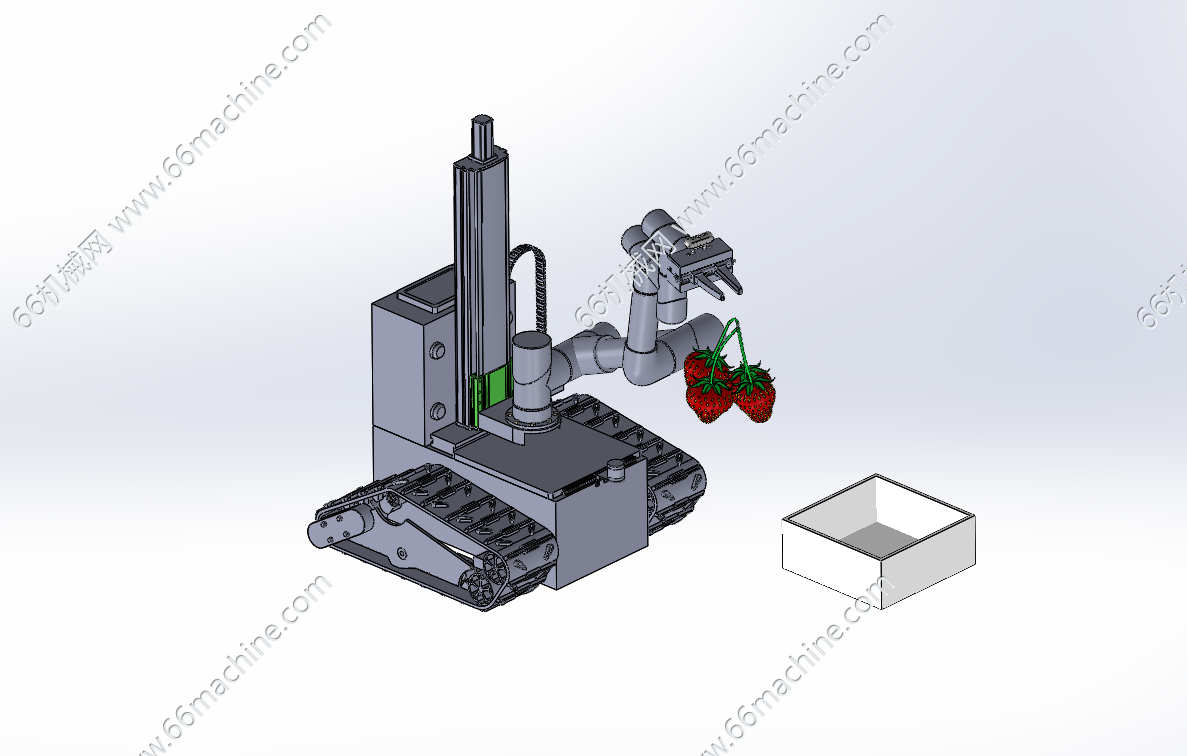
总装图.png
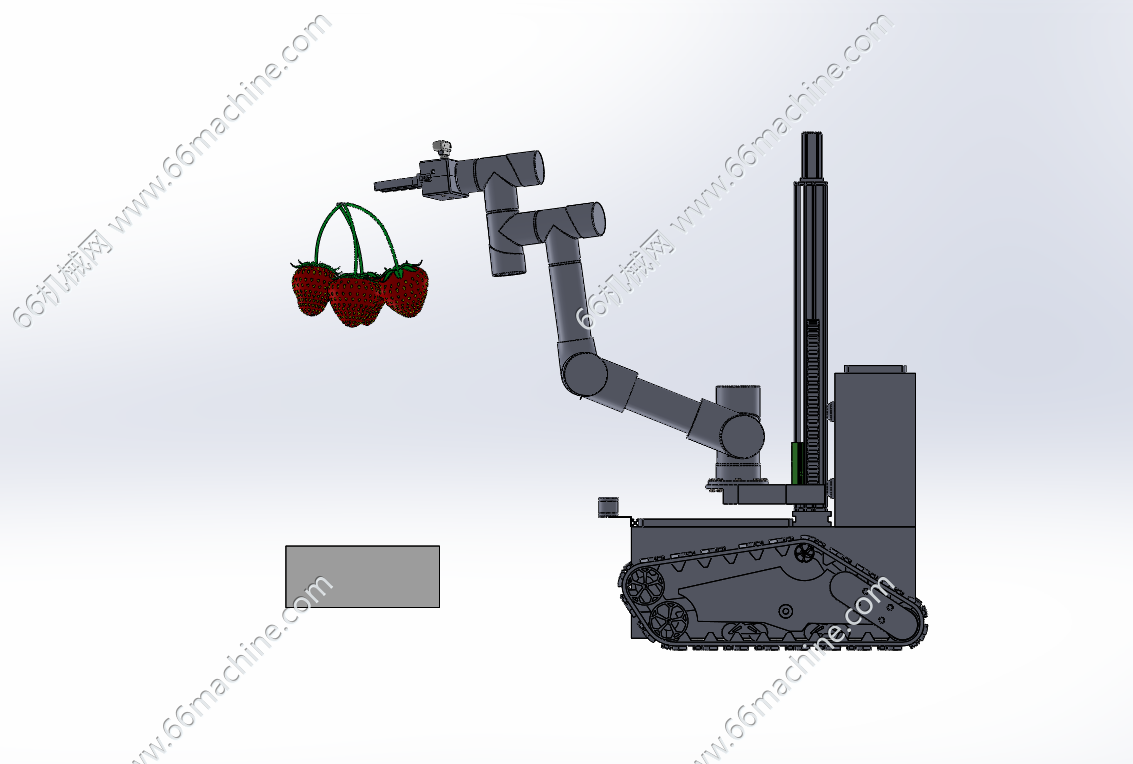
侧视图.png
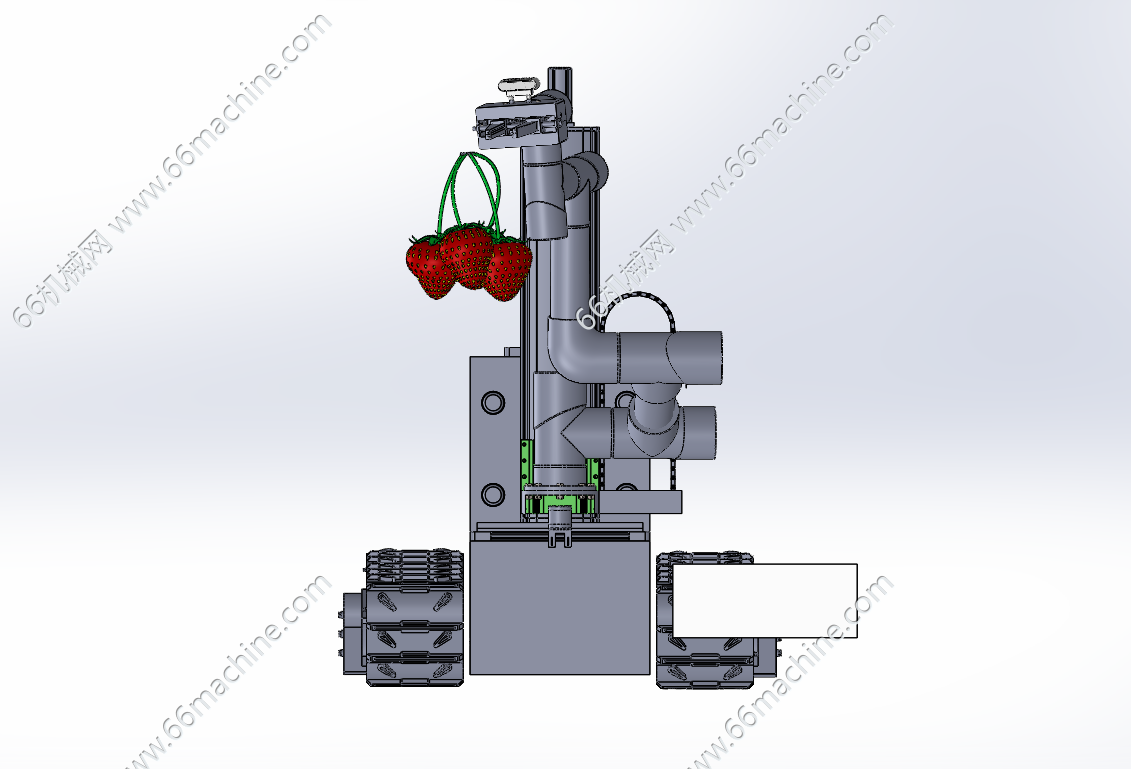
前视图.png
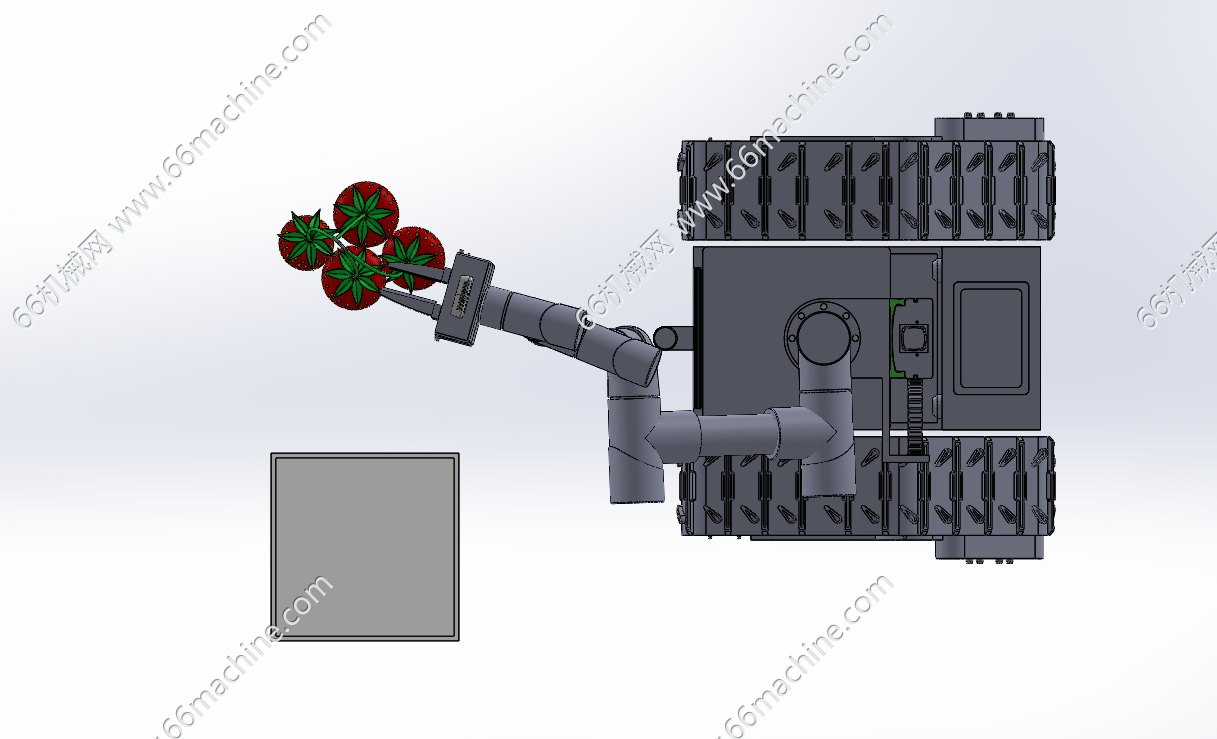
俯视图.png
这是一款基于 SolidWorks 2022 设计的草莓采摘机器人,采用履带式底盘适配田间地形,多自由度机械臂灵活定位。末端执行器可精准夹持成熟草莓,完成剪切采摘与收集作业,配套仿真视频可直观展示其运动轨迹、采摘流程与协同作业,能有效替代人工,提升草莓采收效率与果实完好率。
Eric
图纸ID: 315092070396206458
图纸格式:SLDPRT、STEP、mp4、SLDASM
图纸版本:Solidworks2022
文件大小:126.73MB
所需积分:50机械币
可否编辑: 可进行编辑,包含特征参数
关注人数:0人