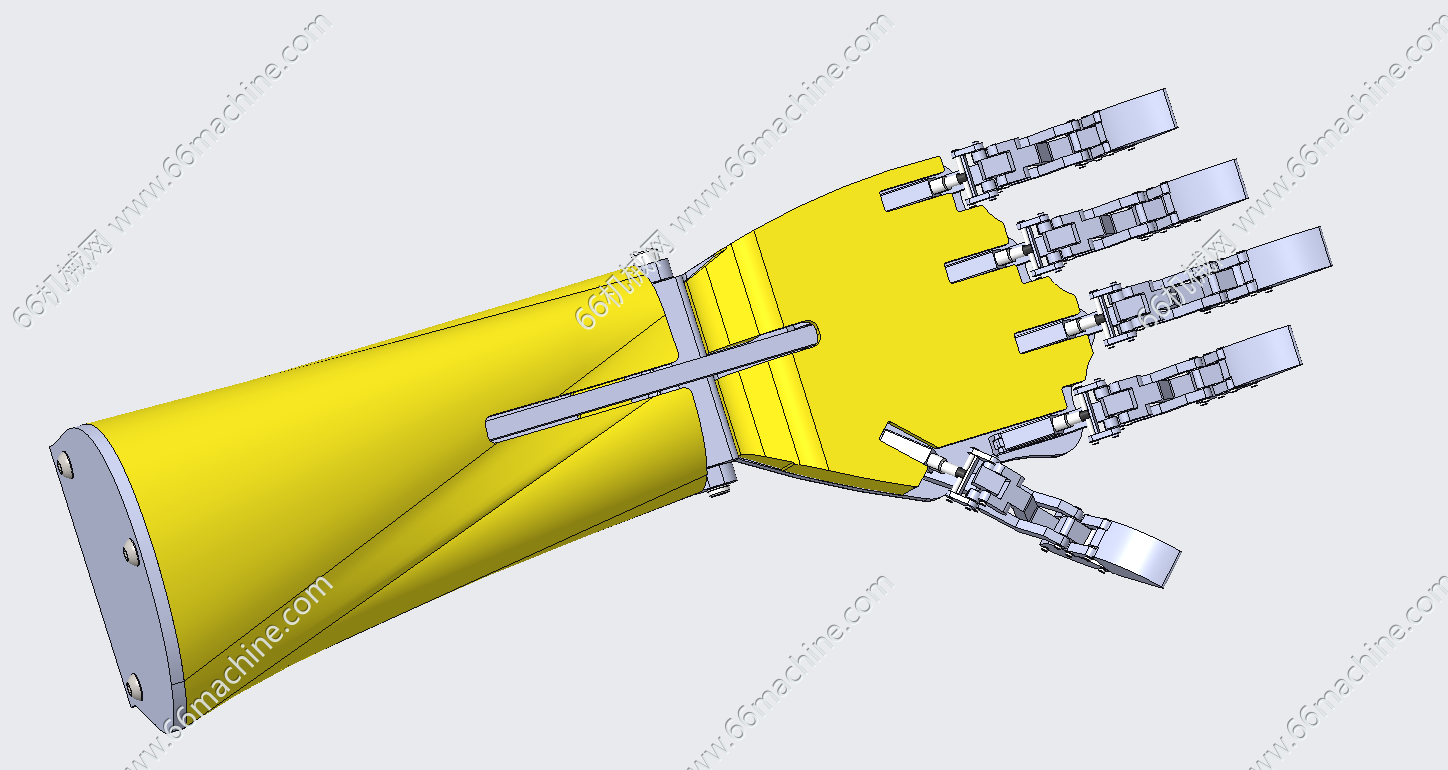
5指柔性仿生机械手.png
-
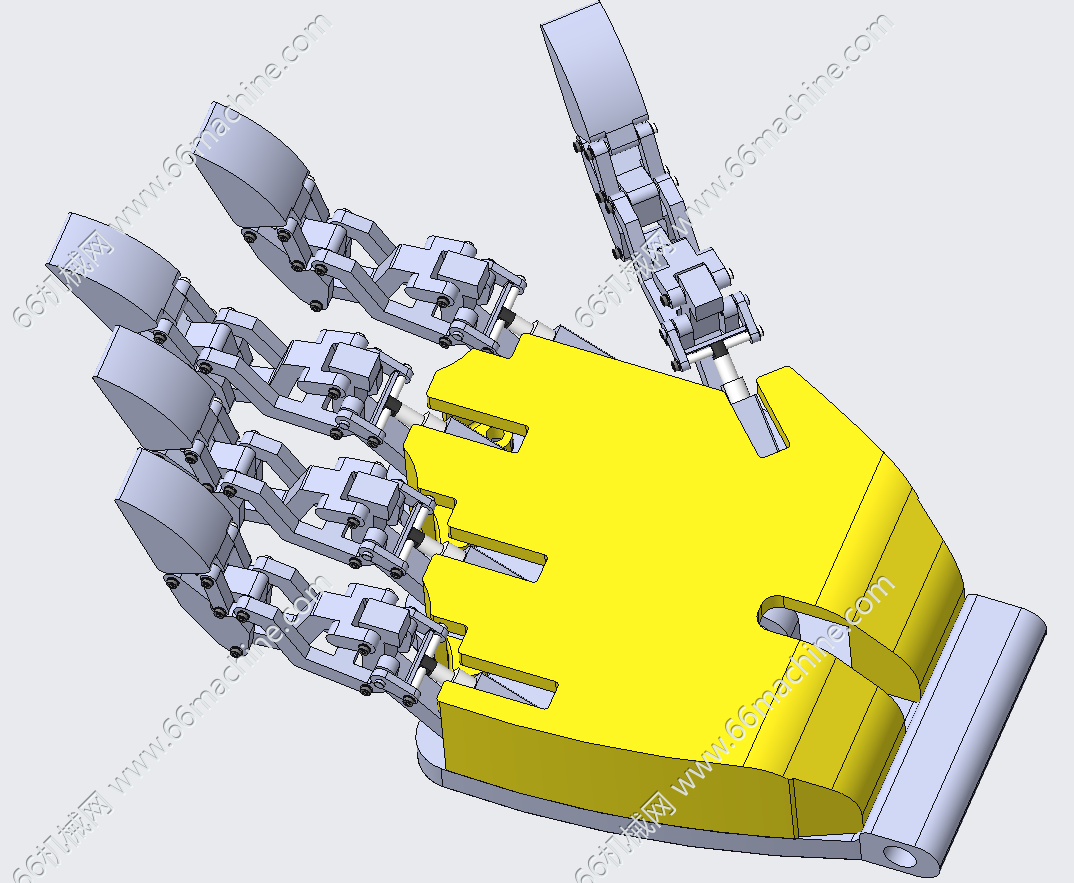
手掌.png
-
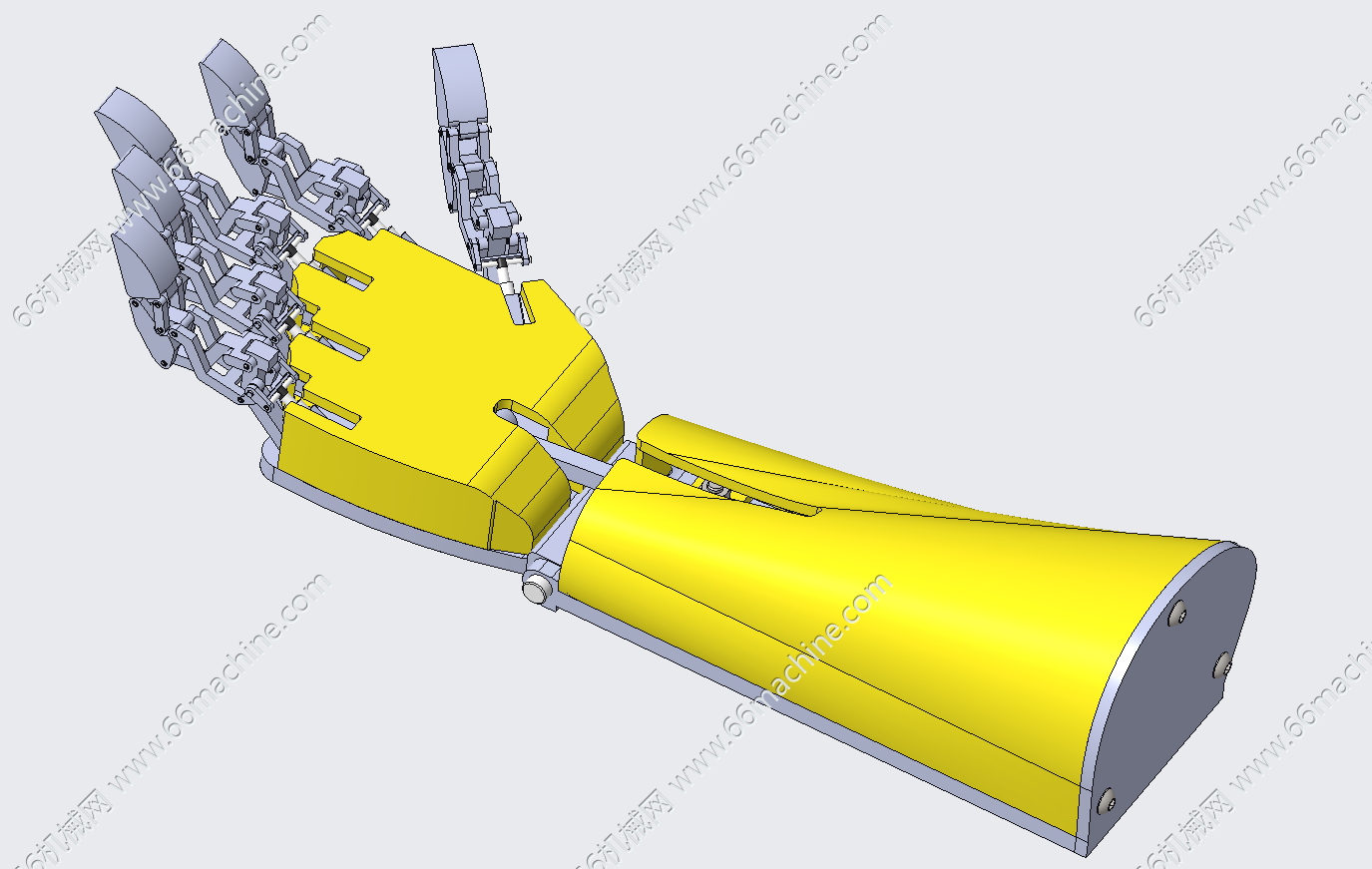
5指柔性仿生机械手轴测图.png
-
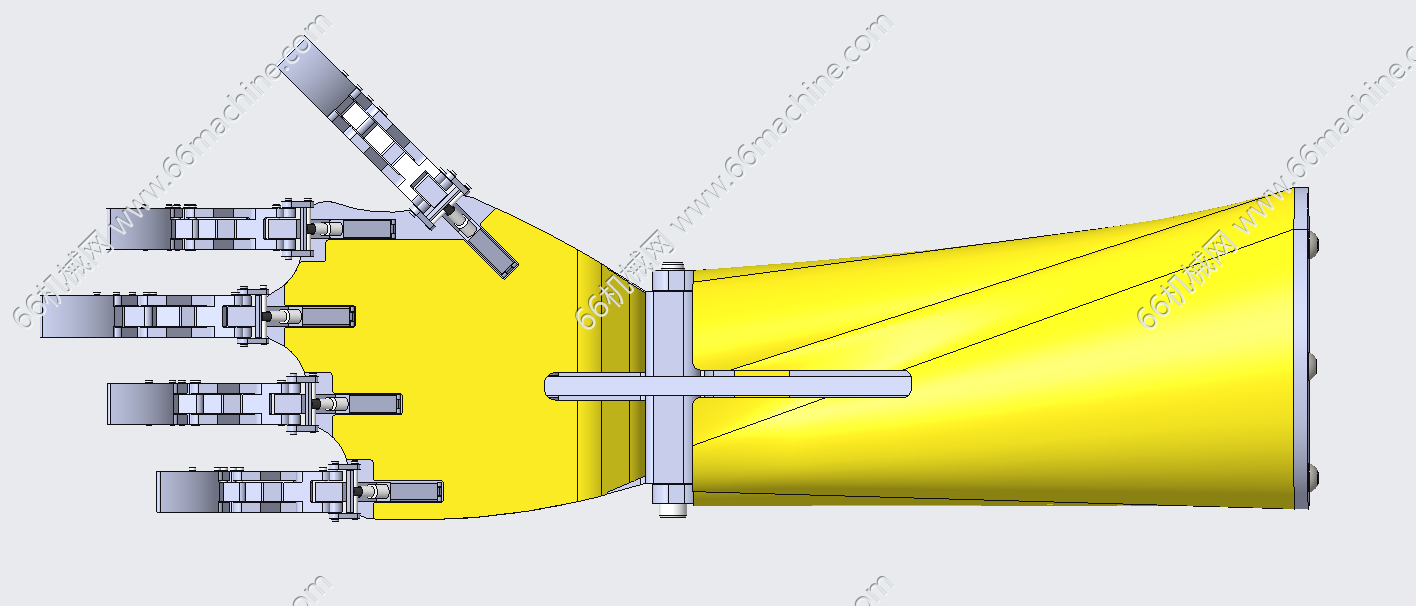
5指柔性仿生机械手俯视图.png
图纸描述
本模型为5指柔性仿生机械手,属于机器人末端执行器,通过多关节连杆与微型驱动单元,模拟人类手指的屈伸、内收/外展动作,可自适应包裹不规则、易损物体,实现精准抓取与精细操作;配合力/位置传感器,能实现温和抓取与精准定位,模块化设计便于维护,主要应用于工业自动化、服务机器人、医疗康复等场景,相比传统夹爪在抓取适应性和精细度上优势显著,更适配复杂作业需求。
