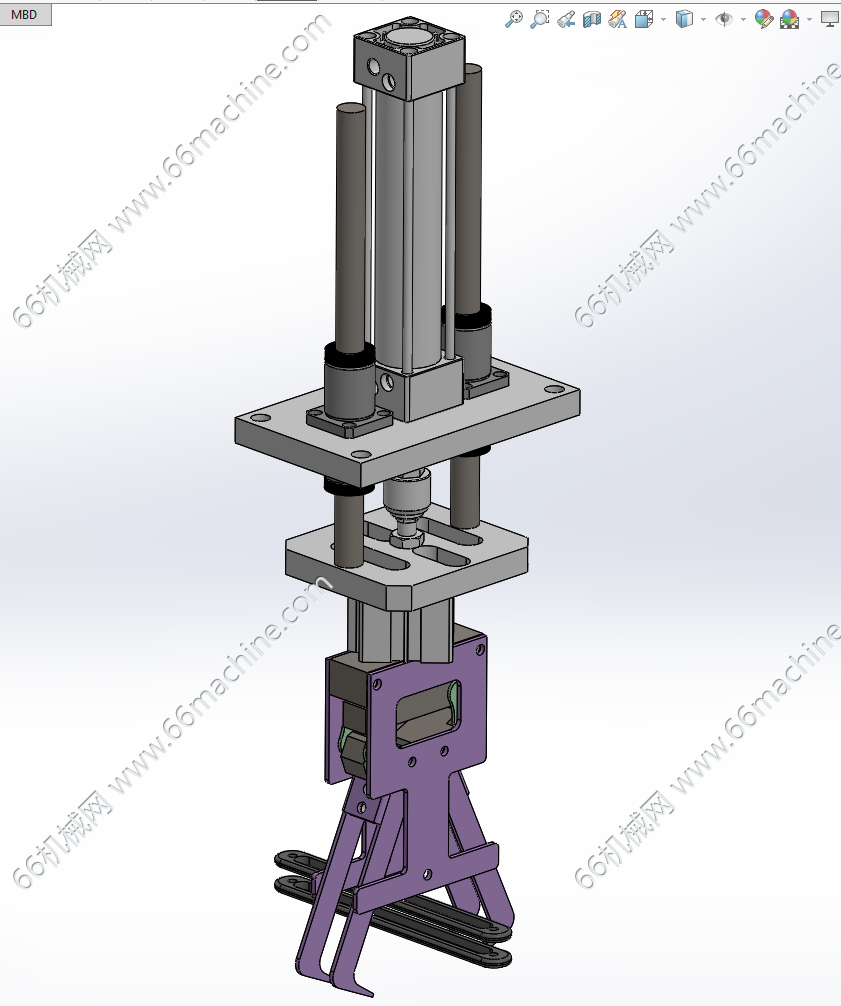
基于连杆原理的夹爪机构.png
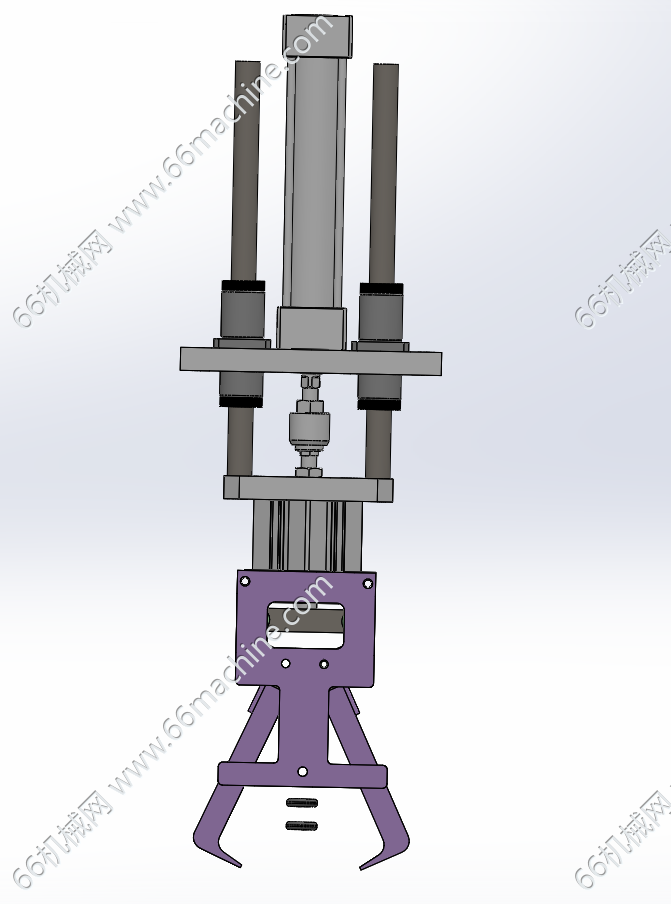
基于连杆原理的夹爪机构主视图.png
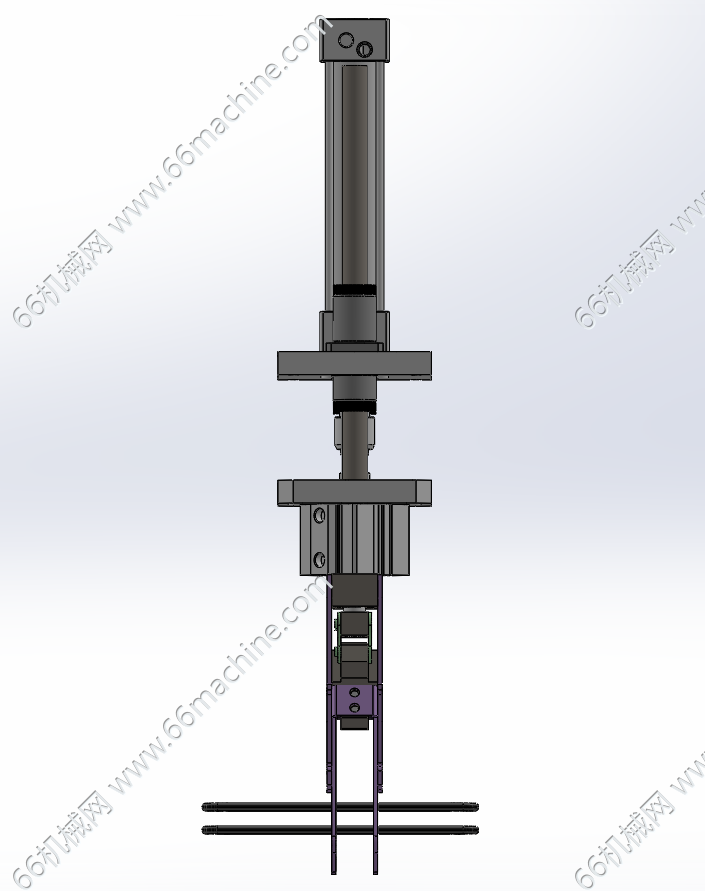
基于连杆原理的夹爪机构侧视图.png
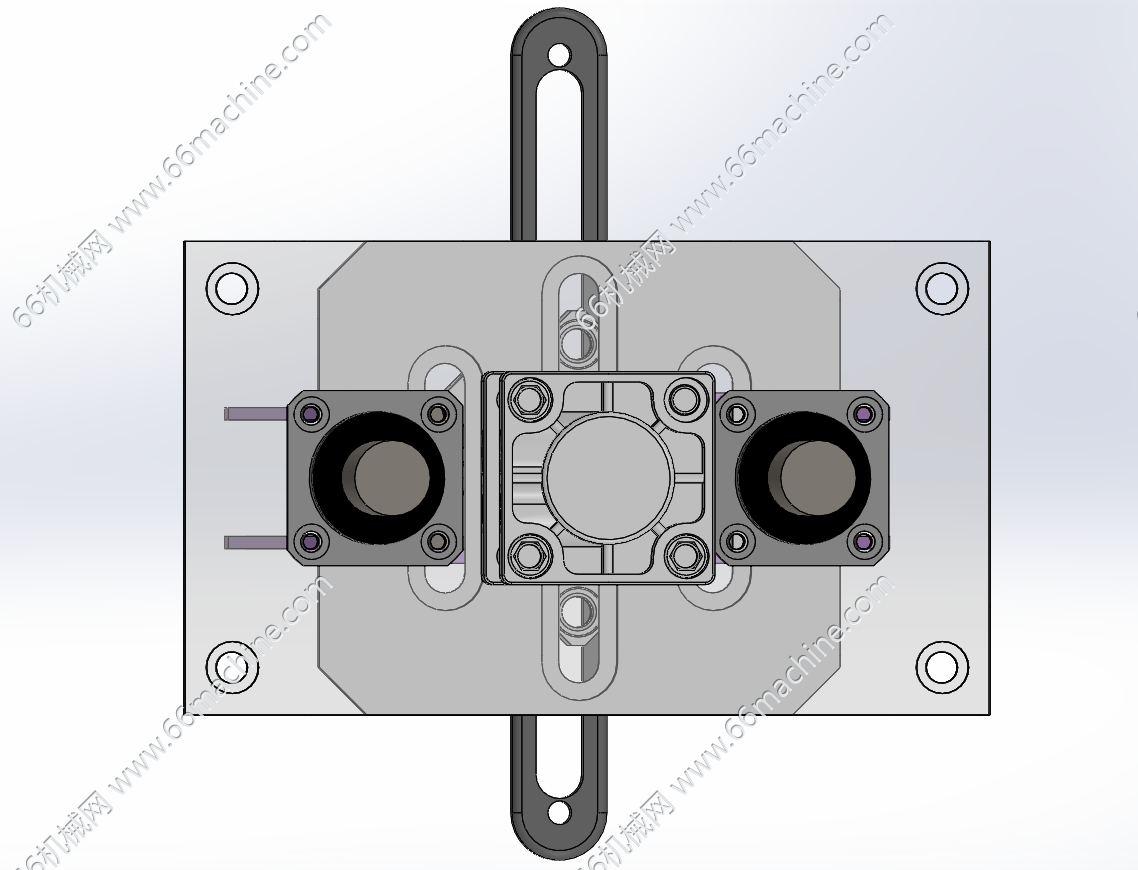
基于连杆原理的夹爪机构俯视图.png
本机构是一种利用连杆之间的铰接与相对运动,将驱动源(如气缸、电机的直线或旋转运动)放大、转换并传递为手指开合运动的机械装置。其核心目的是实现高效、可靠且具有特定力学特性(如增力、平行移动) 的抓取动作,是工业自动化和机器人领域中最经典、应用最广泛的末端执行器之一。
机械狗
图纸ID: 315092070400401028
图纸格式:sldasm、sldprt、SLDASM
图纸版本:Solidworks2018
文件大小:1.59MB
所需积分:10机械币
可否编辑: 可进行编辑,不包含参数
关注人数:0人