冲压搬运机械手的设计(气动机械手)
发布时间:2025-03-19
-

联 接 块.png
-

论文目录.png
-

打包文件.png
-

气缸前端盖零件.png
-
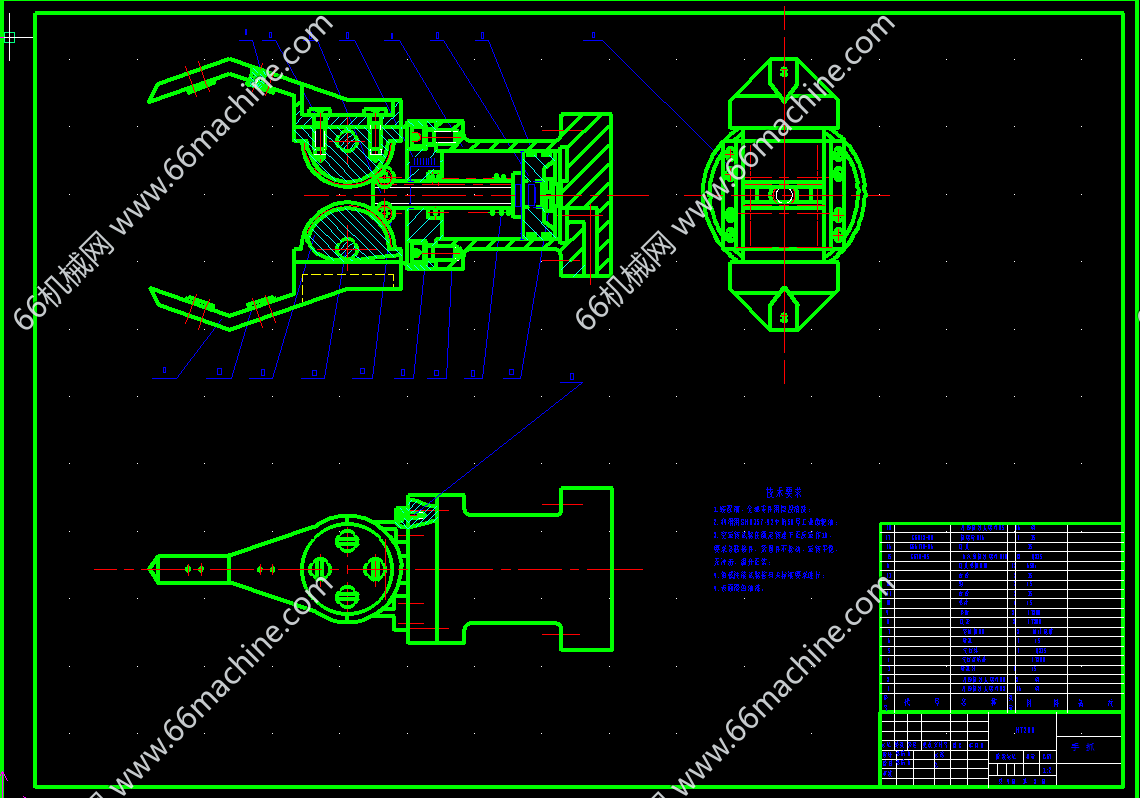
手 抓.png
-

手 指.png
-

旋转活塞.png
-

装配线上料机械手的设计.png
-

摘要.png
图纸描述
机械手的工作原理:机械手主要由执行机构、驱动系统、控制系统以及位置检测装置等所组成。在PLC程序控制的条件下,采用气压传动方式,来实现执行机构的相应部位发生规定要求的,有顺序,有运动轨迹,有一定速度和时间的动作。同时按其控制系统的信息对执行机构发出指令,必要时可对机械手的动作进行监视,当动作有错误或发生故障时即发出报警信号。位置检测装置随时将执行机构的实际位置反馈给控制系统,并与设定的位置进行比较,然后通过控制系统进行调整,从而使执行机构以一定的精度达到设定位置.
