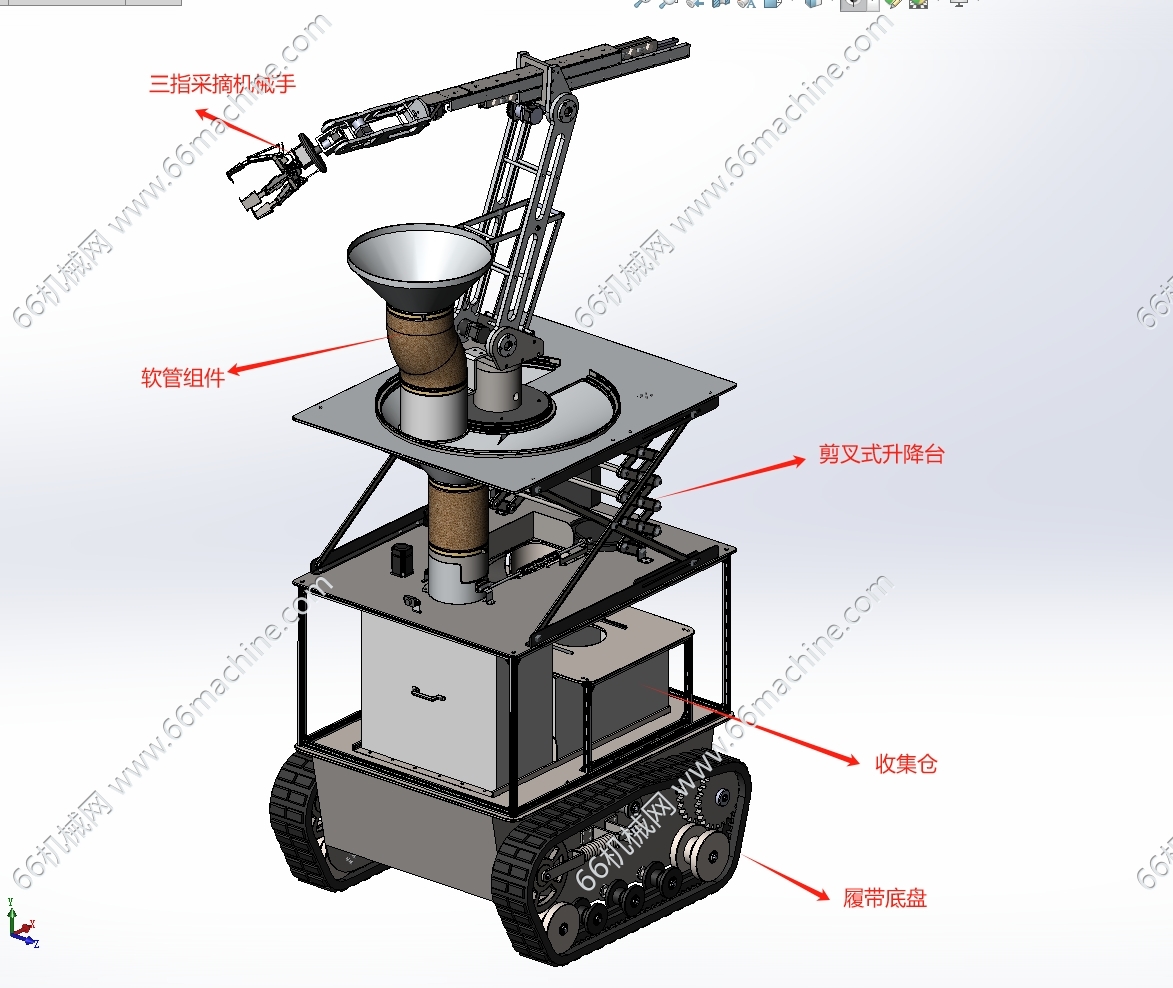
履带式采摘机器人(防损伤果实采摘收集机/采摘车)
发布时间:2025-07-09
-
履带式采摘机器人.png
-

三指采摘机械手.png
-
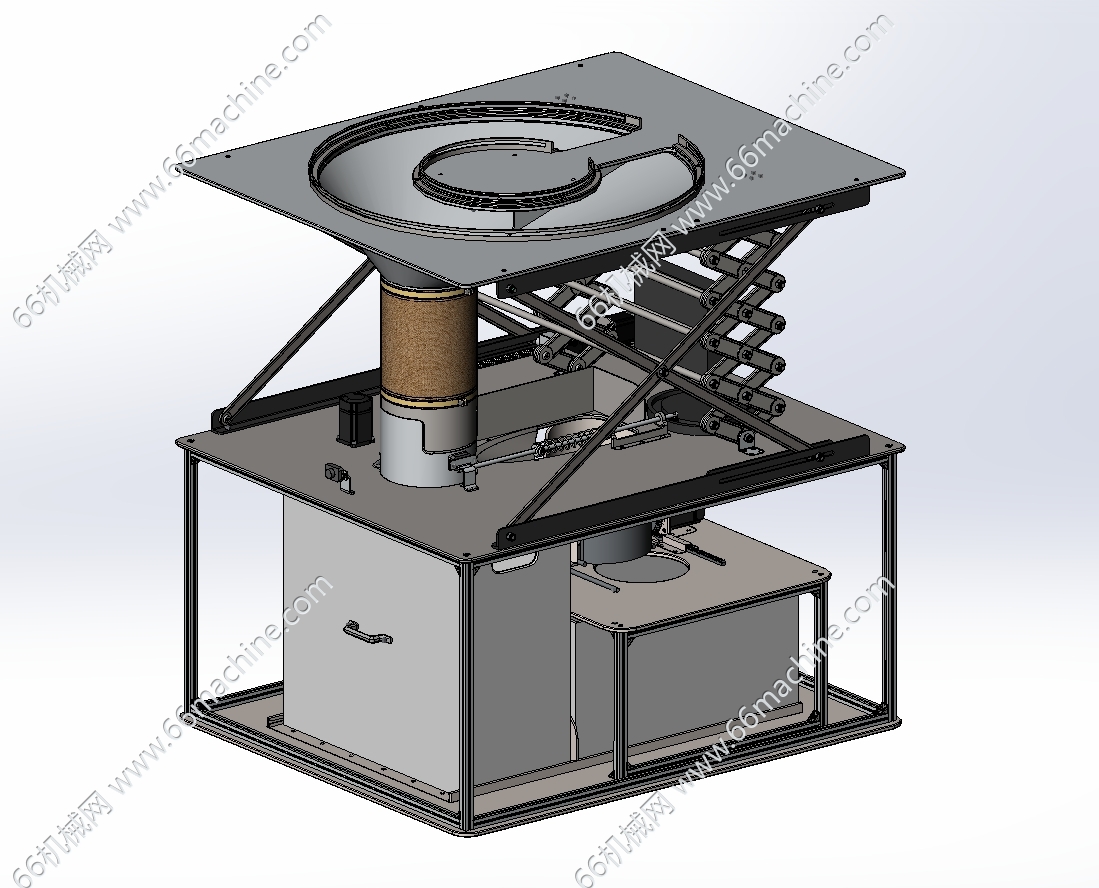
剪叉式升降台及收集箱.png
-
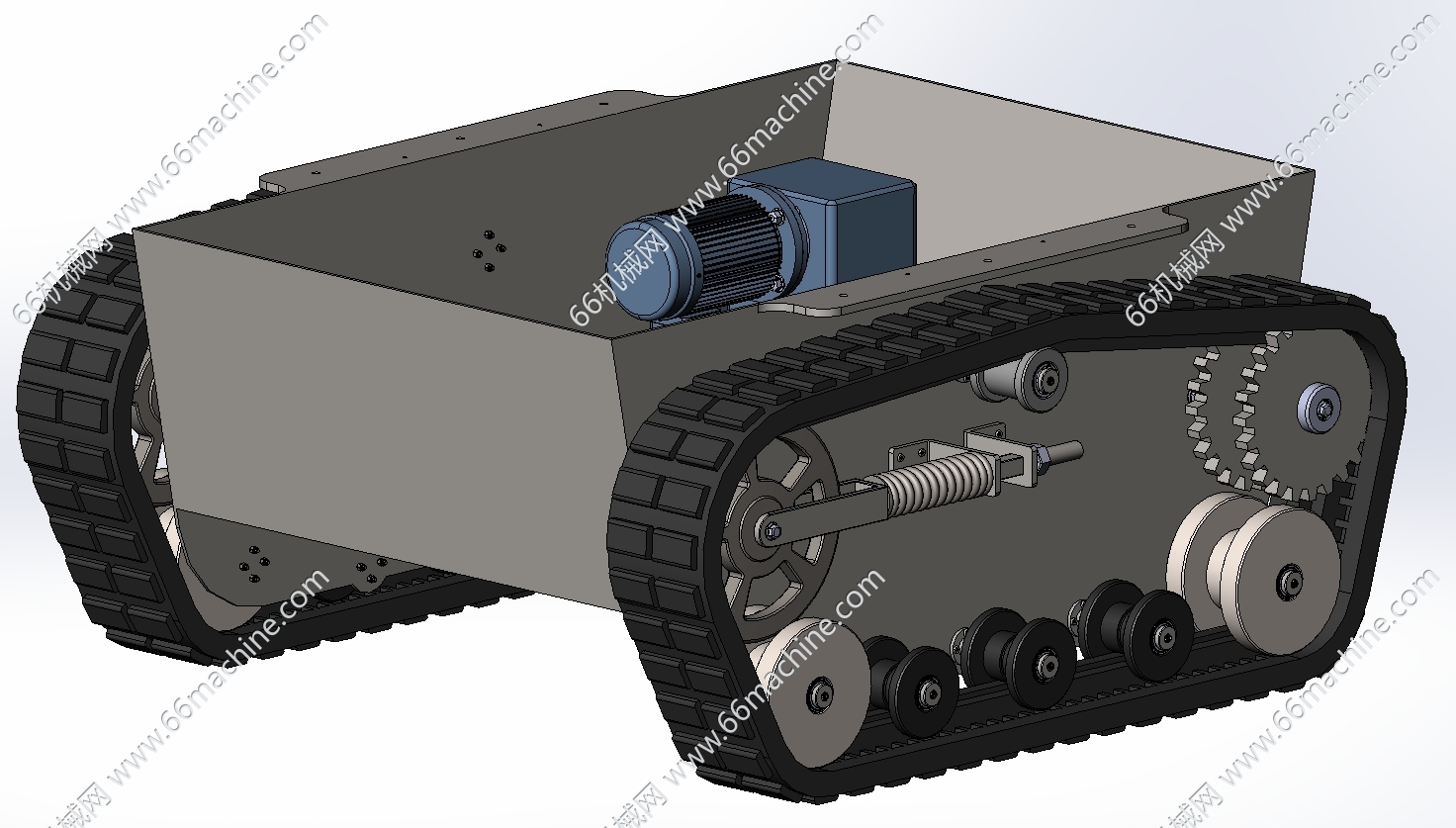
履带底盘.png
-
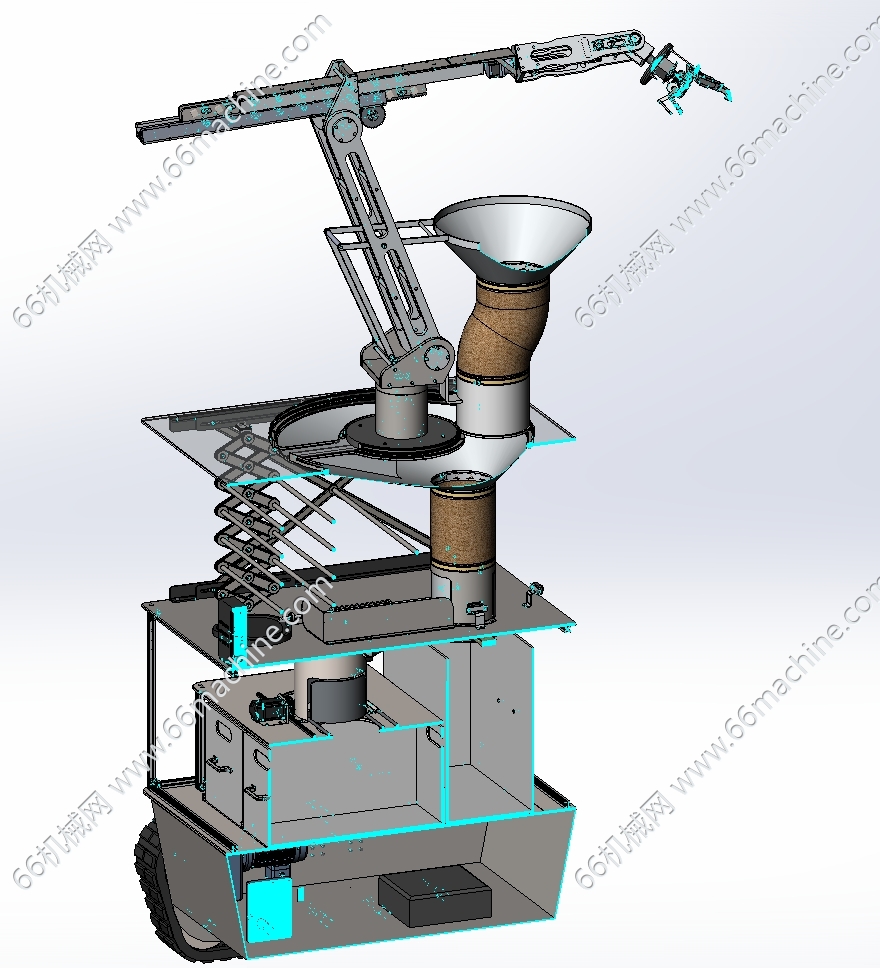
履带式采摘机器人纵剖图.png
-
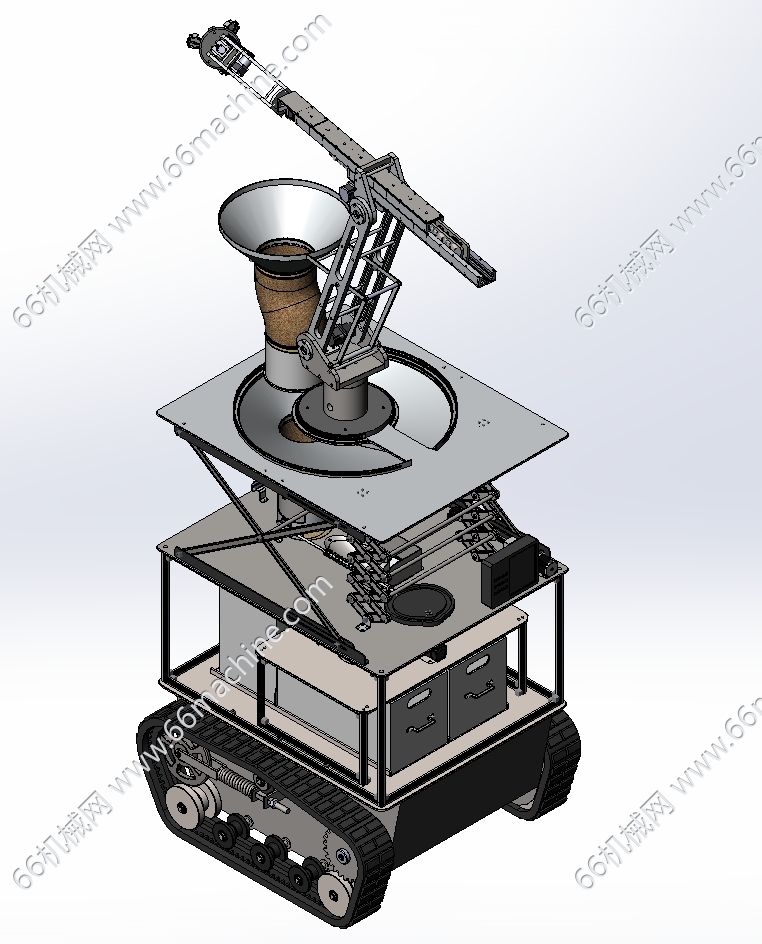
履带式采摘机器人轴测图.png
-
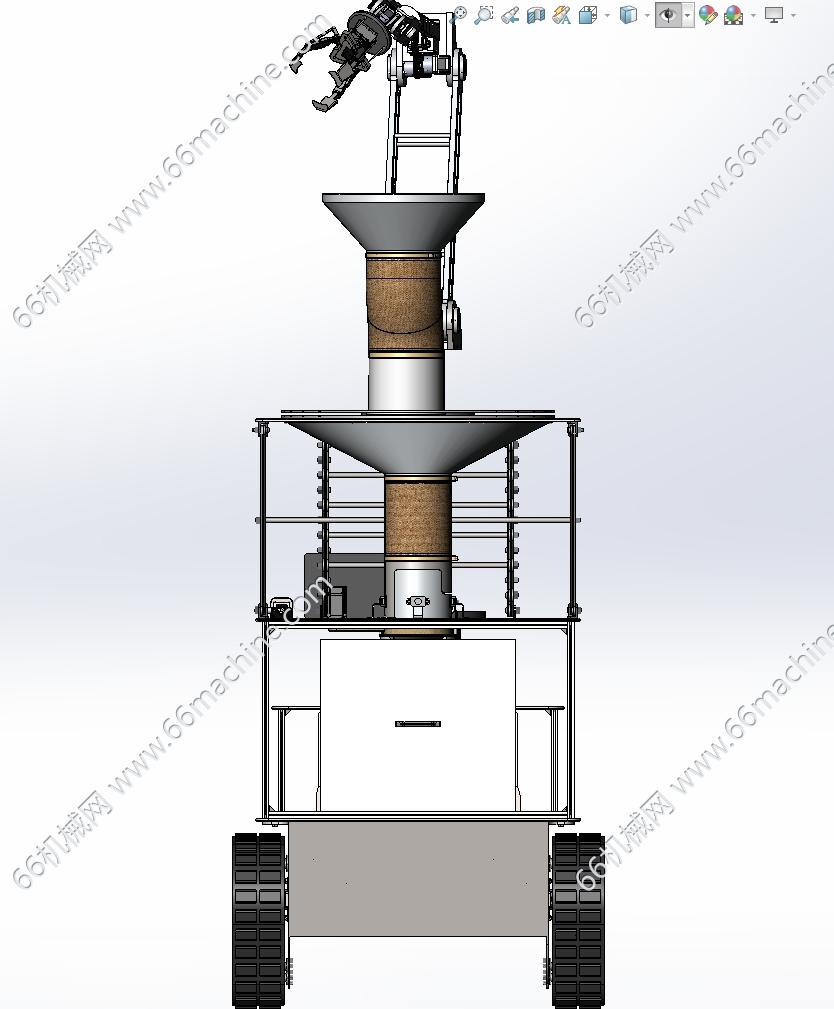
履带式采摘机器人主视图.png
-
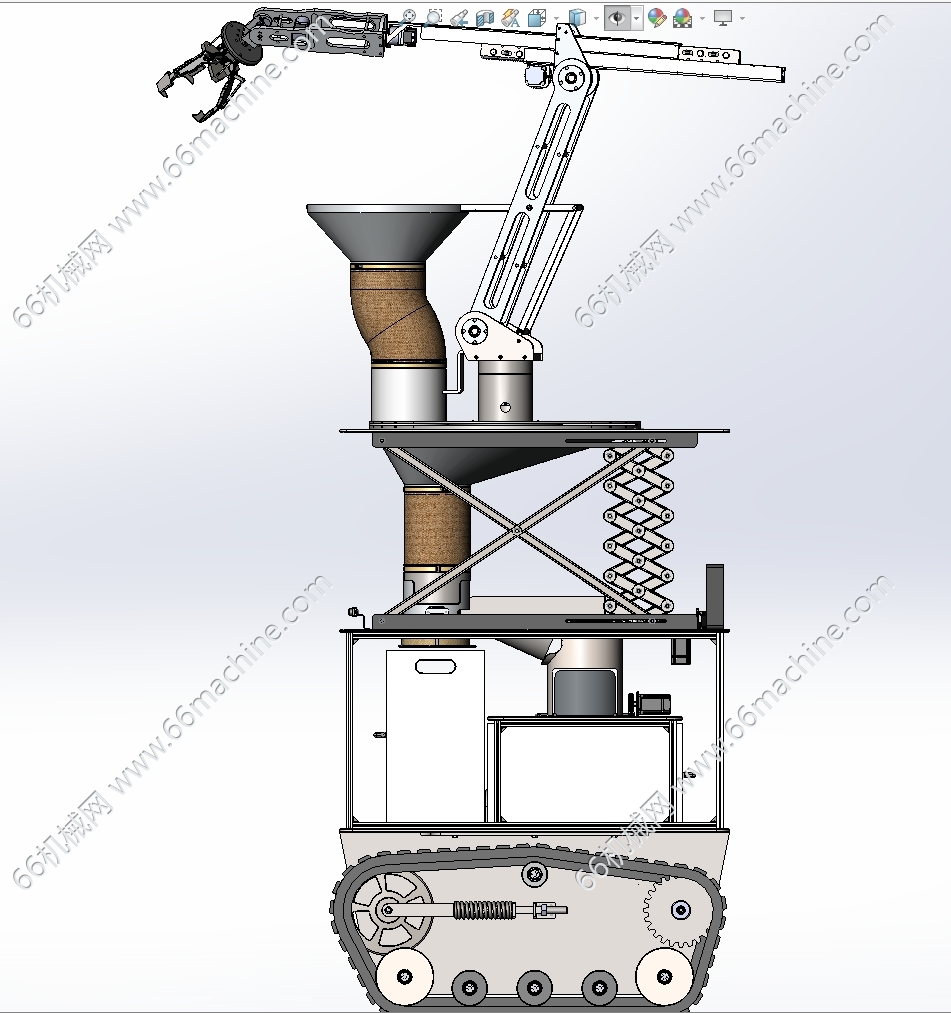
履带式采摘机器人侧视图.png
-
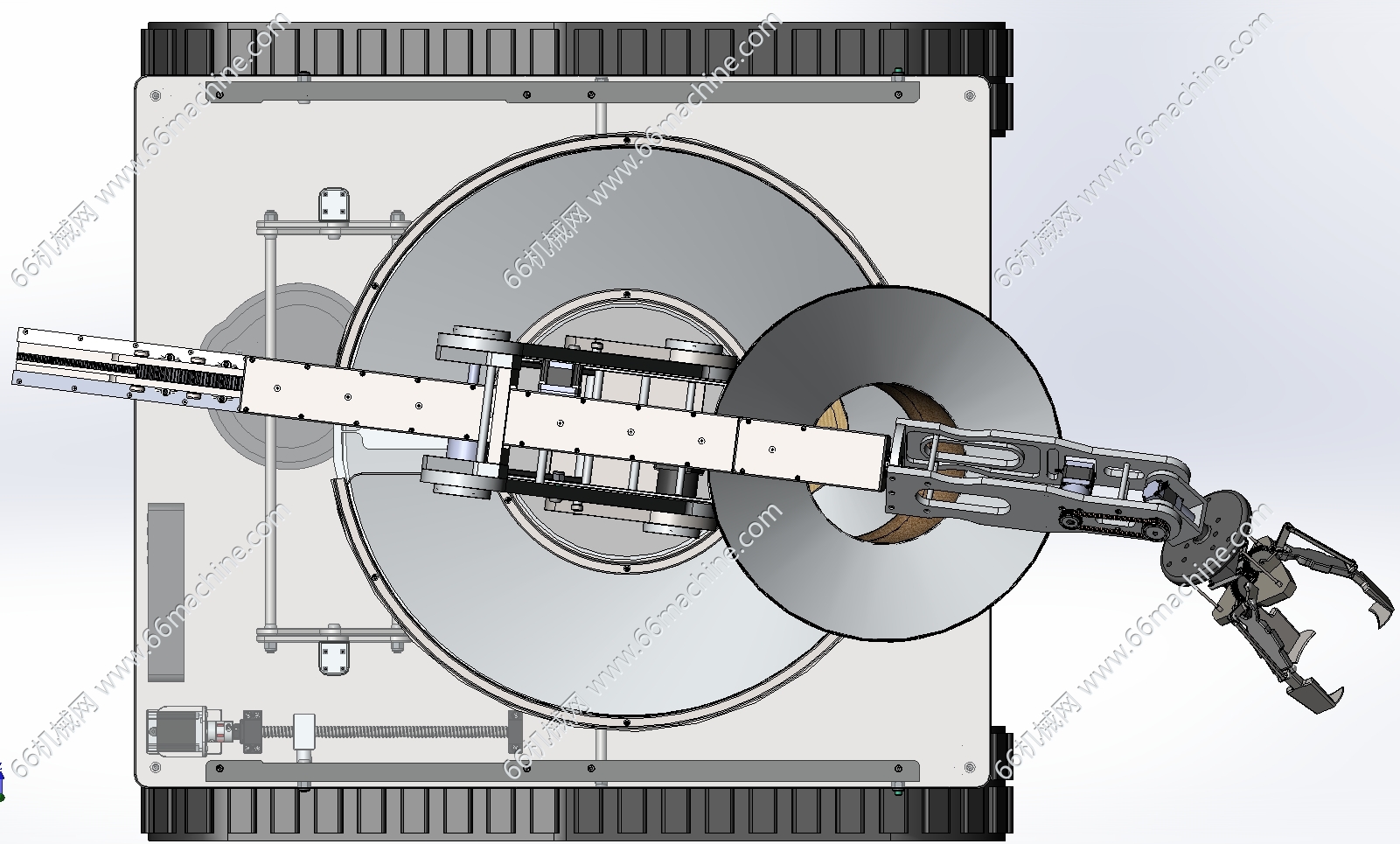
履带式采摘机器人俯视图.png
图纸描述
本模型为履带式采摘机器人(防损伤果实采摘收集机/采摘车),主要由履带底盘、三指采摘机械手、剪叉式升降台、软管组件和收集仓等组成,履带可以适应大部分地形,软管设计可以降低果实的磕碰。可用于苹果、橙子、杨桃等多种水果的自动化采摘作业,建模精巧,可供大家参考!
