基于同步带传动的取放机构
发布时间:2026-06-30
-
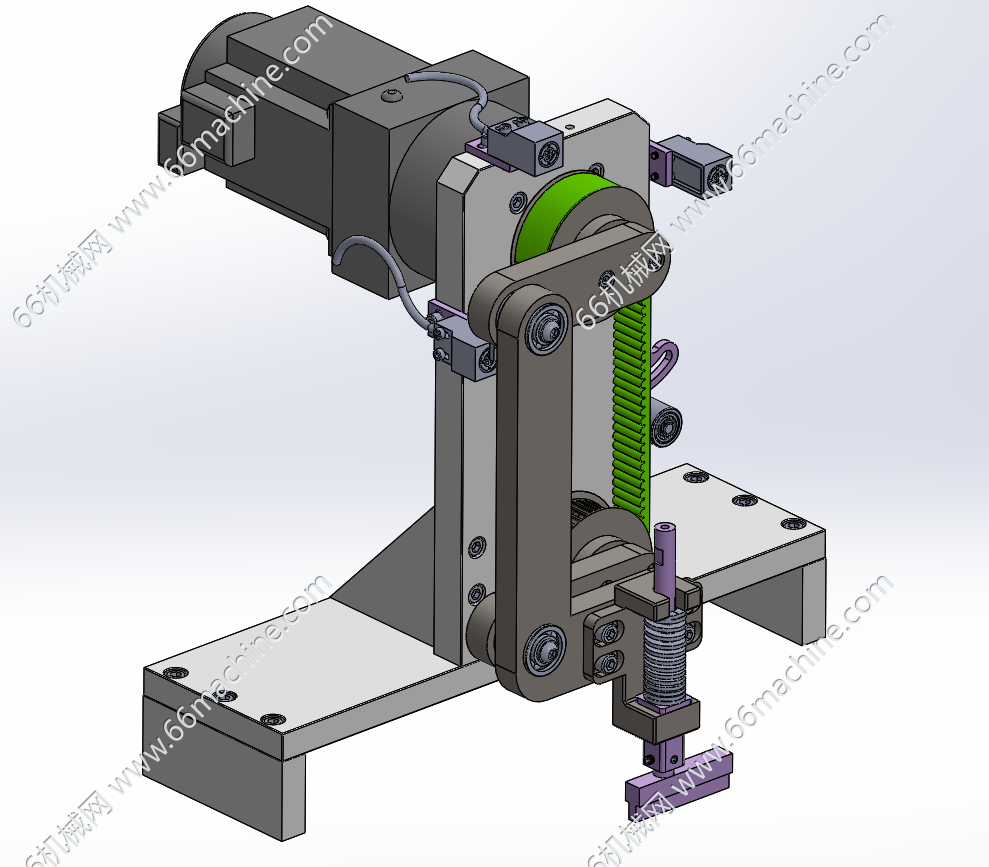
取放机构.png
-
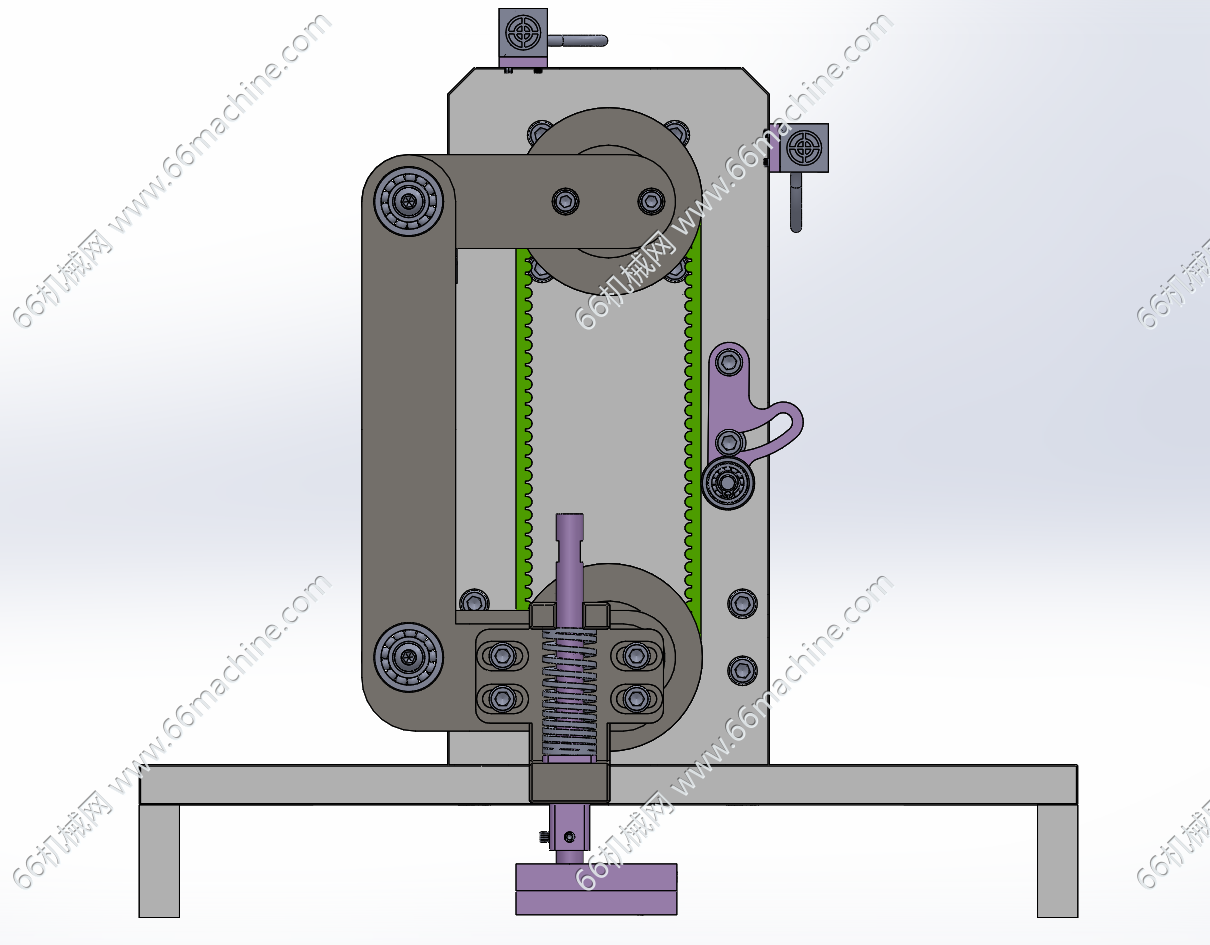
取放机构主视图.png
-
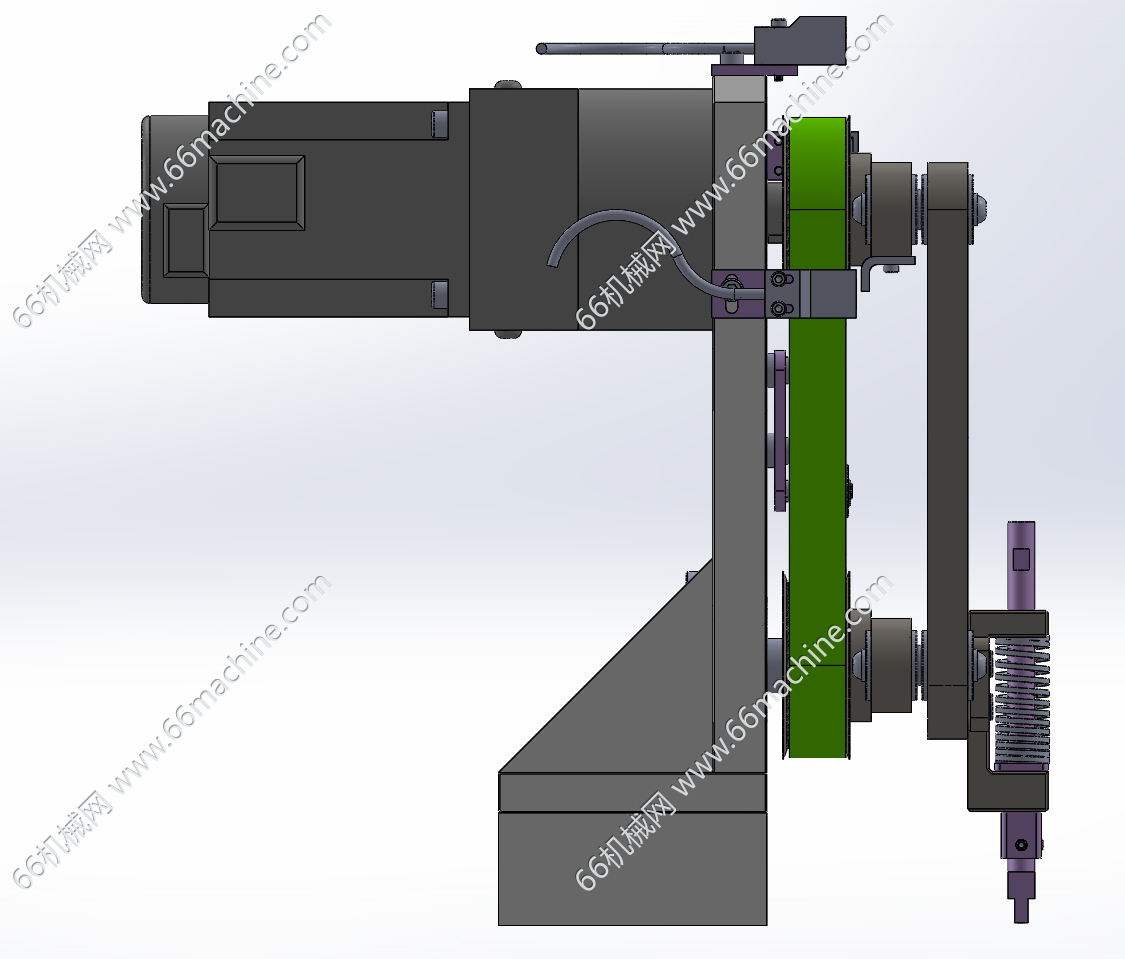
取放机构侧视图.png
-
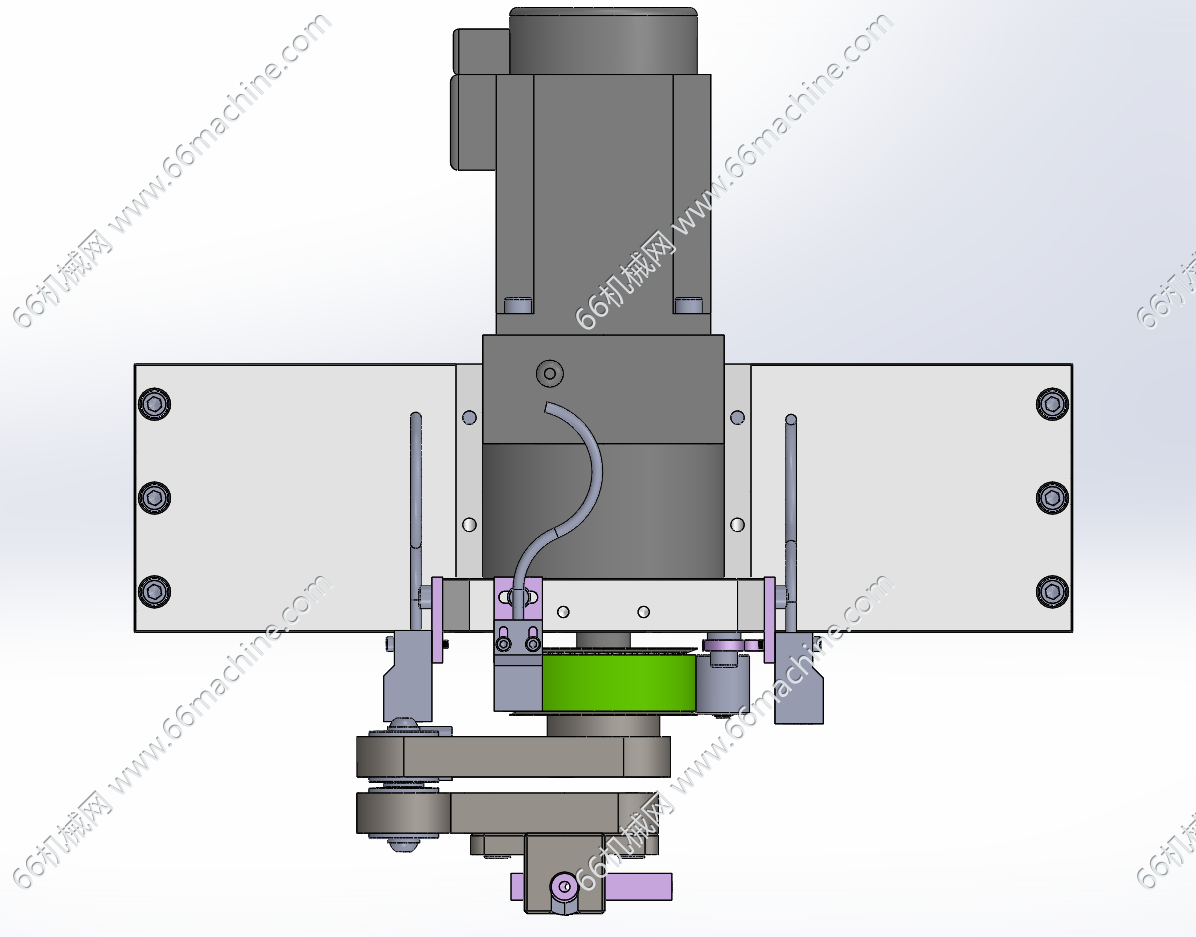
取放机构俯视图.png
图纸描述
基于同步带传动的取放机构是一种利用同步带啮合传动实现执行末端高精度直线或往复运动以完成工件抓取与放置的自动化搬运装置,工作原理是通过伺服电机驱动同步带轮,借助同步带与带轮之间的无滑动啮合将旋转运动精确转换为滑座或机械臂的直线位移,从而带动末端夹爪、真空吸盘或气动手指在取料工位与放料工位之间快速往复移动,同时配合直线导轨保证运动精度与刚性,通过编码器反馈实现全闭环位置控制。
