移栽机械手动态.gif
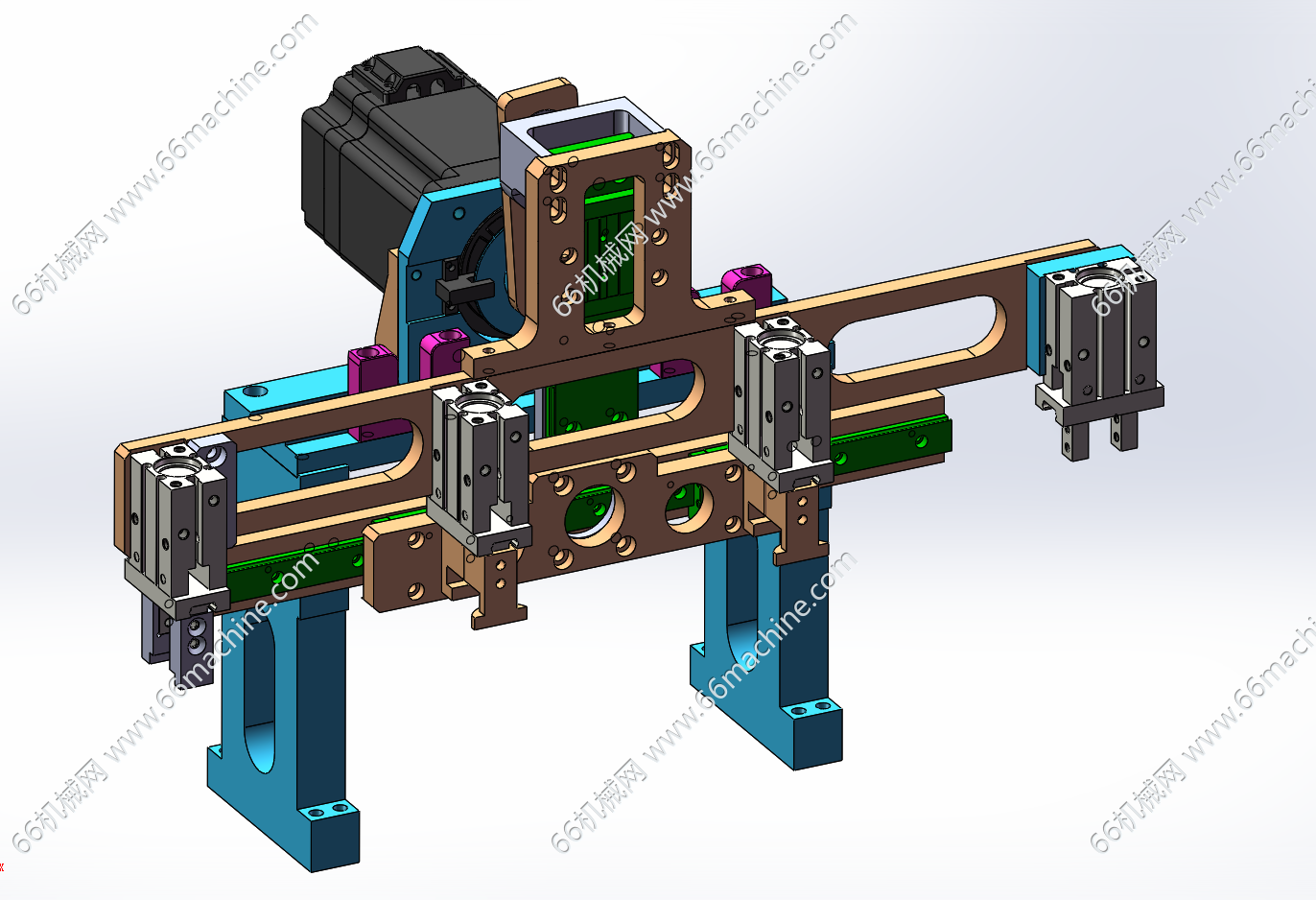
伺服连杆式多工位移栽机械手.png
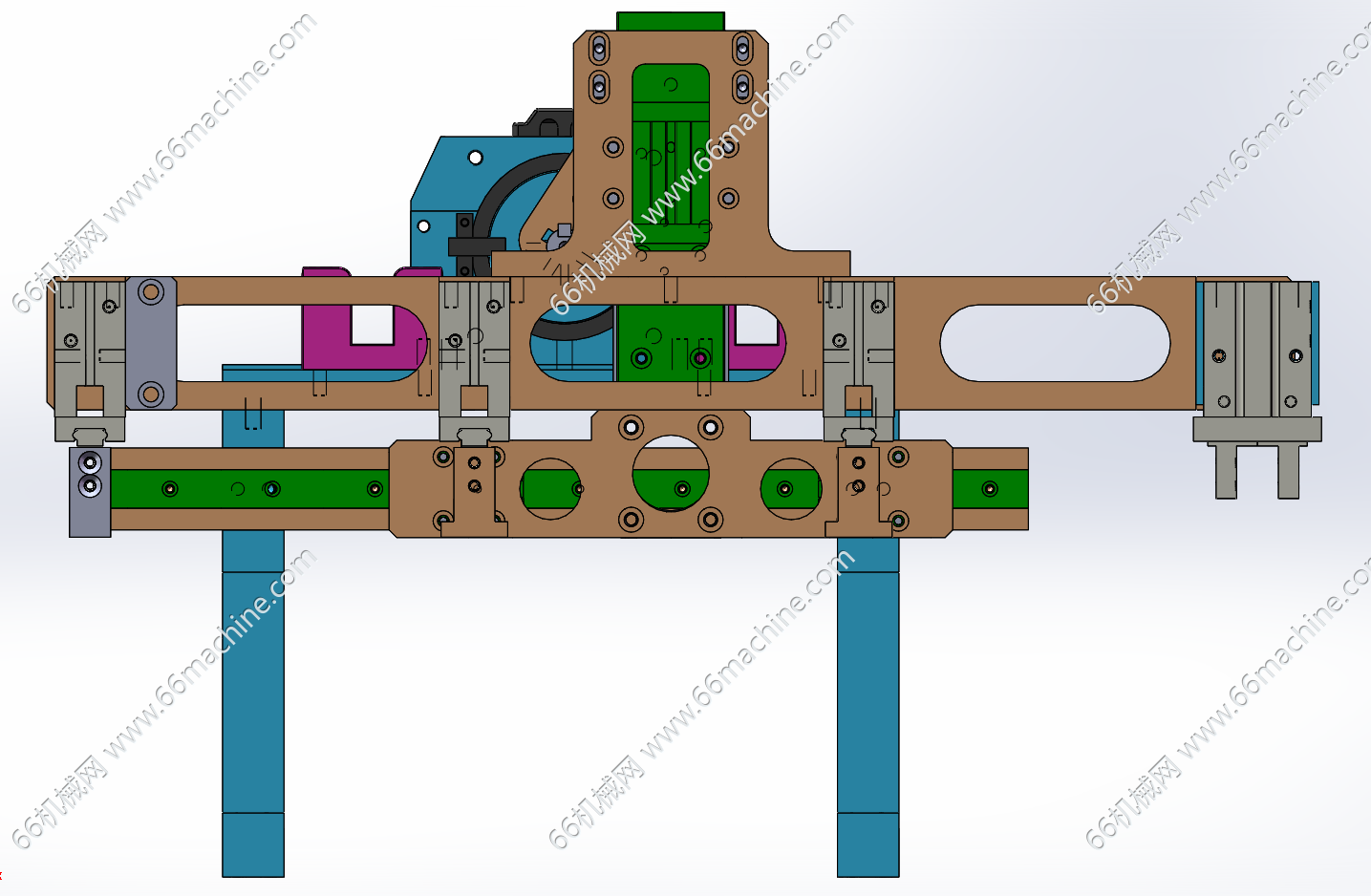
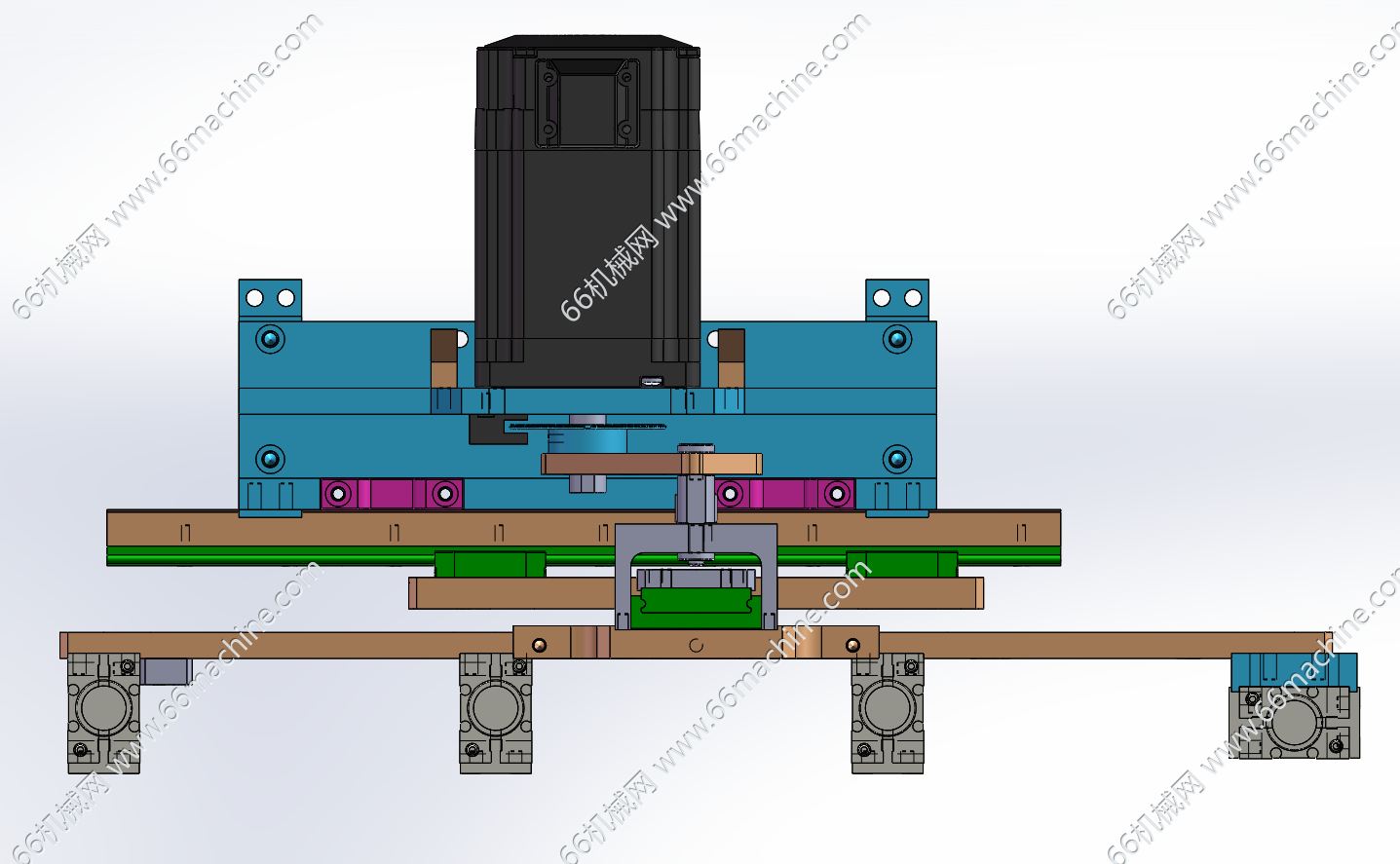
伺服连杆式多工位移栽机械手主视图.png
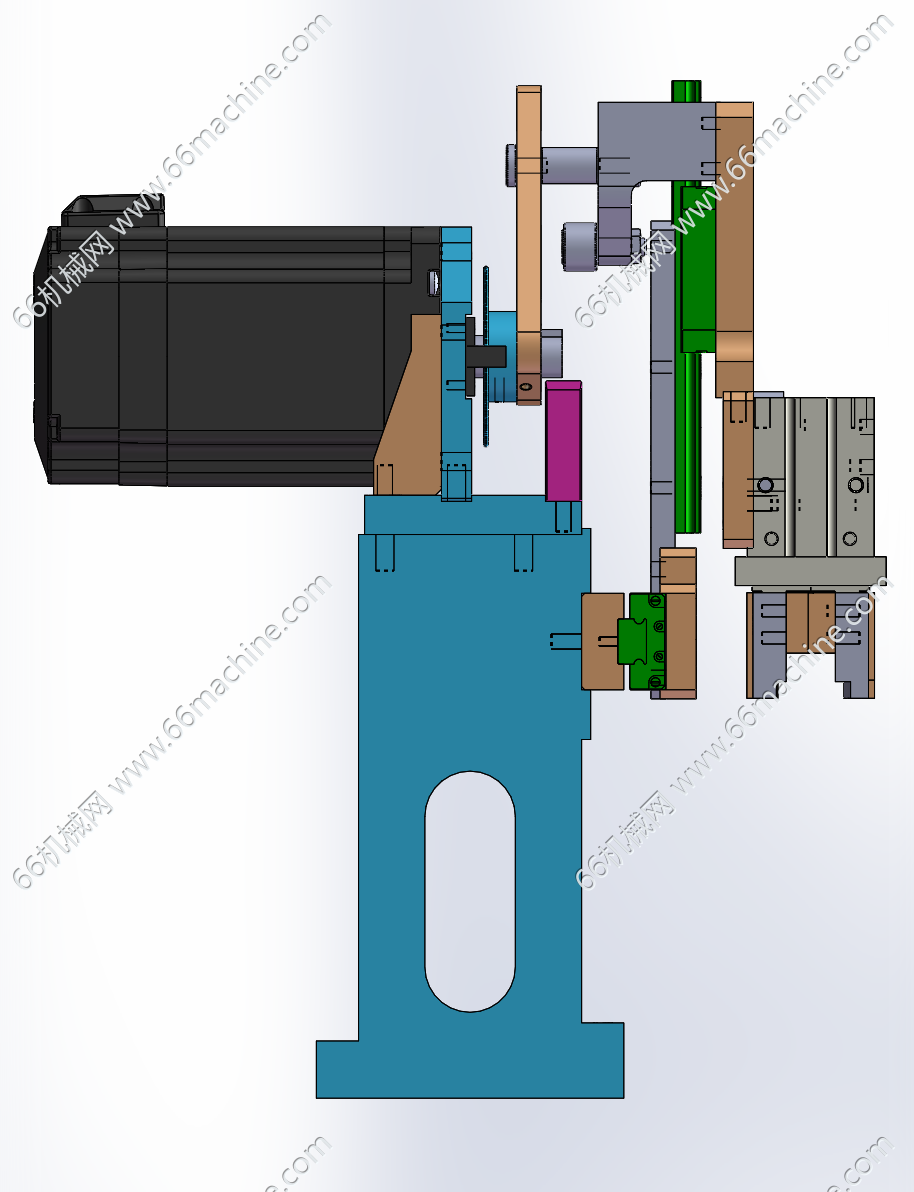
伺服连杆式多工位移栽机械手侧视图.png
伺服连杆式多工位移栽机械手俯视图.png
本模型为一款伺服连杆式多工位移栽机械手,通过伺服电机+连杆机构实现夹爪的N型复合运动,支持多工件同步取放,具备结构紧凑、节拍快、适配性强的特点,广泛应用于电子、精密制造行业的自动化多工位流转场景。
机械打工人
图纸ID: 315092070392009984
图纸格式:SLDPRT、sldprt、sldasm、SLDASM
图纸版本:Solidworks2021
文件大小:8.41MB
所需积分:40机械币
可否编辑: 可进行编辑,包含特征参数
关注人数:0人