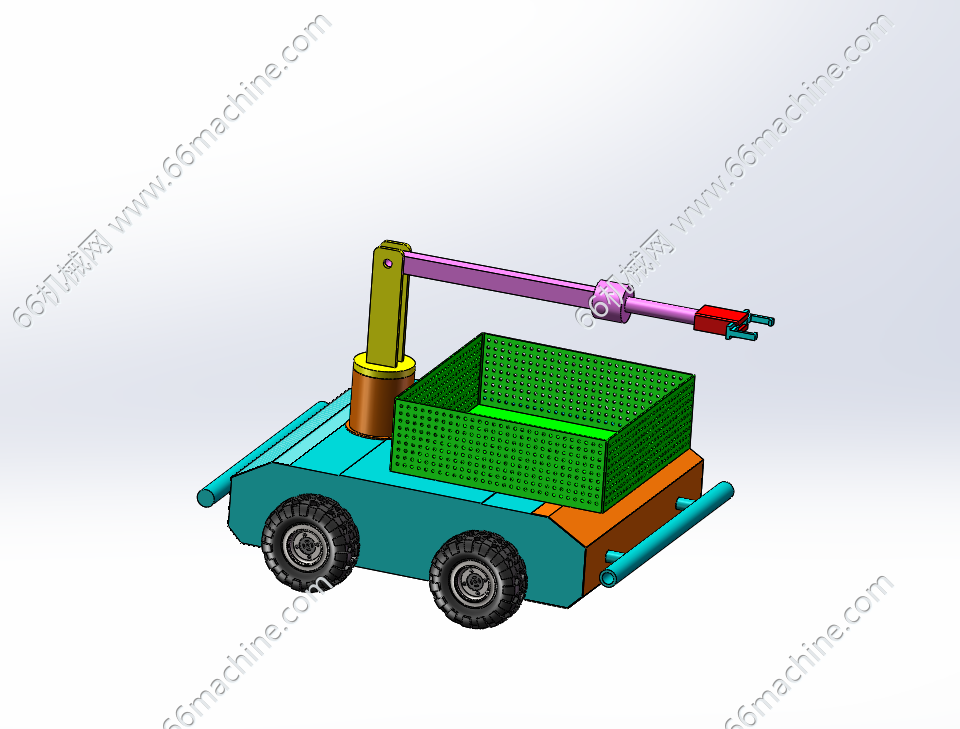
总装图.png
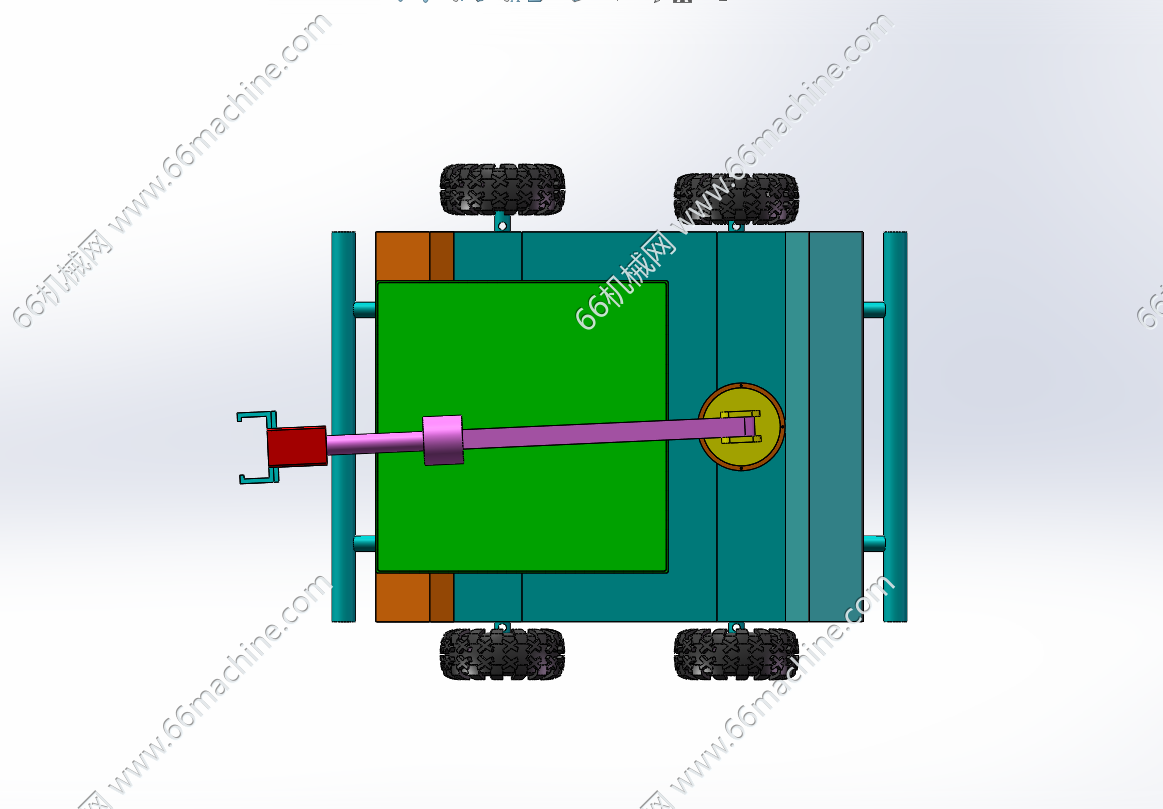
俯视图.png
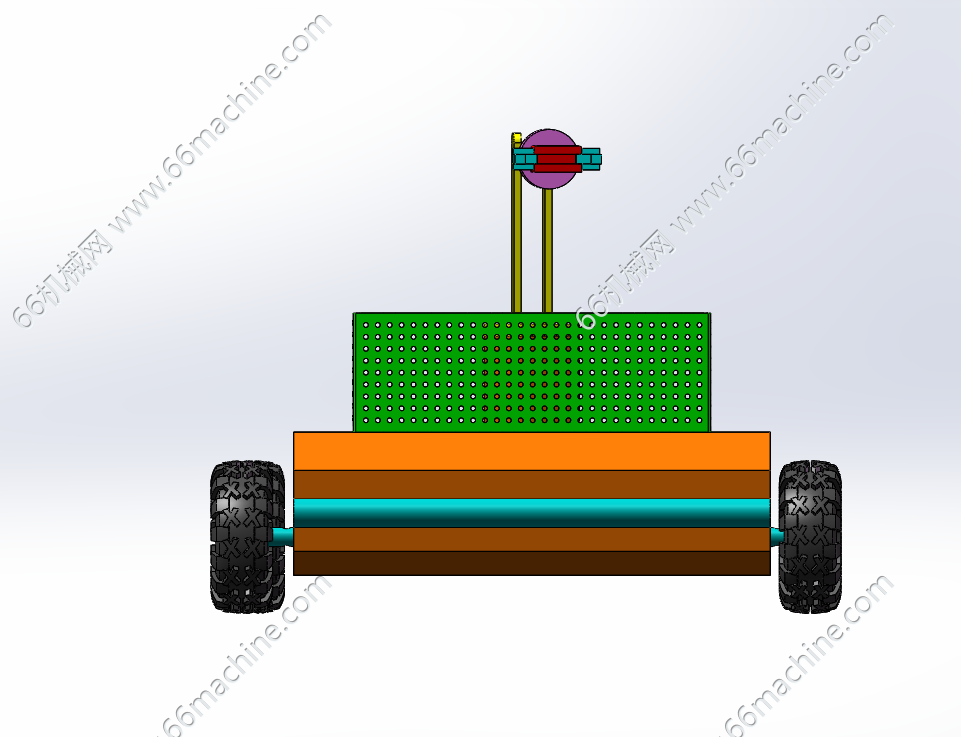
前视图.png
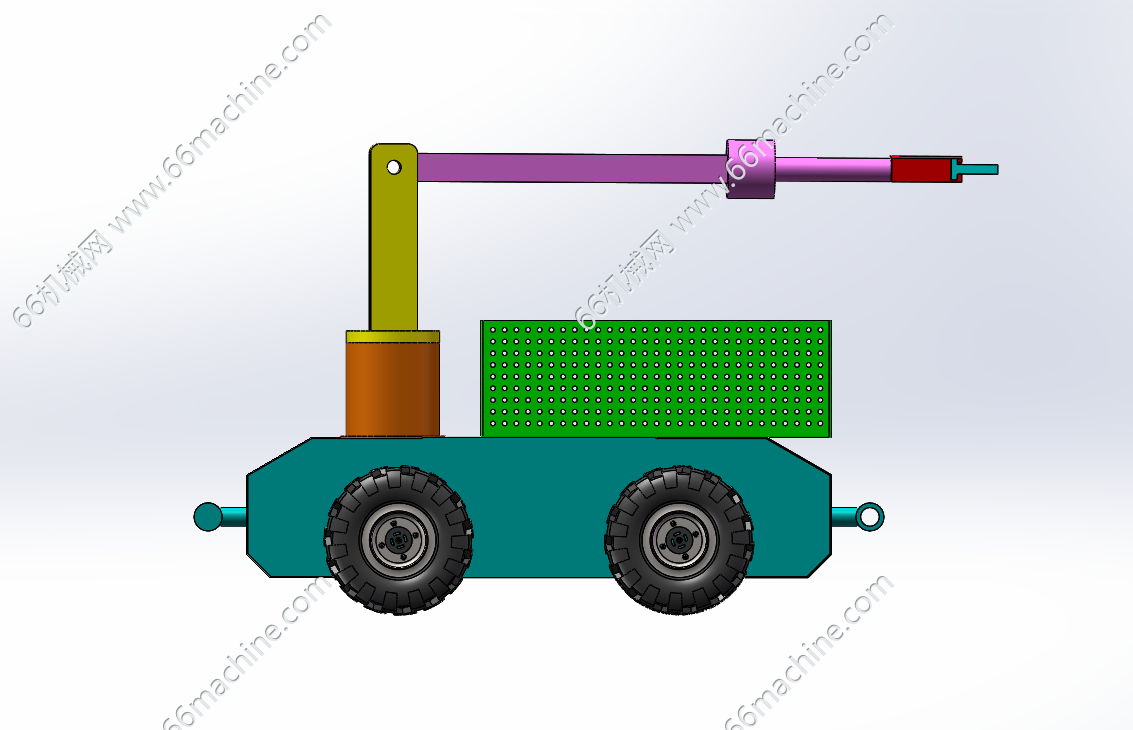
侧视图.png
这款自动草莓采摘机器人采用四轮移动底盘,结构紧凑小巧,适配温室垄间作业。搭载可升降伸缩的单自由度机械臂,末端夹持爪精准定位成熟草莓,完成采摘后将果实送入旁侧镂空料箱。整体设计简洁可靠,能降低人工采摘强度,提升草莓采收效率与果实完整性,适合小型规模化种植场景。
Eric
图纸ID: 315092070396205650
图纸格式:SLDPRT、IGS、SLDASM、STEP、x_t
图纸版本:Solidworks2022
文件大小:12.60MB
所需积分:50机械币
可否编辑: 可进行编辑,包含特征参数
关注人数:0人